In this article we will cover:
- what are collinear vectors;
- what are the conditions for collinearity of vectors;
- what properties of collinear vectors exist;
- what is the linear dependence of collinear vectors.
Collinear vectors are vectors that are parallel to one line or lie on one line.
Example 1
Conditions for collinearity of vectors
Two vectors are collinear if any of the following conditions are true:
- condition 1 . Vectors a and b are collinear if there is a number λ such that a = λ b;
- condition 2 . Vectors a and b are collinear with equal coordinate ratios:
a = (a 1 ; a 2) , b = (b 1 ; b 2) ⇒ a ∥ b ⇔ a 1 b 1 = a 2 b 2
- condition 3 . Vectors a and b are collinear provided that the cross product and the zero vector are equal:
a ∥ b ⇔ a, b = 0
Note 1
Condition 2 not applicable if one of the vector coordinates is zero.
Note 2
Condition 3 applies only to those vectors that are specified in space.
Examples of problems to study the collinearity of vectors
Example 1We examine the vectors a = (1; 3) and b = (2; 1) for collinearity.
How to solve?
In this case, it is necessary to use the 2nd collinearity condition. For given vectors it looks like this:
The equality is false. From this we can conclude that vectors a and b are non-collinear.
Answer : a | | b
Example 2
What value m of the vector a = (1; 2) and b = (- 1; m) is necessary for the vectors to be collinear?
How to solve?
Using the second collinearity condition, vectors will be collinear if their coordinates are proportional:
This shows that m = - 2.
Answer: m = - 2 .
Criteria for linear dependence and linear independence of vector systems
TheoremA system of vectors in a vector space is linearly dependent only if one of the vectors of the system can be expressed in terms of the remaining vectors of this system.
Proof
Let the system e 1 , e 2 , . . . , e n is linearly dependent. Let us write a linear combination of this system equal to the zero vector:
a 1 e 1 + a 2 e 2 + . . . + a n e n = 0
in which at least one of the combination coefficients is not equal to zero.
Let a k ≠ 0 k ∈ 1 , 2 , . . . , n.
We divide both sides of the equality by a non-zero coefficient:
a k - 1 (a k - 1 a 1) e 1 + (a k - 1 a k) e k + . . . + (a k - 1 a n) e n = 0
Let's denote:
A k - 1 a m , where m ∈ 1 , 2 , . . . , k - 1 , k + 1 , n
In this case:
β 1 e 1 + . . . + β k - 1 e k - 1 + β k + 1 e k + 1 + . . . + β n e n = 0
or e k = (- β 1) e 1 + . . . + (- β k - 1) e k - 1 + (- β k + 1) e k + 1 + . . . + (- β n) e n
It follows that one of the vectors of the system is expressed through all other vectors of the system. Which is what needed to be proven (etc.).
Adequacy
Let one of the vectors be linearly expressed through all other vectors of the system:
e k = γ 1 e 1 + . . . + γ k - 1 e k - 1 + γ k + 1 e k + 1 + . . . + γ n e n
We move the vector e k to the right side of this equality:
0 = γ 1 e 1 + . . . + γ k - 1 e k - 1 - e k + γ k + 1 e k + 1 + . . . + γ n e n
Since the coefficient of the vector e k is equal to - 1 ≠ 0, we get a non-trivial representation of zero by a system of vectors e 1, e 2, . . . , e n , and this, in turn, means that this system of vectors is linearly dependent. Which is what needed to be proven (etc.).
Consequence:
- A system of vectors is linearly independent when none of its vectors can be expressed in terms of all other vectors of the system.
- A system of vectors that contains a zero vector or two equal vectors is linearly dependent.
Properties of linearly dependent vectors
- For 2- and 3-dimensional vectors, the following condition is satisfied: two linearly dependent vectors are collinear. Two collinear vectors are linearly dependent.
- For 3-dimensional vectors, the following condition is satisfied: three linearly dependent vectors are coplanar. (3 coplanar vectors are linearly dependent).
- For n-dimensional vectors, the following condition is satisfied: n + 1 vectors are always linearly dependent.
Examples of solving problems involving linear dependence or linear independence of vectors
Example 3Let's check the vectors a = 3, 4, 5, b = - 3, 0, 5, c = 4, 4, 4, d = 3, 4, 0 for linear independence.
Solution. Vectors are linearly dependent because the dimension of vectors is less than the number of vectors.
Example 4
Let's check the vectors a = 1, 1, 1, b = 1, 2, 0, c = 0, - 1, 1 for linear independence.
Solution. We find the values of the coefficients at which the linear combination will be equal to the zero vector:
x 1 a + x 2 b + x 3 c 1 = 0
We write the vector equation in linear form:
x 1 + x 2 = 0 x 1 + 2 x 2 - x 3 = 0 x 1 + x 3 = 0
We solve this system using the Gaussian method:
1 1 0 | 0 1 2 - 1 | 0 1 0 1 | 0 ~
From the 2nd line we subtract the 1st, from the 3rd - the 1st:
~ 1 1 0 | 0 1 - 1 2 - 1 - 1 - 0 | 0 - 0 1 - 1 0 - 1 1 - 0 | 0 - 0 ~ 1 1 0 | 0 0 1 - 1 | 0 0 - 1 1 | 0 ~
From the 1st line we subtract the 2nd, to the 3rd we add the 2nd:
~ 1 - 0 1 - 1 0 - (- 1) | 0 - 0 0 1 - 1 | 0 0 + 0 - 1 + 1 1 + (- 1) | 0 + 0 ~ 0 1 0 | 1 0 1 - 1 | 0 0 0 0 | 0
From the solution it follows that the system has many solutions. This means that there is a non-zero combination of values of such numbers x 1, x 2, x 3 for which the linear combination of a, b, c equals the zero vector. Therefore, the vectors a, b, c are linearly dependent.
If you notice an error in the text, please highlight it and press Ctrl+Enter
Introduced by us linear operations on vectors make it possible to create various expressions for vector quantities and transform them using the properties set for these operations.
Based on a given set of vectors a 1, ..., a n, you can create an expression of the form
where a 1, ..., and n are arbitrary real numbers. This expression is called linear combination of vectors a 1, ..., a n. The numbers α i, i = 1, n, represent linear combination coefficients. A set of vectors is also called system of vectors.
In connection with the introduced concept of a linear combination of vectors, the problem arises of describing a set of vectors that can be written as a linear combination of a given system of vectors a 1, ..., a n. In addition, there are natural questions about the conditions under which there is a representation of a vector in the form of a linear combination, and about the uniqueness of such a representation.
Definition 2.1. Vectors a 1, ..., and n are called linearly dependent, if there is a set of coefficients α 1 , ... , α n such that
α 1 a 1 + ... + α n а n = 0 (2.2)
and at least one of these coefficients is non-zero. If the specified set of coefficients does not exist, then the vectors are called linearly independent.
If α 1 = ... = α n = 0, then, obviously, α 1 a 1 + ... + α n a n = 0. With this in mind, we can say this: vectors a 1, ..., and n are linearly independent if it follows from equality (2.2) that all coefficients α 1 , ... , α n are equal to zero.
The following theorem explains why the new concept is called the term "dependence" (or "independence"), and provides a simple criterion for linear dependence.
Theorem 2.1. In order for the vectors a 1, ..., and n, n > 1, to be linearly dependent, it is necessary and sufficient that one of them is a linear combination of the others.
◄ Necessity. Let us assume that the vectors a 1, ..., and n are linearly dependent. According to Definition 2.1 of linear dependence, in equality (2.2) on the left there is at least one non-zero coefficient, for example α 1. Leaving the first term on the left side of the equality, we move the rest to the right side, changing their signs, as usual. Dividing the resulting equality by α 1, we get
a 1 =-α 2 /α 1 ⋅ a 2 - ... - α n /α 1 ⋅ a n
those. representation of vector a 1 as a linear combination of the remaining vectors a 2, ..., a n.
Adequacy. Let, for example, the first vector a 1 can be represented as a linear combination of the remaining vectors: a 1 = β 2 a 2 + ... + β n a n. Transferring all terms from the right side to the left, we obtain a 1 - β 2 a 2 - ... - β n a n = 0, i.e. a linear combination of vectors a 1, ..., a n with coefficients α 1 = 1, α 2 = - β 2, ..., α n = - β n, equal to zero vector. In this linear combination, not all coefficients are zero. According to Definition 2.1, the vectors a 1, ..., and n are linearly dependent.
The definition and criterion for linear dependence are formulated to imply the presence of two or more vectors. However, we can also talk about a linear dependence of one vector. To realize this possibility, instead of “vectors are linearly dependent,” you need to say “the system of vectors is linearly dependent.” It is easy to see that the expression “a system of one vector is linearly dependent” means that this single vector is zero (in a linear combination there is only one coefficient, and it should not be equal to zero).
The concept of linear dependence has a simple geometric interpretation. The following three statements clarify this interpretation.
Theorem 2.2. Two vectors are linearly dependent if and only if they collinear.
◄ If vectors a and b are linearly dependent, then one of them, for example a, is expressed through the other, i.e. a = λb for some real number λ. According to definition 1.7 works vectors per number, vectors a and b are collinear.
Let now vectors a and b be collinear. If they are both zero, then it is obvious that they are linearly dependent, since any linear combination of them is equal to the zero vector. Let one of these vectors not be equal to 0, for example vector b. Let us denote by λ the ratio of vector lengths: λ = |a|/|b|. Collinear vectors can be unidirectional or oppositely directed. In the latter case, we change the sign of λ. Then, checking Definition 1.7, we are convinced that a = λb. According to Theorem 2.1, vectors a and b are linearly dependent.
Remark 2.1. In the case of two vectors, taking into account the criterion of linear dependence, the proven theorem can be reformulated as follows: two vectors are collinear if and only if one of them is represented as the product of the other by a number. This is a convenient criterion for the collinearity of two vectors.
Theorem 2.3. Three vectors are linearly dependent if and only if they coplanar.
◄ If three vectors a, b, c are linearly dependent, then, according to Theorem 2.1, one of them, for example a, is a linear combination of the others: a = βb + γc. Let us combine the origins of vectors b and c at point A. Then the vectors βb, γс will have a common origin at point A and along according to the parallelogram rule, their sum is those. vector a will be a vector with origin A and the end, which is the vertex of a parallelogram built on component vectors. Thus, all vectors lie in the same plane, i.e., coplanar.
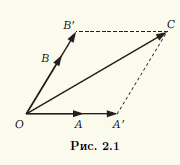
Let vectors a, b, c be coplanar. If one of these vectors is zero, then it is obvious that it will be a linear combination of the others. It is enough to take all coefficients of a linear combination equal to zero. Therefore, we can assume that all three vectors are not zero. Compatible started of these vectors at a common point O. Let their ends be points A, B, C, respectively (Fig. 2.1). Through point C we draw lines parallel to lines passing through pairs of points O, A and O, B. Designating the points of intersection as A" and B", we obtain a parallelogram OA"CB", therefore, OC" = OA" + OB". Vector OA" and the non-zero vector a = OA are collinear, and therefore the first of them can be obtained by multiplying the second by a real number α:OA" = αOA. Similarly, OB" = βOB, β ∈ R. As a result, we obtain that OC" = α OA. + βOB, i.e. vector c is a linear combination of vectors a and b. According to Theorem 2.1, vectors a, b, c are linearly dependent.
Theorem 2.4. Any four vectors are linearly dependent.
◄ We carry out the proof according to the same scheme as in Theorem 2.3. Consider arbitrary four vectors a, b, c and d. If one of the four vectors is zero, or among them there are two collinear vectors, or three of the four vectors are coplanar, then these four vectors are linearly dependent. For example, if vectors a and b are collinear, then we can make their linear combination αa + βb = 0 with non-zero coefficients, and then add the remaining two vectors to this combination, taking zeros as coefficients. We obtain a linear combination of four vectors equal to 0, in which there are non-zero coefficients.
Thus, we can assume that among the selected four vectors, no vectors are zero, no two are collinear, and no three are coplanar. Let us choose point O as their common beginning. Then the ends of the vectors a, b, c, d will be some points A, B, C, D (Fig. 2.2). Through point D we draw three planes parallel to the planes OBC, OCA, OAB, and let A", B", C" be the points of intersection of these planes with straight lines OA, OB, OS, respectively. We obtain a parallelepiped OA" C "B" C" B"DA", and the vectors a, b, c lie on its edges emerging from the vertex O. Since the quadrilateral OC"DC" is a parallelogram, then OD = OC" + OC" In turn, the segment OC" is a diagonal. parallelogram OA"C"B", so OC" = OA" + OB" and OD = OA" + OB" + OC" .

It remains to note that the pairs of vectors OA ≠ 0 and OA" , OB ≠ 0 and OB" , OC ≠ 0 and OC" are collinear, and, therefore, it is possible to select the coefficients α, β, γ so that OA" = αOA , OB" = βOB and OC" = γOC. We finally get OD = αOA + βOB + γOC. Consequently, the OD vector is expressed through the other three vectors, and all four vectors, according to Theorem 2.1, are linearly dependent.
a 1 = { 3, 5, 1 , 4 }, a 2 = { –2, 1, -5 , -7 }, a 3 = { -1, –2, 0, –1 }.
Solution. We are looking for a general solution to the system of equations
a 1 x 1 + a 2 x 2 + a 3 x 3 = Θ
Gauss method. To do this, we write this homogeneous system in coordinates:
System Matrix
The allowed system has the form: ![]() (r A = 2, n= 3). The system is cooperative and uncertain. Its general solution ( x 2 – free variable): x 3 = 13x 2 ; 3x 1 – 2x 2 – 13x 2 = 0 => x 1 = 5x 2 => X o = . The presence of a non-zero particular solution, for example, indicates that the vectors a
1 , a
2 , a
3
linearly dependent.
(r A = 2, n= 3). The system is cooperative and uncertain. Its general solution ( x 2 – free variable): x 3 = 13x 2 ; 3x 1 – 2x 2 – 13x 2 = 0 => x 1 = 5x 2 => X o = . The presence of a non-zero particular solution, for example, indicates that the vectors a
1 , a
2 , a
3
linearly dependent.
Example 2.
Find out whether a given system of vectors is linearly dependent or linearly independent:
1. a 1 = { -20, -15, - 4 }, a 2 = { –7, -2, -4 }, a 3 = { 3, –1, –2 }.
Solution. Consider a homogeneous system of equations a 1 x 1 + a 2 x 2 + a 3 x 3 = Θ
or in expanded form (by coordinates)

The system is homogeneous. If it is non-degenerate, then it has a unique solution. In the case of a homogeneous system, there is a zero (trivial) solution. This means that in this case the system of vectors is independent. If the system is degenerate, then it has non-zero solutions and, therefore, it is dependent.
We check the system for degeneracy:
 = –80 – 28 + 180 – 48 + 80 – 210 = – 106 ≠ 0.
= –80 – 28 + 180 – 48 + 80 – 210 = – 106 ≠ 0.
The system is non-degenerate and, thus, the vectors a 1 , a 2 , a 3 linearly independent.
Assignments. Find out whether a given system of vectors is linearly dependent or linearly independent:
1. a 1 = { -4, 2, 8 }, a 2 = { 14, -7, -28 }.
2. a 1 = { 2, -1, 3, 5 }, a 2 = { 6, -3, 3, 15 }.
3. a 1 = { -7, 5, 19 }, a 2 = { -5, 7 , -7 }, a 3 = { -8, 7, 14 }.
4. a 1 = { 1, 2, -2 }, a 2 = { 0, -1, 4 }, a 3 = { 2, -3, 3 }.
5. a 1 = { 1, 8 , -1 }, a 2 = { -2, 3, 3 }, a 3 = { 4, -11, 9 }.
6. a 1 = { 1, 2 , 3 }, a 2 = { 2, -1 , 1 }, a 3 = { 1, 3, 4 }.
7. a 1 = {0, 1, 1 , 0}, a 2 = {1, 1 , 3, 1}, a 3 = {1, 3, 5, 1}, a 4 = {0, 1, 1, -2}.
8. a 1 = {-1, 7, 1 , -2}, a 2 = {2, 3 , 2, 1}, a 3 = {4, 4, 4, -3}, a 4 = {1, 6, -11, 1}.
9. Prove that a system of vectors will be linearly dependent if it contains:
a) two equal vectors;
b) two proportional vectors.
Task 1. Find out whether the system of vectors is linearly independent. The system of vectors will be specified by the matrix of the system, the columns of which consist of the coordinates of the vectors.
 .
.
Solution. Let the linear combination  equal to zero. Having written this equality in coordinates, we obtain the following system of equations:
equal to zero. Having written this equality in coordinates, we obtain the following system of equations:
 .
.
Such a system of equations is called triangular. She has only one solution  . Therefore, the vectors
. Therefore, the vectors  linearly independent.
linearly independent.
Task 2. Find out whether the system of vectors is linearly independent.
 .
.
Solution. Vectors  are linearly independent (see problem 1). Let us prove that the vector is a linear combination of vectors
are linearly independent (see problem 1). Let us prove that the vector is a linear combination of vectors  . Vector expansion coefficients
. Vector expansion coefficients  are determined from the system of equations
are determined from the system of equations
 .
.
This system, like a triangular one, has a unique solution.
Therefore, the system of vectors  linearly dependent.
linearly dependent.
Comment. Matrices of the same type as in Problem 1 are called triangular , and in problem 2 – stepped triangular . The question of the linear dependence of a system of vectors is easily resolved if the matrix composed of the coordinates of these vectors is step triangular. If the matrix does not have a special form, then using elementary string conversions , preserving linear relationships between the columns, it can be reduced to a step-triangular form.
Elementary string conversions matrices (EPS) the following operations on a matrix are called:
1) rearrangement of lines;
2) multiplying a string by a non-zero number;
3) adding another string to a string, multiplied by an arbitrary number.
Task 3. Find the maximum linearly independent subsystem and calculate the rank of the system of vectors
 .
.
Solution. Let us reduce the matrix of the system using EPS to a step-triangular form. To explain the procedure, we denote the line with the number of the matrix to be transformed by the symbol . The column after the arrow indicates the actions on the rows of the matrix being converted that must be performed to obtain the rows of the new matrix.

 .
.
Obviously, the first two columns of the resulting matrix are linearly independent, the third column is their linear combination, and the fourth does not depend on the first two. Vectors  are called basic. They form a maximal linearly independent subsystem of the system , and the rank of the system is three.
are called basic. They form a maximal linearly independent subsystem of the system , and the rank of the system is three.
Basis, coordinates
Task 4. Find the basis and coordinates of the vectors in this basis on the set of geometric vectors whose coordinates satisfy the condition  .
.
Solution. The set is a plane passing through the origin. An arbitrary basis on a plane consists of two non-collinear vectors. The coordinates of the vectors in the selected basis are determined by solving the corresponding system of linear equations.
There is another way to solve this problem, when you can find the basis using the coordinates.
Coordinates  spaces are not coordinates on the plane, since they are related by the relation
spaces are not coordinates on the plane, since they are related by the relation  , that is, they are not independent. The independent variables and (they are called free) uniquely define a vector on the plane and, therefore, they can be chosen as coordinates in . Then the basis
, that is, they are not independent. The independent variables and (they are called free) uniquely define a vector on the plane and, therefore, they can be chosen as coordinates in . Then the basis  consists of vectors lying in and corresponding to sets of free variables
consists of vectors lying in and corresponding to sets of free variables  And
And  , that is .
, that is .
Task 5. Find the basis and coordinates of the vectors in this basis on the set of all vectors in space whose odd coordinates are equal to each other.
Solution. Let us choose, as in the previous problem, coordinates in space.
Because  , then free variables
, then free variables  uniquely determine the vector from and are therefore coordinates. The corresponding basis consists of vectors.
uniquely determine the vector from and are therefore coordinates. The corresponding basis consists of vectors.
Task 6. Find the basis and coordinates of the vectors in this basis on the set of all matrices of the form  , Where
, Where  – arbitrary numbers.
– arbitrary numbers.
Solution. Each matrix from is uniquely representable in the form:
This relation is the expansion of the vector from with respect to the basis  with coordinates
with coordinates  .
.
Task 7. Find the dimension and basis of the linear hull of a system of vectors
 .
.
Solution. Using the EPS, we transform the matrix from the coordinates of the system vectors to a step-triangular form.


 .
.
Columns  the last matrices are linearly independent, and the columns
the last matrices are linearly independent, and the columns  linearly expressed through them. Therefore, the vectors
linearly expressed through them. Therefore, the vectors  form a basis
form a basis  , And
, And  .
.
Comment. Basis in is chosen ambiguously. For example, vectors  also form a basis
also form a basis  .
.
Vectors, their properties and actions with them
Vectors, actions with vectors, linear vector space.
Vectors are an ordered collection of a finite number of real numbers.
Actions: 1.Multiplying a vector by a number: lambda*vector x=(lamda*x 1, lambda*x 2 ... lambda*x n).(3.4, 0, 7)*3=(9, 12,0.21)
2. Addition of vectors (belong to the same vector space) vector x + vector y = (x 1 + y 1, x 2 + y 2, ... x n + y n,)
3. Vector 0=(0,0…0)---n E n – n-dimensional (linear space) vector x + vector 0 = vector x
Theorem. In order for a system of n vectors, an n-dimensional linear space, to be linearly dependent, it is necessary and sufficient that one of the vectors be a linear combination of the others.
Theorem. Any set of n+ 1st vectors of n-dimensional linear space of phenomena. linearly dependent.
Addition of vectors, multiplication of vectors by numbers. Subtraction of vectors.
The sum of two vectors is a vector directed from the beginning of the vector to the end of the vector, provided that the beginning coincides with the end of the vector. If vectors are given by their expansions in basis unit vectors, then when adding vectors, their corresponding coordinates are added.
Let's consider this using the example of a Cartesian coordinate system. Let
Let's show that

From Figure 3 it is clear that ![]()

The sum of any finite number of vectors can be found using the polygon rule (Fig. 4): to construct the sum of a finite number of vectors, it is enough to combine the beginning of each subsequent vector with the end of the previous one and construct a vector connecting the beginning of the first vector with the end of the last.

Properties of the vector addition operation:
In these expressions m, n are numbers.
The difference between vectors is called a vector. The second term is a vector opposite to the vector in direction, but equal to it in length.

Thus, the operation of subtracting vectors is replaced by an addition operation
A vector whose beginning is at the origin and end at point A (x1, y1, z1) is called the radius vector of point A and is denoted simply. Since its coordinates coincide with the coordinates of point A, its expansion in unit vectors has the form

A vector that starts at point A(x1, y1, z1) and ends at point B(x2, y2, z2) can be written as ![]()
where r 2 is the radius vector of point B; r 1 - radius vector of point A.
Therefore, the expansion of the vector in unit vectors has the form
Its length is equal to the distance between points A and B
MULTIPLICATION
So in the case of a plane problem, the product of a vector by a = (ax; ay) by the number b is found by the formula
a b = (ax b; ay b)
Example 1. Find the product of the vector a = (1; 2) by 3.
3 a = (3 1; 3 2) = (3; 6)
So, in the case of a spatial problem, the product of the vector a = (ax; ay; az) by the number b is found by the formula
a b = (ax b; ay b; az b)
Example 1. Find the product of the vector a = (1; 2; -5) by 2.
2 a = (2 1; 2 2; 2 (-5)) = (2; 4; -10)
Dot product of vectors and ![]() where is the angle between the vectors and ; if either, then
where is the angle between the vectors and ; if either, then
From the definition of the scalar product it follows that ![]()
where, for example, is the magnitude of the projection of the vector onto the direction of the vector.
Scalar squared vector:
Properties of the dot product:
![]()
![]()
![]()
![]()
Dot product in coordinates
If ![]()
![]() That
That ![]()
Angle between vectors
Angle between vectors - the angle between the directions of these vectors (smallest angle).
Cross product (Cross product of two vectors.) - this is a pseudovector perpendicular to a plane constructed from two factors, which is the result of the binary operation “vector multiplication” over vectors in three-dimensional Euclidean space. The product is neither commutative nor associative (it is anticommutative) and is different from the dot product of vectors. In many engineering and physics problems, you need to be able to construct a vector perpendicular to two existing ones - the vector product provides this opportunity. The cross product is useful for "measuring" the perpendicularity of vectors - the length of the cross product of two vectors is equal to the product of their lengths if they are perpendicular, and decreases to zero if the vectors are parallel or antiparallel.
The cross product is defined only in three-dimensional and seven-dimensional spaces. The result of a vector product, like a scalar product, depends on the metric of Euclidean space.
Unlike the formula for calculating scalar product vectors from coordinates in a three-dimensional rectangular coordinate system, the formula for the cross product depends on the orientation of the rectangular coordinate system or, in other words, its “chirality”
Collinearity of vectors.
Two non-zero (not equal to 0) vectors are called collinear if they lie on parallel lines or on the same line. An acceptable, but not recommended, synonym is “parallel” vectors. Collinear vectors can be identically directed ("codirectional") or oppositely directed (in the latter case they are sometimes called "anticollinear" or "antiparallel").
Mixed product of vectors( a, b, c)- scalar product of vector a and the vector product of vectors b and c:
(a,b,c)=a ⋅(b ×c)
it is sometimes called the triple dot product of vectors, apparently because the result is a scalar (more precisely, a pseudoscalar).
Geometric meaning: The modulus of the mixed product is numerically equal to the volume of the parallelepiped formed by the vectors (a,b,c) .
Properties
A mixed product is skew-symmetric with respect to all its arguments: i.e. e. rearranging any two factors changes the sign of the product. It follows that the Mixed product in the right Cartesian coordinate system (in an orthonormal basis) is equal to the determinant of a matrix composed of vectors and:
The mixed product in the left Cartesian coordinate system (in an orthonormal basis) is equal to the determinant of the matrix composed of vectors and, taken with a minus sign:
In particular,
If any two vectors are parallel, then with any third vector they form a mixed product equal to zero.
If three vectors are linearly dependent (that is, coplanar, lying in the same plane), then their mixed product is equal to zero.
Geometric meaning - The mixed product is equal in absolute value to the volume of the parallelepiped (see figure) formed by the vectors and; the sign depends on whether this triple of vectors is right-handed or left-handed.
Coplanarity of vectors.
Three vectors (or a larger number) are called coplanar if they, being reduced to a common origin, lie in the same plane
Properties of coplanarity
If at least one of the three vectors is zero, then the three vectors are also considered coplanar.
A triple of vectors containing a pair of collinear vectors is coplanar.
Mixed product of coplanar vectors. This is a criterion for the coplanarity of three vectors.
Coplanar vectors are linearly dependent. This is also a criterion for coplanarity.
In 3-dimensional space, 3 non-coplanar vectors form a basis
Linearly dependent and linearly independent vectors.
Linearly dependent and independent vector systems.Definition. The vector system is called linearly dependent, if there is at least one non-trivial linear combination of these vectors equal to the zero vector. Otherwise, i.e. if only a trivial linear combination of given vectors equals the null vector, the vectors are called linearly independent.
Theorem (linear dependence criterion). In order for a system of vectors in a linear space to be linearly dependent, it is necessary and sufficient that at least one of these vectors is a linear combination of the others.
1) If among the vectors there is at least one zero vector, then the entire system of vectors is linearly dependent.
In fact, if, for example, , then, assuming , we have a nontrivial linear combination .▲
2) If among the vectors some form a linearly dependent system, then the entire system is linearly dependent.
Indeed, let the vectors , , be linearly dependent. This means that there is a non-trivial linear combination equal to the zero vector. But then, assuming ![]() , we also obtain a nontrivial linear combination equal to the zero vector.
, we also obtain a nontrivial linear combination equal to the zero vector.
2. Basis and dimension. Definition. System of linearly independent vectors ![]() vector space is called basis of this space if any vector from can be represented as a linear combination of vectors of this system, i.e. for each vector there are real numbers
vector space is called basis of this space if any vector from can be represented as a linear combination of vectors of this system, i.e. for each vector there are real numbers ![]() such that the equality holds. This equality is called vector decomposition according to the basis, and the numbers
such that the equality holds. This equality is called vector decomposition according to the basis, and the numbers ![]() are called coordinates of the vector relative to the basis(or in the basis) .
are called coordinates of the vector relative to the basis(or in the basis) .
Theorem (on the uniqueness of the expansion with respect to the basis). Every vector in space can be expanded into a basis in the only way, i.e. coordinates of each vector in the basis are determined unambiguously.







