Автоматизированный пылесос с автономным источником питания, конечно же, не развивает такую , как ручной вариант. Практические испытания показали большую эффективность использования маленькой щетки совместно с всасывающей турбиной. Для уборки по углам передняя часть пылесоса оснащается 2 щетками, которые при работе подгребают мусор к главной.
Питание роботизированной системы можно осуществлять от нескольких аккумуляторов, напряжение на клеммах которых – 12 V (18 V), а его емкость равняется 7 А*ч. Зарядка осуществляется при прямом контакте либо беспроводным способом. Применение последнего увеличивает расходы на комплектующие детали.
Самостоятельный возврат робота к месту зарядки – сложная задача, которую можно решить установкой передающего маяка.
Любая автоматизированная модель собирается на базе контроллера (мозга системы). Поэтому следует изучить язык его программирования для занесения алгоритма команд. Следует также учитывать интуитивную направленность командного интерфейса, что значительно облегчает процесс. Как микроконтроллер, так и используемые датчики часто имеют стандартизированные разъемы для подсоединений, поэтому пайка требуется редко.

Подготовка к практической реализации проекта
Рассмотрим применение вышеизложенных принципов на базе платформы Arduino Mega 2560. Процесс создания будет состоять из нескольких этапов:
- подготовка инструментов и материалов;
- изготовление корпуса с колесами и отделом под мусор, пылесборника и турбины;
- монтаж датчиков и микроконтроллера, моторов с редукторами, аккумулятора, щеток;
- выполнение электрических подключений;
- введение программы в Arduino, определение согласованности датчиков;
- проверка работоспособности робота-пылесоса и его способности заряжаться самостоятельно.
Идея реализуется с помощью следующих материалов и инструментов:
- контроллер Arduino – 1 шт, с драйверами;
- лист фанеры (либо плотный картон) – 1 м.кв;
- колеса – 3 шт;
- провод сечением не более 0,75 мм.кв (подойдет витая пара) – около 2 м;
- блок питания – 4 аккумулятора по 18 V, индикатор заряда к ним, зарядное устройство;
- инфракрасные датчики – 4 шт, контактные – 2 шт;
- электродвигатели: для турбины – 1 шт, вращающий щетку – 1 шт, 2 мотора с редуктором обеспечивают передвижение;
- поливинилхлоридный корпус – 1 шт;
- клей – 1 упаковка, саморезы – 10 шт, скотч – 1 шт, набор магнитов;
- набор отверток и сверл, плоскогубцы, нож канцелярский, карандаш, линейка, шуруповерт, электролобзик.
Сборка робота-пылесоса
Подготовив все необходимое можно приступать к сборке. Она заключается в прохождении вышеописанных этапов.
Важным моментом работы является возвращение бампера в исходное положение после удара о препятствие, то есть достаточная его упругость.
Все детали закрепляются на имеющиеся для этих целей у них разъемы саморезами либо клеем, скотчем. Полученный результат представлен на фотографии:

Эта статья о том, как я собираю свой робот-пылесос. Здесь много фото и видео для тех, кто тоже горит такой идеей.
19 декабря 2014. Интересоваться роботами-пылесосами я начал пять лет назад в 2009 году, наверное после знакомства с Робофорумом. Все эти годы были попытки что-то начать, но так ничего и не было сделано. Пару месяцев назад я активно читал статьи про робот-пылесос и решил окончательно что куплю Керхер RC 4.000. Прошло время, жена часто стала убираться в кухне и в коридоре, меня это начало раздражать, мысль о роботе всё крепчала. Пару вечеров я опять провёл в картинках и форумах о роботах-пылесосах. Наконец решил, что сделаю робота сам!
Цель создать робот-пылесос не хуже промышленно-изготовленного и избавиться от слоя пыли и мелкого мусора в доме. В процессе изучения устройства роботов выяснилось, что они очень шумные, около 60 дБ, в то время как стационарный домашний моющий пылесос шумит около 80 дБ. Мой самодельный робот должен работать максимально тихо, его габариты не должны превышать габаритов заводских роботов и он должен убирать быстро и качественно.
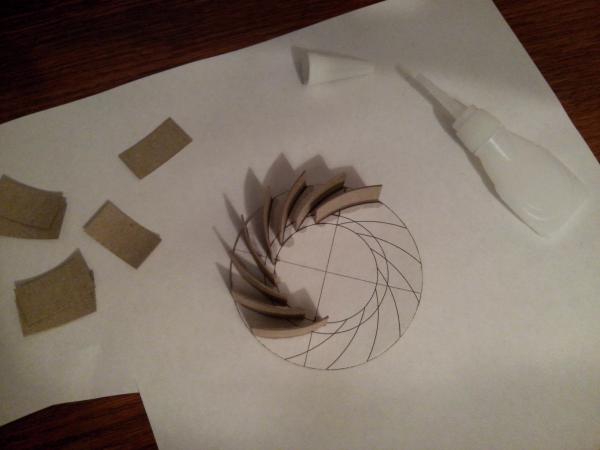
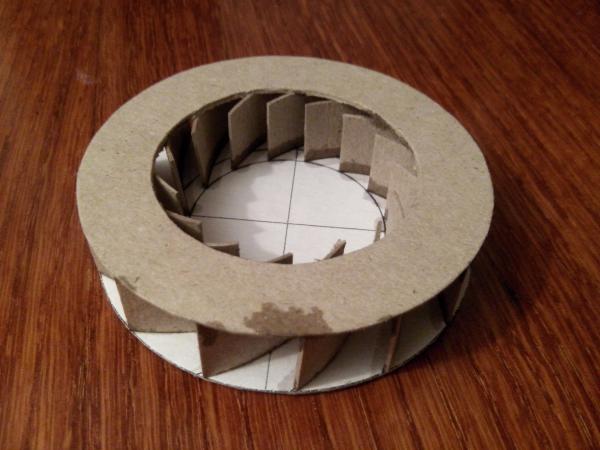
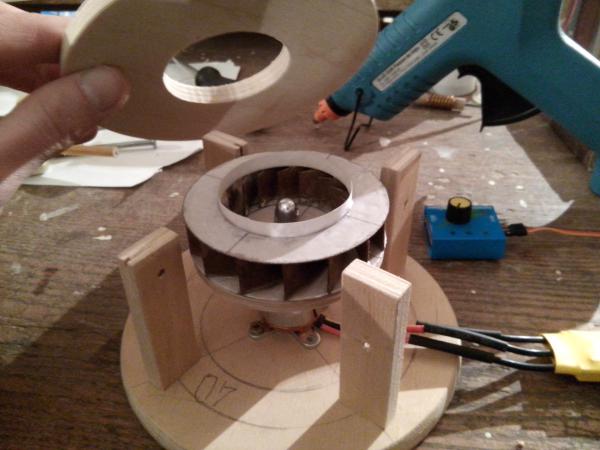
Перым делом надо было решить вопрос со всасывающей турбиной. У меня уже был опыт построения турбин, но все они работали плохо. Для гаража я сделал самодельный пылесос из турбины от старого пылесоса "Ракета". Для робота нужна маленькая турбина, поэтому я начал поиски сначала. Совершенно случайно нашёл на Робофоруме сообщения пользователя Vovan, он поделился чертежом своей турбинки . Не долго мысля я перечертил чертёж и склеил свою турбину.
Турбину я вырезал и склеил из плотного картона при помощи супер-клея за 20 минут. Первые испытания прошли успешно!



20 декабря 2014. Купил сегодня пиллинг для тела:) вобщем-то мне нужна только прозрачная банка с закручивающейся крышкой, содержимое отдал жене. Также купил щетку для одежды с жёстким ворсом, разобрал её, завтра сделаю из неё щётку для своего робота.

В Автокаде сделал наброски расположения элементов в корпусе. Остановился на размерах тазика диаметром 25 см и высотой около 9 см. Пока не понятно влезут ли все элементы, места реально мало, но делать корпус больше не хочется. Поставил сам для себя рамки:)
Вчера в Интернете выписал размеры заводских роботов-пылесосов:
диаметр * высота (см)
36 * 9
32 * 8
32 * 10
30 * 5
22 * 8
Я задумал сделать свой пылесос с циклонным фильтром, поэтому высоту маленькой не сделаешь, её определяет банка для сбора мусора, а вот в диаметре можно выиграть. За циклон конечно спасибо Дайсону, давно пересматриваю его изобретения и даже гаражный пылесос сделал по принципу циклона. Мой фильтр будет простым, без всяких конусов и бешеной мощности всасывания, для первого раза сойдёт.
21 декабря 2014. От половой щётки в гараже отпилил 15 см круглого черенка и сделал из него круглую щётку. Диаметр получился около 70 мм. Размер нереально большой и очень жесткая щетина, не знаю как она себя поведёт, но наверное придётся или переделывать или утяжелять пылесос, потому что щетина будет его подкидывать. Щетину просто вставлял в отверстия без клея, получилось надёжно. Всю конструкцию закрепил на шпильке диаметром 6 мм и по краям два подшипника.
Нашёл в гараже два колеса, не поверите, от пылесоса! Тот самый ручной пылесос в котором не было ничего электрического, только 4 колеса и две щётки приводимые в движние этими колесами. Колёса ждали своего часа около 15 лет:)

Сейчас в Автокаде сделаю очередной чертёж для нескольких деталей, завтра всё вырежу из фанеры и попробую что-нибудь собрать уже на основе.
22 декабря 2014. Очень хочется сделать робот-пылесос своими руками и закончить его до нового года 2015. Вчера ночью на Ютубе посмотрел снова несколько роликов про роботов-пылесосов и в частности два ролика про Дайсон 360 Eye и Fluffy:
После первого видео с роботом Дайсона я понял, что делая своего робота диаметром 25 см и щётку длиной 15 см я буду оставлять грязные места вдоль плинтуса на ширину 5 см. После второго видео мозг вообще перезагрузился и подумал не сделать ли счётку впереди робота?! Что буду делать дальше пока не знаю, тесты покажут.
Итак, сегодня купил новый совок и две щётки с более мягкой щетиной. Совок купил из-за резинки, которая приклеена по краю, она прекрасно подойдёт для моей конструкции.

Геометрию корпуса немного изменил исходя из новых мыслей и новой щётки. Размер робота по прежнему 25 см, но теперь это половина круга и половина квадрата. Ширина щётки 21 см, диаметр около 6 см. Выпилил основание из фанеры 8 мм, прикрепил колёса и щетку, завтра сделаю редуктор и попробую что-нибудь подмести:)

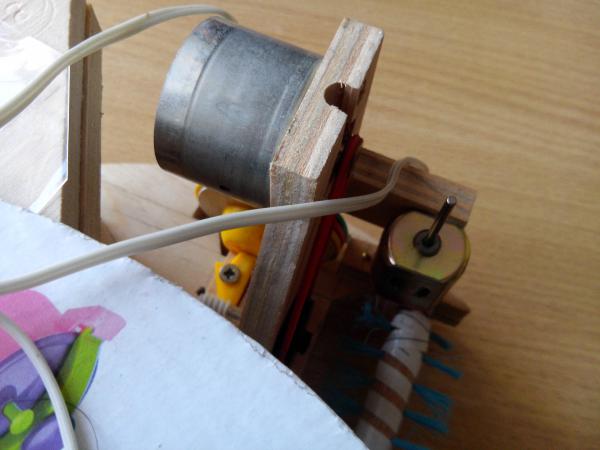
23 декабря 2014. Прикрутил к щётке шестерню и рядом прикрепил редуктор, в качестве пассика использовал резинку для денег, для теста прикрутил шурупом мотор. Ниже на видео тест на 6-ти и 9-ти вольтах.
Скорее всего щётку снова переделаю, слишком короткий ворс и слишком жёстко. Ворс должен быть без пропусков, потому что остаются полосы грязи. В целом зрелищно получилось:)
Прикинул хватит ли мне места на три мотора в корпусе. Два мотора будут крутить два колеса и один щётку. Плюс ко всему много места займут редукторы. Пришла идея заменить шестерёночные редукторы на червячный, может быть сделаю пару тестов.
Всасывающую турбину покрыл два раза слоем эпоксидной смолы, стала как пластиковая. Картон больше не гнётся и если попадёт вода всё будет хорошо. Центрировать не пришлось, крутится идеально. Между тем готовлю основу для мусоросборной банки. Сделал фильтр тонкой очистки из горлышка и крышки от бутылки из под кефира. В качестве фильтрующей ткани взял одноразовый мешок от пылесоса. Пока всё клеится, через пару дней прикручу на основу и снова всё протестирую.

На протяжении работы над роботом постоянно приходит в голову мысль обзавестись 3D-принтером. С трёхмерным принтером было бы куда проще создавать такие детали как мне нужно и с высокой точностью. Когда дрелью сверлишь фанеру сверло может увести или наклон не точно 90 градусов, тут о высокой точности можно только мечтать. К тому же детали из фанеры очень громоздкие, на 3D-принтере всё было бы аккуратненько.
24 декабря 2014. С утра протестировал турбину и банку для сбора мусора, днём повторил эксперимент с более высоким напряженим. Результаты не впечатляют. Фильтр тонкой очистки пришлось пока открутить, потому как через него мощность сильно падает. В банке мусор крутится очень эффектно, но реально мощности всасывания не хватает.
Тест турбины с высоким напряжением.
В эти моменты появилось желание на всё забить, зачем я вообще за это взялся. Сейчас очень легко всё бросить и забыть - так проще всего.
Вечером взял бесколлекторный мотор и начал клеить для него новую турбину по тем же чертежам.
25 декабря 2014. Доклеил вторую турбину для бесколлекторного мотора, хотел протестировать, оказалось мотор вращается не в ту сторону. Завтра пойду в гараж перепаивать провода, а пока всё отложил в сторонку.
26 декабря 2014. Перепаял провода между контроллером и двигателем, получил вращение в нужном направлении. Турбина начала работать, но пару тестов на коленке получились снова печальными. Может быть даже переделаю конструкцию турбины, добавив немного конусности, но об этом позже.
Последние два дня очень мало уделил времени разработкам, постараюсь завтра выделить 4-5 часов.
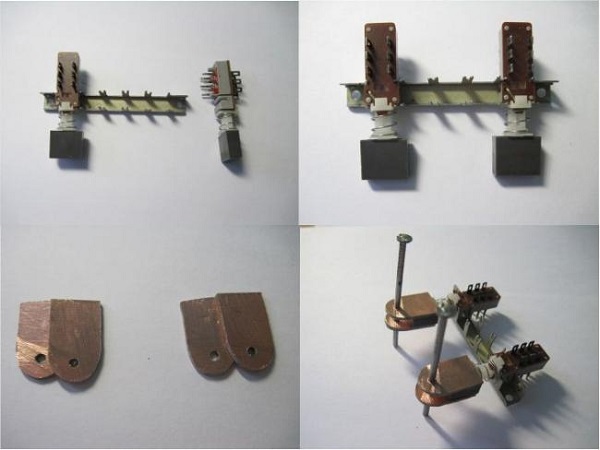
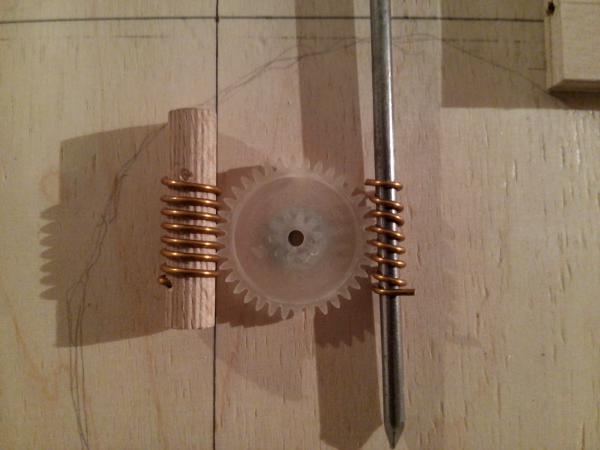
27 декабря 2014. Решил попробовать собрать червячную передачу для ходовой части робота-пылесоса. На фотках ранее я показывал, что сделать червяка можно из гвоздя и отрезка медной проволоки. Проблема оказалась в процессе припаивания проволоки к гвоздю. Паяльник у меня не очень мощный, поэтому дополнительно гвоздь прогревал на газовой горелке. Однако качественно припаять проволоку так и не получилось, поэтому взял круглый кусок деревяшки и намотал на него проволоку, витки пролил супер-клеем. Червяк получился вполне сносный. Не обращая внимания на овальность деревянной основы и вообще всего блока из фанеры механизм работал нормально, но блин очень медленно.
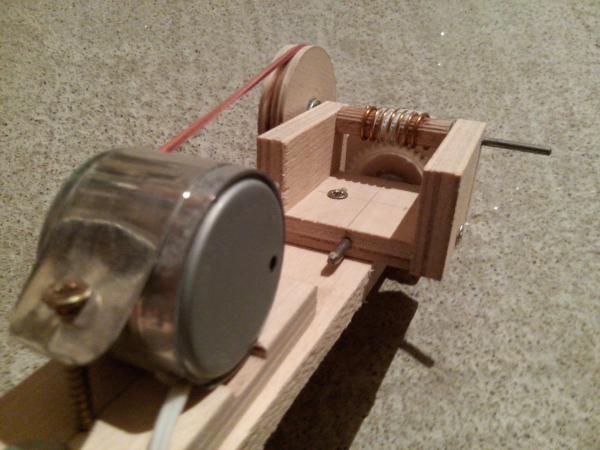
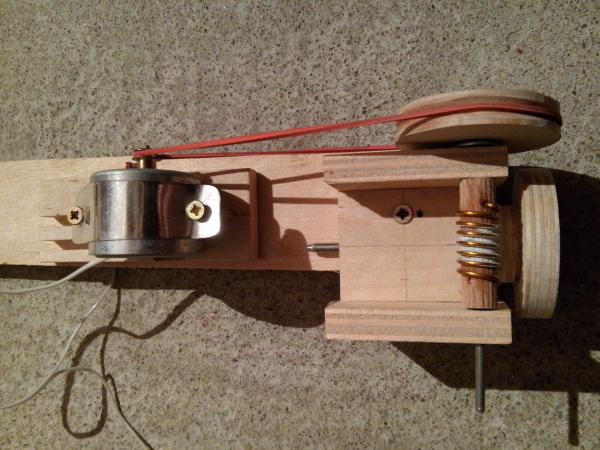
Было бы неплохо раздобыть готовые пластиковые червячные передачи, а пока отложим это всторонку.
Касаемо будущего потребления энергии моим роботом. Сейчас загвоздка с турбиной, что-то не хочет она сосать как положено даже при снятом фильтре тонкой очистки. Если для турбины использовать обычный коллекторный мотор и питать его напряжением в 12 вольт, то потреблять он будет около 0.6 ампера. Если использовать бесколекторный мотор, то он будет потреблять около одного ампера. Плюс для движения робота будет использовано два колекторых мотора и для щётки ещё один, каждый будет потреблять около 0.3 ампера. Электроника будет тоже что-то потреблять. Итого робот будет "кушать" примерно от 1.6 до 2 ампер, в пиках наверное до 2.5 ампер. Не знаю много это или нет, вроде как промышленные роботы потребляют три и более ампер.
Снова пересмотрел кучу видео и фото по запросу "принцип работы робота-пылесоса". Нашел классную фотку турбины от обычного бытового пылесоса. Прочитал на каком-то форуме, что чем длинее лопасти турбины, тем больший вакуум она может создать за счёт центробежной силы.

28 декабря 2014. Склеил сегодня ещё две турбины, отличаются только толщиной. Лопасти сделал как можно длинее. На фото ниже первая тонкая (5мм высота лопасти) турбина, в работе она очень тихая, но нифига не сосёт:)

Вторая турбина толще (15мм высота лопасти).

Ещё раз в гараже попробовал потаскать щетку по полу, мотор часто затыкается от нагрузки, щетина всё равно получилась очень жесткой, да и диаметр щётки не мешало бы уменьшить. Завтра при любой погоде иду покупать щетку с самой мягкой щетиной, также зайду в магазин с игрушками поищу машинки с червячным редуктором для ходовой части робота.
В гараже протестировал новую турбину с напряжением 12 вольт, подумал что 9 лопастей возможно мало. Дома склеил третью за день турбину с длинными лопастями и количеством 15 штук, фото прилагаю:

Закончился ещё один день. До нового года сделать пылесос уже не успею как планировал, однако хочется верить что всё будет хорошо:)
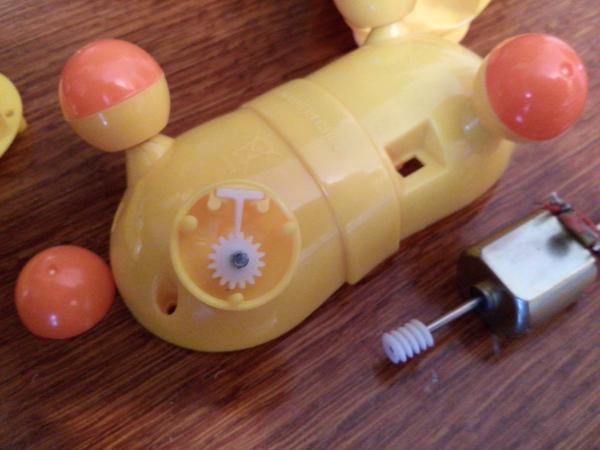
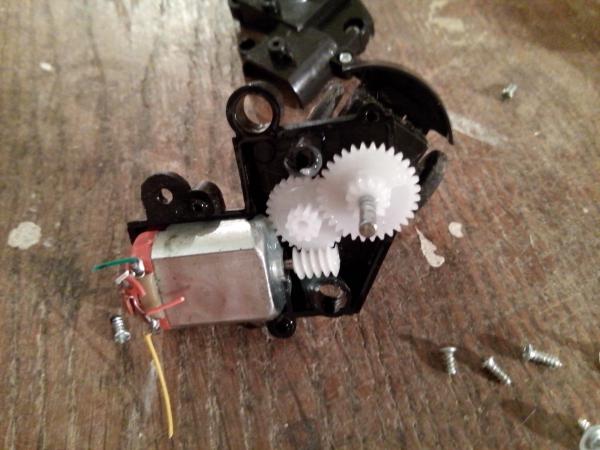
29 декабря 2014. Пошел сегодня в магазин с игрушками в поисках червячной передачи. По дороге вспомнил про игрушку дочери - конь. Этот конь дочери не очень нравился да и вобщем-то и мне он не очень:) Но зато у него внутри целых два червяка и 4+4 шестерни.


В магазин игрушек я всё таки заглянул, потом во второй и купил там машинку-перевёртыш. Машинку купил не столько за механизм, сколько за её колёса, они взбираются на любые поверхности. Внутри у машинки червячной передачи не оказалось. Колёса вполне возможно я использую для самодельного робота, а пока машинку отдал дочери - она в восторге:)


Днём пришла в голову мысль сделать робот-электровеник, т.е. конструкция таже что и сейчас, только отсутствует турбина, мусор просто собирается в отсек. Когда в магазине искал новую щетку с более мягким ворсом (её так и не купил) случайно увидел это:

Эту крышку я разумеется сразу купил. Это уже готовый корпус робота, по современному прозрачный и даже нет лишних элементов. А на самом деле это "Крышка для микроволновой печи" (диаметр 24.5 см), что ей накрывать и зачем не знаю, но робот должен получиться красивый:) Но об этом уже в другой статье.
Вечером разломал коника, вынул шестерни и прикрутил к своему роботу, получилось классно! Механизм занимает минимум пространства и достаточно силён для передвижения платфомы. Пока собрал не всё, поэтому фотки будут позже. А пока вынашиваю идею как сделать новую щётку, уменьшить её диаметр до 3-4 см и заменить редуктор с шестернями на червячный.
Кстати на заметку, червяка можно вынуть и из других игрушек. Так у нас валялся поломанный слон, но в принципе это не важно, главное это механизм, который во многих игрушках (машинках, танках и других) такой же, смотрите фотки:


Ах да, забыл написать про новую турбину, она оказалась заметно производительнее всех остальных. Для лучшего прохождения воздуха я ещё добавил конус в середину турбины.
05 января 2015. Несмотря на новогодние праздники все предыдущие дни я старался как-то продвинуться в работе. Очень много информации перечитал про 3D-принтеры, если бы был такой принтер в моём арсенале, то давно уже напечатал большую часть деталей. Пока в голове строю планы на будущее как собрать 3D-принтер своими руками.
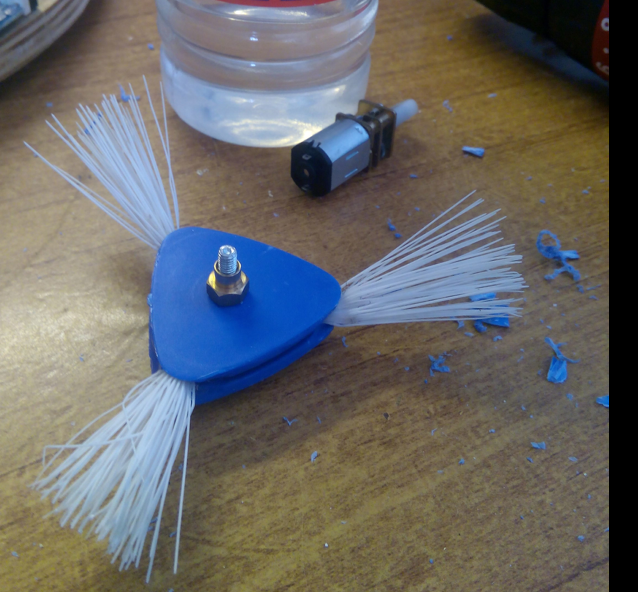
На сегодняшний день я сделал новую щётку. Взял деревянную палочку диаметром 10 мм и насверлил по спирали отверстий. В отверстия вставлял щетинки и запаивал их с обратной стороны выжигателем по дереву.

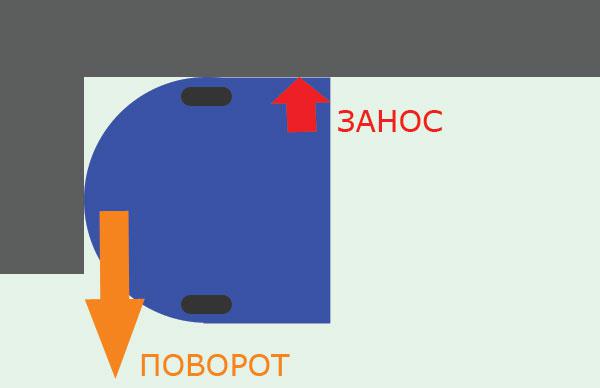
Собрал ходовую часть, пока не тестировал, сохнет клей. Новую щётку тоже поставил на место, получилось много косяков, без них никак, всётаки это мой первый робот. Кстати, я отказался от прямоугольной задней части и сделал основу под круглый корпус. Связано моё решение с переосмыслением движения робота, если представить что робот движется вдоль стены и во что-то упирается, то чтобы повернуть ему придётся сделать манёвр с движением назад, потому что квадратный зад будет заносить на стену.
Много времени я потратил на поиск решения для "зрения" робота. Механический бампер меня не очень устраивает, он портит внешний хоть и является самой простой схемой определения препятствий. Я остановился на инфракрасном датчике. Пока нет возможности собрать датчик из-за отсутствия инфракрасных фототранзисторов.
07 января 2015. Вчера до часа ночи собирал робота чтобы хоть как-то его протестировать, поиграться:) В качестве "мозга" используется плата Arduino Pro Mini + моторшилд на микросхемах L293E с обвязкой (эту плату я использовал в своём первом проекте по управлению моторами онлайн через Интернет). Управление осуществляется с пульта от телевизора. Короткое видео:
Конструкция выглядит жидко, на самом деле так и есть, почти все механизмы еле дышат. Сегодня я понял на сколько казалось бы простой робот так сложно сделать. На текущий момент почти во всех узлах у меня проблемы, требуется глобальная переделка почти всего.
Привод колёс на червячной передаче по скорости получился что надо, но его исполнение оставляет желать лучшего. Часть привода размещается в отсеке, где будет движение воздуха с мусором, это долго работать не будет. На колёсах я хотел просверлить отверстия, которые служили бы дополнительным датчиком движения. С одной стороны колеса будет располагаться ИК-светодиод, с другой ИК-фототранзистор. Эта схема при движении робота будет пульсировать, если импульсов нет, значит робот упёрся во что-то и не движется.
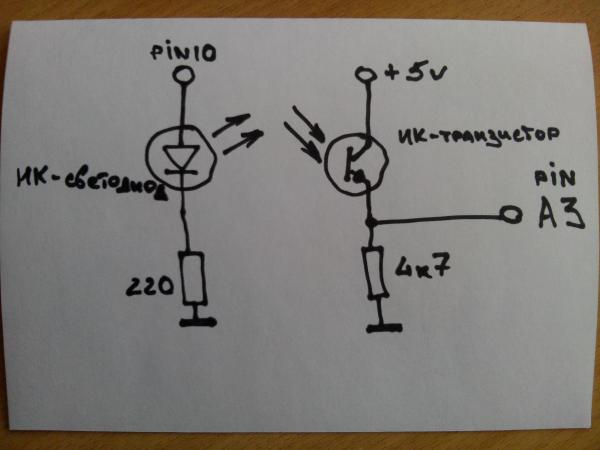
Для датчиков приближения я купил ИК-светодиоды и ИК-фототранзисторы, но после тестирования такого ИК-бампера стало ясно, что идея плохая. Датчик реагирует на солнечный свет, а чёрные предметы вовсе не видит. Конструкиция имеет право на жизнь, но в более простых самоделках. Кому интересна схема делюсь:

Если к датчику близко поднести руку, то на макетной плате загорается светодиод.
Также я попробовал ультразвуковой датчик. Он прекрасно измеряет расстояние, но только методом "в лоб", если плоскость объекта находится под углом, то показания искажаются. Вобщем даже с таким датчиком бампер у робота нормально работать не будет.
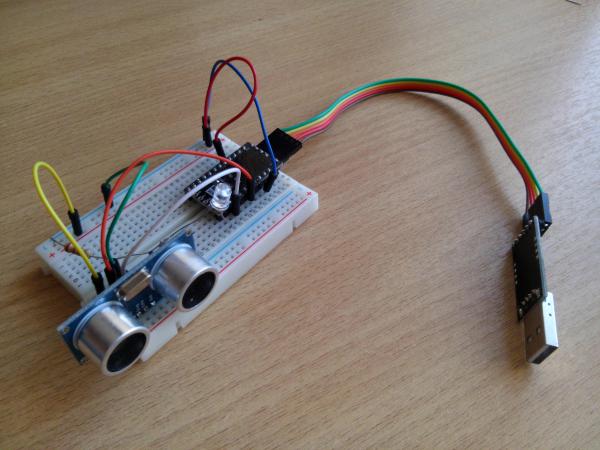
Для управления с пульта использован ИК-приёмник TSOP, какой маркировки не знаю, в принципе можно использовать любой попавшийся. Управлять можно с любого пульта, даже с мобильного телефона, но перед этим необходимо узнать коды нажимаемых кнопок на пульте. В скетче простая схема, которая отправляет код кнопки в монитор порта при нажатии на пульте. Пример подключения и скетч ниже:

Что касается щётки для подметания, получилась она отлично, ширина почти 21 см, при корпусе 25 см. Есть нюансы: ворсинки не восстанавливаются, если их примять. Приводной механизм ничем не закрыт, намотает волос за 3 минуты работы и заступорит. Щётка несъёмная. Мотор очень слабый, но количество оборотов очень даже подходящее, на столе метёт очень эффектно.


Сейчас этот робот-пылесос будет разобран и переосмыслен. Скорее всего диаметр корпуса увеличится на 3 см. Изначально колёса я думал сделать на независимой подвеске, чтобы прятались если вдруг кто-то наступит на робота. Привод колёс всётаки сделаю на шестернях, вместо червяка. Ворс для щётки нужно поискать другой, более эластичный и чтобы держал свою форму. Бампер видимо придётся делать механический. Много вопросов по всасывающей турбине.
Несмотря на все недоработки робот понравился жене, а дочь вообще в восторге:)
Продолжение следует. Так часто писать про робота больше не буду, но фото и видео отчёты хотя бы раз в месяц постараюсь публиковать.
Март 2015. Купил электровеник.
Робот пылесос ещё в проекте!
Сейчас популярность роботизированных домашних уборщиков все возрастает с каждым днем. Это обосновано тем, что данные устройства способны поддерживать покрытия вашего пола в чистоте и при этом не отнимать у вас времени.
Их главным отличием от управляемых человеком собратьев является то, что очистка поверхности, перемещение и ориентирование в пространстве осуществляются устройством самостоятельно. Этого удалось достичь благодаря наличию специальных датчиков, которые контролируют смену режима работы, перемещение и подзарядку пылесоса.
Основная проблема заключается в том, что приобрести робот-пылесос на рынке сейчас достаточно проблематично. Далеко не везде удается подобрать подходящую модель, да и ценовая политика некоторых реализаторов устраивает далеко не всех. Однако не стоит отчаиваться. У вас всегда есть возможность создать самодельный робот-пылесос. Само собой, сделать такое устройство своими руками и в домашних условиях - это весьма длительный процесс, который потребует терпения, определенного набора материалов и инструментов, а также навыков работы с подобного рода техникой. Схема создания робота-пылесоса в домашних условиях вполне постижима даже для любителя. Однако в процесс создания подобного рода механизмов необходимо вникнуть и выяснить все нюансы предстоящей операции. В противном случае вы лишь зря потратите время и средства.
 Робот-пылесос своими руками
Робот-пылесос своими руками
Описание самодельного робота пылесоса
Если вы хотите создать механизм, который будет идеально подходить для очистки поверхностей пола в вашем доме, вам следует внимательно соблюдать все правила, которые предписывает схема сборки, представленная в следующем пункте.
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;

- инфракрасные датчики имеют 4 выхода подключения к системе «Ардуино». При этом обычный режим работы подразумевает выдачу логической единицы, а ситуация, в которой хотя бы один из датчиков системы срабатывает - логический ноль;
- если ИК-датчик не сработал, а пылесос тем не менее наткнулся на какое-либо препятствие, его бампер нажмет на переключатель, что спровоцирует откат устройства на несколько сантиметров назад. После этого будет произведен разворот, а работа продолжится. Переключатели при этом нужны достаточно мощные, чтобы своевременно устанавливать бампер в исходное положение;
- мотор, отвечающий за движение передней щетки, подключается в Arduino через MOSFET. При этом в том случае, когда робот-пылесос находится в движении, щетка вращается достаточно медленно для того, чтобы пыль, грязь и мусор не разбрасывались по комнате, а, наоборот, собирались вместе и втягивались в жерло. А если робот находится возле стены или угла, щетка ускоряет темп своей работы, так как большинство пыли и грязи как раз и скапливается вдоль плинтусов;
- питание робота пылесоса осуществляют 4 литийионных аккумулятора, а также понижающий преобразователь переменного тока. Каждая пара вышеупомянутых литийионных аккумуляторов подключена последовательно;
- основание устройства изготовлено из высокопрочной фанеры;
- конструкция устройства подразумевает наличие 3 шариковых колес;
- все щетки робота-пылесоса изготовлены из достаточно жесткой лески.
Схема сборки робота-пылесоса в домашних условиях
Чтобы правильно сделать робот-пылесос своими руками, необходимо придерживаться следующего алгоритма (схема должна выполняться в четко указанной последовательности):
- Загрузить необходимое программное обеспечение. Если вы хотите сделать свой робот-пылесос максимально похожим на заводские аналоги (исходя из выполняемых функций), вам нужно будет загрузить на микроконтроллер «Ардуино» необходимое программное обеспечение. Это можно сделать при помощи обыкновенного персонального компьютера - достаточно лишь загрузить код на плату «Ардуино».
- Закрепить основные компоненты. Чтобы средства передвижения робота-пылесоса, кулер, микросхемы, аккумуляторы и вся прочая начинка устройства были надежно закреплены, вам потребуется фанерная основа. Она же по совместительству будет днищем вашего пылесоса. Туда же крепятся предварительно склеенные между собой при помощи суперклея турбина и емкость для сбора отходов. Также контейнер должен быть оборудован специальной трубкой, через которую будет выводиться выдуваемый воздух. Она должна быть защищена плотной тканью, которая послужит средством фильтрации. Кулер должен быть последовательно склеен со всеми сервоприводами, после чего посажен на все ту же фанерную площадку, на которой к тому времени уже должны быть монтированы микросхемы и аккумуляторы для подпитки устройства. Колеса для робота пылесоса могут быть куплены на рынке (однако вы можете предпринять попытку сделать их своими руками из консервной банки).
 Механическая часть робота-пылесоса
Механическая часть робота-пылесоса
- Установить бампер. В этой модели он изготавливается из поливинилхлорида. Однако возможны и металлические аналоги. В любом случае при столкновении он должен физически воздействовать на переключатель, который заставит аппарат двигаться в другую сторону. Также стоит отметить, что после столкновения бампер должен возвращаться на первоначальное место.
- Установить корпус. Чтобы все содержимое конструкции было надежно защищено, лучше всего использовать корпус из поливинилхлорида. При этом на нем можно сделать надрезы, чтобы он лучше снимался. Крышка корпуса крепится при помощи магнитов. В идеале их должно быть не менее 8 (приветствуются вариации, в которых использовано большее их количество).
Необходимые материалы
Чтобы сделать робот-пылесос своими руками, вам потребуются следующие материалы:
- «Ардуино Про Мини» - главный мозг и информационный центр всей конструкции.
- Драйвер моторов робота-пылесоса серии Л298Н.
- Понижающий преобразователь переменного тока.
- Модуль с мосфетом, посредством которого будет осуществляться контроль над темпом работы передней щетки устройства.
- 4 инфракрасных датчика, которые будут фиксировать наличие препятствий на пути робота пылесоса.
- Пара переключателей, которые будут изменять направление движение устройства при столкновении.
- 3 шарообразных колеса.
 Колеса для самодельного робота-пылесоса
Колеса для самодельного робота-пылесоса
- Мотор, обеспечивающий вращение щетки в различных режимах.
- Мотор высокой мощности, обеспечивающий нормальное функционирование турбины.
- 4 литийионных аккумулятора, а также средство контроля над ними.
- Фанерное основание нужного размера.
- Корпус из поливинилхлорида нужного размера.
- 8 пар магнитов для крепления.
- Провода, кабели, переключатели и прочие элементы электрической сети.
способен сам перемещаться по комнате, объезжать препятствия, а также собирать мусор. Для облегчения конструкции и простоты сборки в качестве материала для основы используется картон.

Материалы и инструменты для изготовления:
- плотный картон (нужно много кусков);
- arduino (автор использовал аналог за 210 р.);
- небольшая макетка стоимостью 80 р.;
- два ультразвуковых дальномера (стоимость 300 р.);
- контроллер моторчиков (80 р.);
- два мотор-редуктора с колесами (300 р.);
- блок аккумуляторов с контроллером заряда на 18 В;
- несколько метров витой пары;
- турбина от старого пылесоса;
- кулер от компьютера.

Процесс изготовления:
Шаг первый. Создаем поворотную платформу для робота
Для своей первой самоделки автор использовал танк из игры "Танковый бой", из игрушки были выброшены все лишние детали, остался только корпус, а также двигатели и колеса. После этого был установлен Arduino UNO, драйвер двигателей и ультразвуковой дальномер. В качестве источника питания использовались три литиевые батареи по 3.7 В.
Такая конструкция имела ряд минусов. К примеру, из-за того, что колеса находились сзади платформы, у робота возникали проблемы при повороте, робот часто буксовал.
Также из-за очень большой скорости передвижения робот порой не успевал реагировать на сигналы дальномера и врезался.


Все проблемы были решены путем сборки новой платформы из картона. Для этого нужно вырезать 2 круга диаметром 30 см, а затем склеить их поперек волокон. В итоге получается довольно прочная конструкция на изгиб. Что касается моторчиков и редукторов, то они были взяты из предыдущей самоделки.
Шаг второй. Создаем сенсоры
Изначально робот ориентировался за счет дальномеров, но автору их работа не понравилась и в итоге было решено от их избавиться. На их смену пришли контактные бампера, при этом робот стал вести себя адекватнее, да и вложений при этом требуется меньше.

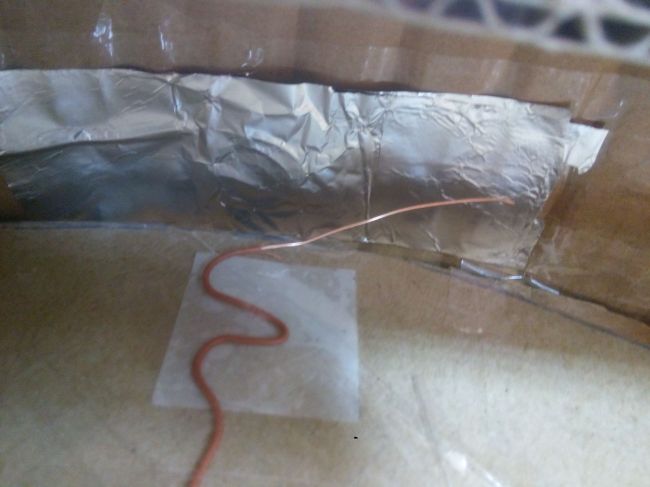

Контактные бампера изготавливаются очень просто. Нужно взять картон и на одну его сторону приклеить фольгу, это будет первым контактом. К этой фольге нужно подать напряжение +5 В. Напротив платформы нужно установить изогнутый проводок от витой пары, он подключается через резистор, благодаря этому ложных срабатываний будет меньше. Когда робот будет во что-то врезаться, то будут замыкаться контакты, и затем электроника будет разворачивать робота в другом случайном направлении.
Шаг третий. Делаем пылесос и пылесборник
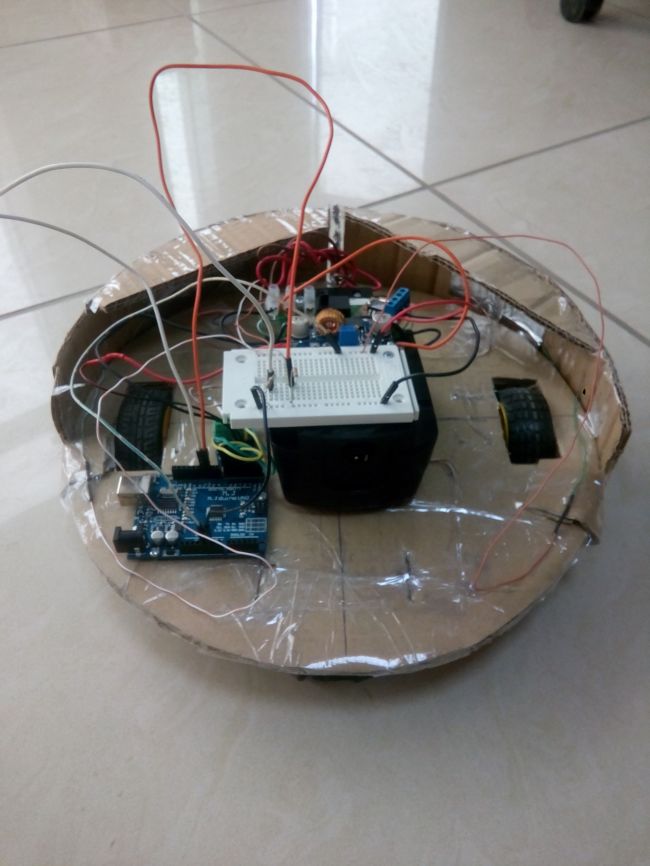
Благодаря таким материалам как картон и скотч можно быстро собрать практически любой макет. Для работы турбины используется источник питания в 18 Вольт, напрямую от батареи. При такой нагрузке кулеры греются, но работают.


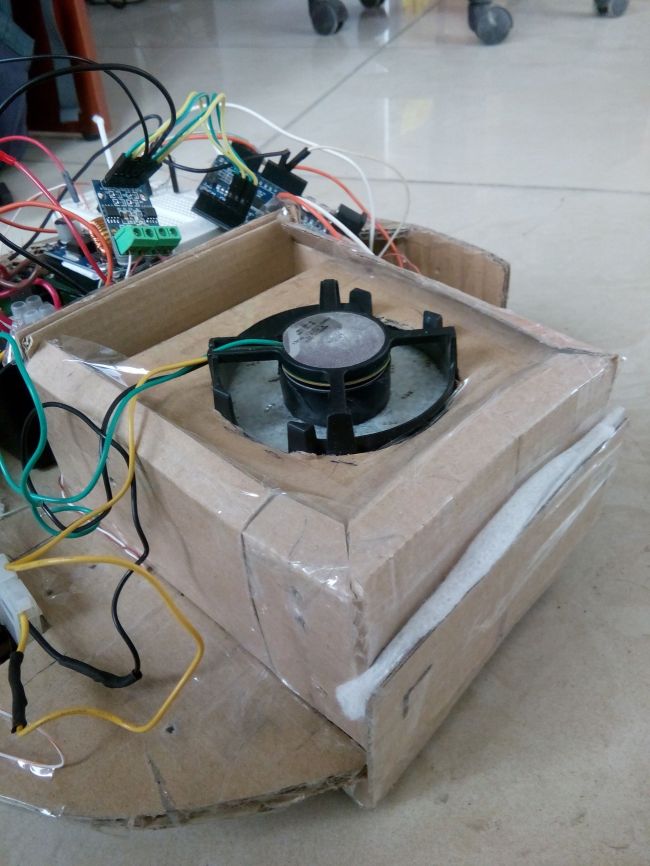



Для изготовления турбины берется кулер от компьютера и затем от него отламываются все лопасти. Далее на кулер крепится турбина от пылесоса, ее нужно приклеить суперклеем. Самое главное здесь - приклеить точно, не должно быть дисбаланса. Без нагрузки и питании 18 Вольт кулер выдает порядка 2600 RPM, что создает отличную тягу. В заключении вся конструкция собирается так, как можно увидеть на фото и после этого робота можно испытывать.
Что касается алгоритма работы, то он очень простой. Если робот во что-то врезается, он затем разворачивается на случайный угол.
В будущем автор планирует сделать платформу из фанеры, чтобы она была прочнее. Еще в планах установка двух щеток спереди для более эффективной сборки мусора. Выдуваемый воздух можно направить под платформу, чтобы пыль собиралась эффективнее.
За прошедшее время робот серьезно изменился. Как и обещал, хочу поделиться доработакми.
Итак, что было сделано:
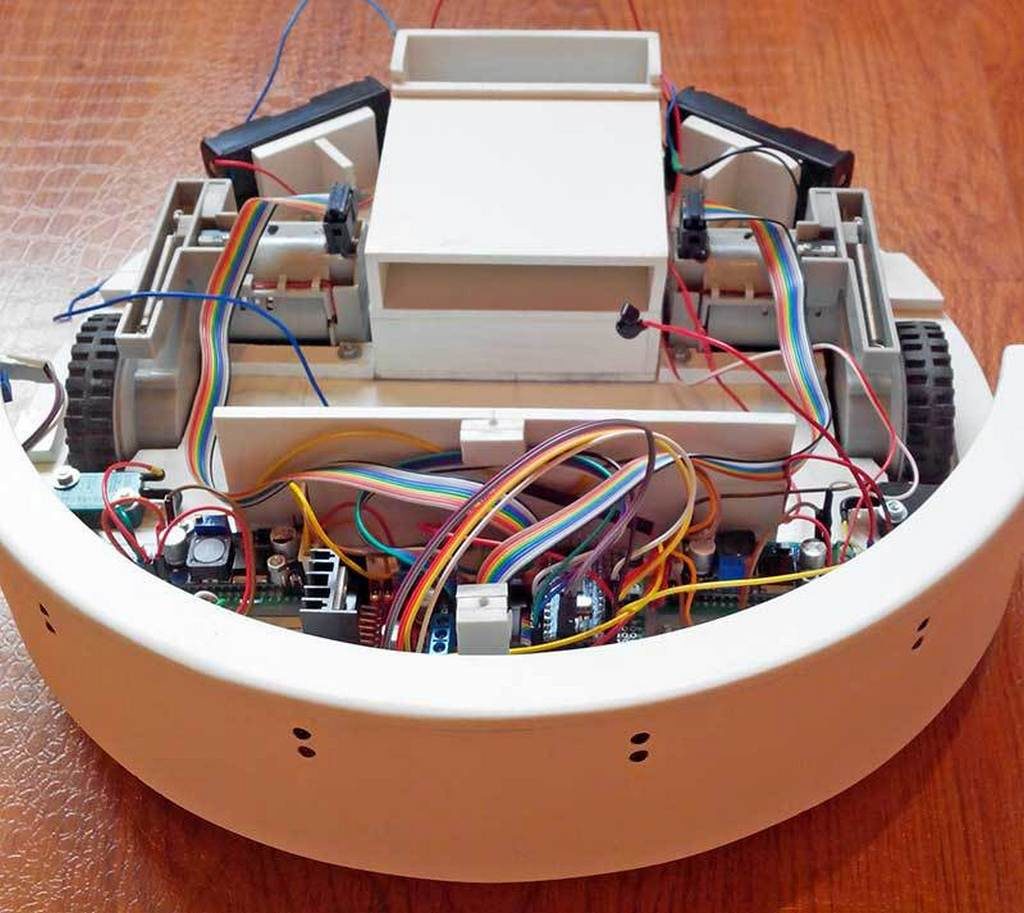
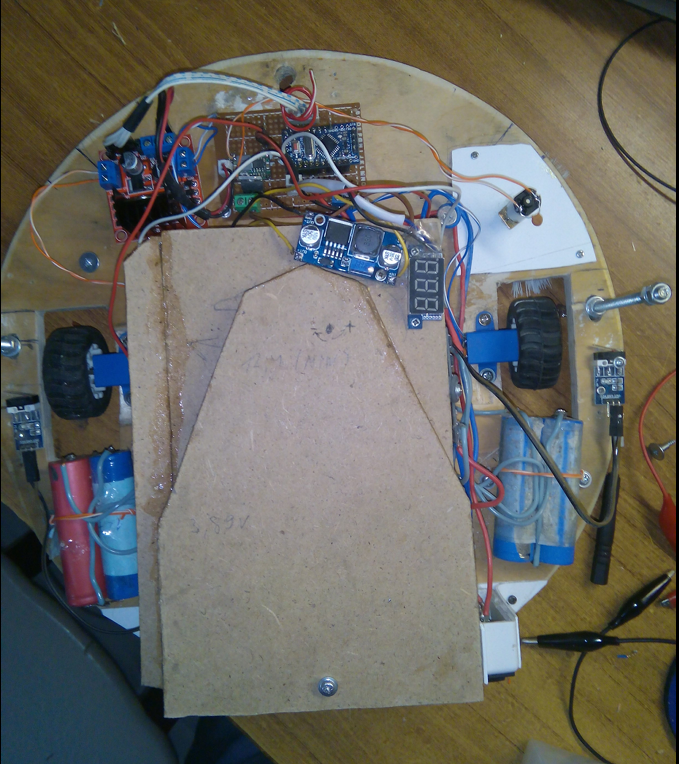
1. Вместо картонного основания теперь круг из фанеры 9мм - это позволило хорошо закреплять все детали робота, используя нормальные шурупы, а не стяжки.
2. Следующим попал под переделку блок пылесоса. Мотор и турбину оставил ту же, но разместил их не «блином», а вынес турбину в переднюю часть корпуса. Такого я у самоделок еще не встречал. Эта хитрость позволила уменьшить высоту пылесоса до 8,5 см и он теперь пролезает даже под некоторые шкафы. Сам же корпус пылесоса собран заново из тонкого ДВП.
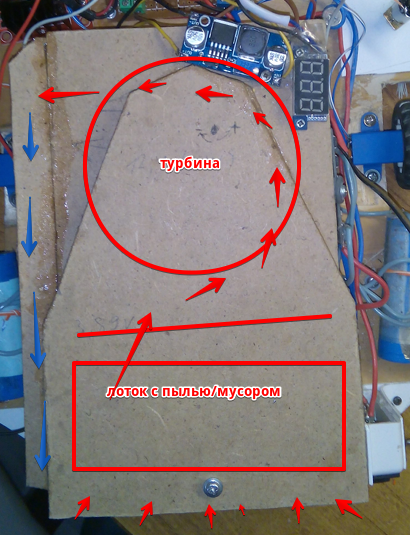
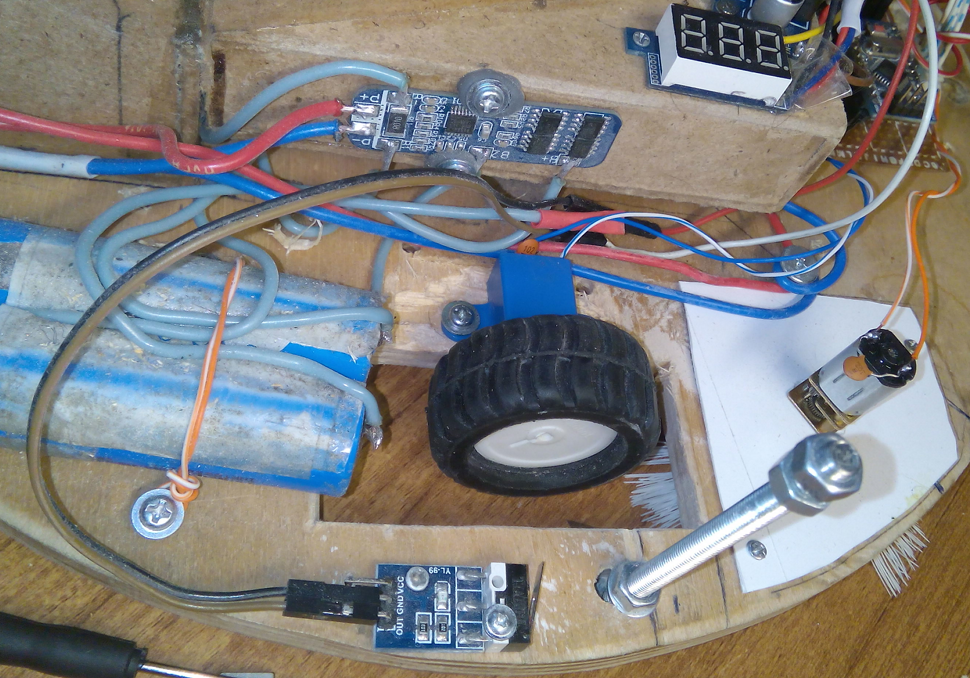
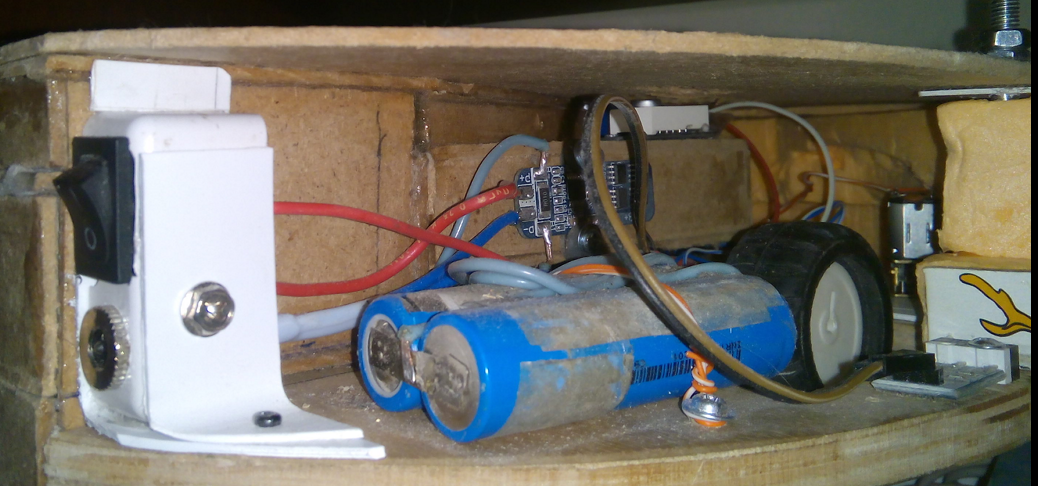
«Отработанный» воздух пришлось выводить за пределы корпуса из-за того, что он даже после фильтра достаточно пыльный, и вся эта пыль выдувалась прямехонько на левый мотор. Также на корпус «временно» повесил плату DC/DC step UP для повышения напряжения питания турбины. Входное напряжение +12V, но этого маловато для уверенного всасывания средней/крупной грязи. При напряжении около +16V тяга уже достаточна. Можно поднять и выше, но тогда и увеличится шумность. Также на корпус пылесоса (опять же «временно») закрепил вольтметр, чтоб примерно определить текущий заряд батарей.
3. Следующими под раздачу попали «желтые» мотор-редукторы. Не подходят они из-за большой шумности. Да и уменьшить скорость хода на этих моторах без потери в крутящем моменте у меня нормально не получилось - робот носился по комнате, пугая кошку)
На просторах интернета наткнулся на маленькие моторы N20, решил использовать их.
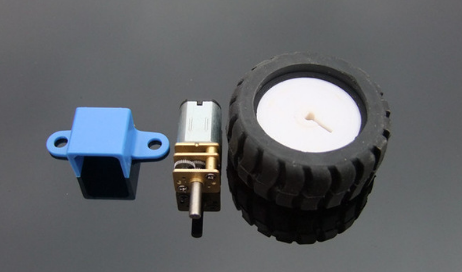
Но с ними приключились 2 неприятности: продавец почему-то прислал мне оба мотора с разным передаточным числом, а при установке их на платформу, они оказались очень шумными, даже хуже, чем те китайские желтые мотор-редукторы. Вероятно шум можно уменьшить, если сделать некий «демпфер» между мотором к корпусом, но я пока остановился на поиске других моторов, хоть с этими робот и перестал носиться по комнатам как угорелый) Ну и пока проводил эксперименты, спалил маленький контроллер мотор-редукторов, в итоге поставил-таки L298N.

5. Передний бампер. С ним пришлось повозиться, испробовав много разных вариантов. В итоге остановился на пеноплексе

Также в качестве датчиков стенки поставил самые простые концевики. Никаких дополнительных пружинок не понадобилось - кнопочки достаточно упруги, чтоб возвращать бампер обратно после соприкосновения с препятствием.
6. Установлен BMS-контроллер на 3 литиевых банки. Изначально хотел поставить 4, но BMS на 4 банки пришел бракованным, пока, опять же «временно», оставил так

В итоге получился неплохой бюджетный, простой, но очень шумный робот-пылесос.
Если читатели подскажут, какие мотор/редукторы лучше использовать, буду признателен. Нужны нешумные, с питанием 3-12v, примерно 60 оборотов вала в минуту. Спасибо.







