આ પાઠમાં, દરેક વ્યક્તિ “ઇમ્પલ્સ” વિષયનો અભ્યાસ કરી શકશે. ગતિના સંરક્ષણનો કાયદો." પ્રથમ, આપણે વેગના ખ્યાલને વ્યાખ્યાયિત કરીશું. પછી આપણે નિર્ધારિત કરીશું કે વેગના સંરક્ષણનો કાયદો શું છે - મુખ્ય કાયદાઓમાંનો એક, જેનું પાલન રોકેટને ખસેડવા અને ઉડવા માટે જરૂરી છે. ચાલો ધ્યાનમાં લઈએ કે તે બે સંસ્થાઓ માટે કેવી રીતે લખવામાં આવે છે અને રેકોર્ડિંગમાં કયા અક્ષરો અને અભિવ્યક્તિઓનો ઉપયોગ થાય છે. અમે વ્યવહારમાં તેના ઉપયોગની પણ ચર્ચા કરીશું.
વિષય: શરીરની ક્રિયાપ્રતિક્રિયા અને ગતિના નિયમો
પાઠ 24. આવેગ. ગતિના સંરક્ષણનો કાયદો
Eryutkin Evgeniy Sergeevich
પાઠ "વેગ અને "વેગના સંરક્ષણનો કાયદો" વિષયને સમર્પિત છે. ઉપગ્રહો લોન્ચ કરવા માટે, તમારે રોકેટ બનાવવાની જરૂર છે. રોકેટ ખસેડવા અને ઉડવા માટે, આપણે કાયદાનું સખતપણે પાલન કરવું જોઈએ કે જેના દ્વારા આ સંસ્થાઓ ખસેડશે. આ અર્થમાં સૌથી મહત્વપૂર્ણ કાયદો વેગના સંરક્ષણનો કાયદો છે. ગતિના સંરક્ષણના કાયદા પર સીધા જ જવા માટે, ચાલો પહેલા તે શું છે તે વ્યાખ્યાયિત કરીએ નાડી.
શરીરના સમૂહ અને તેની ગતિનું ઉત્પાદન કહેવાય છે: . મોમેન્ટમ એક વેક્ટર જથ્થો છે; તે હંમેશા તે દિશામાં નિર્દેશિત થાય છે જેમાં ગતિ નિર્દેશિત થાય છે. "ઇમ્પલ્સ" શબ્દ પોતે લેટિન છે અને રશિયનમાં "પુશ", "મૂવ" તરીકે અનુવાદિત થાય છે. ઇમ્પલ્સ નાના અક્ષર દ્વારા સૂચવવામાં આવે છે અને આવેગનું એકમ છે.
વેગના ખ્યાલનો ઉપયોગ કરનાર પ્રથમ વ્યક્તિ હતી. તેણે બળને બદલીને જથ્થા તરીકે આવેગનો ઉપયોગ કરવાનો પ્રયાસ કર્યો. આ અભિગમનું કારણ સ્પષ્ટ છે: બળ માપવાનું ખૂબ મુશ્કેલ છે, પરંતુ દળ અને ઝડપ માપવા એકદમ સરળ છે. તેથી જ વારંવાર એવું કહેવામાં આવે છે કે ગતિ એ ચળવળની માત્રા છે. અને કારણ કે આવેગને માપવા એ માપન બળનો વિકલ્પ છે, તેનો અર્થ એ છે કે આ બે જથ્થાઓને જોડવાની જરૂર છે.

ચોખા. 1. રેને ડેસકાર્ટેસ
આ જથ્થાઓ - આવેગ અને બળ - ખ્યાલ દ્વારા એકબીજા સાથે જોડાયેલા છે. બળના આવેગને બળના ઉત્પાદન તરીકે લખવામાં આવે છે અને તે સમય જે દરમિયાન તે બળ લાગુ થાય છે: બળનો આવેગ. બળ આવેગ માટે કોઈ વિશેષ હોદ્દો નથી.
ચાલો વેગ અને બળ આવેગ વચ્ચેનો સંબંધ જોઈએ. ચાલો આવા જથ્થાને શરીરના વેગમાં ફેરફાર તરીકે ધ્યાનમાં લઈએ, ![]() . તે શરીરના વેગમાં ફેરફાર છે જે બળના આવેગ સમાન છે. તેથી આપણે લખી શકીએ:
. તે શરીરના વેગમાં ફેરફાર છે જે બળના આવેગ સમાન છે. તેથી આપણે લખી શકીએ: ![]() .
.
હવે આગળના મહત્વના પ્રશ્ન પર જઈએ - ગતિના સંરક્ષણનો કાયદો. આ કાયદો બંધ અલગ સિસ્ટમ માટે માન્ય છે.
વ્યાખ્યા: એક બંધ અલગ સિસ્ટમ એવી છે જેમાં શરીર માત્ર એકબીજા સાથે ક્રિયાપ્રતિક્રિયા કરે છે અને બાહ્ય સંસ્થાઓ સાથે ક્રિયાપ્રતિક્રિયા કરતા નથી.
બંધ સિસ્ટમ માટે, વેગના સંરક્ષણનો કાયદો માન્ય છે: બંધ સિસ્ટમમાં, તમામ સંસ્થાઓની ગતિ સ્થિર રહે છે.
ચાલો આપણે બે સંસ્થાઓની સિસ્ટમ માટે વેગના સંરક્ષણનો કાયદો કેવી રીતે લખવામાં આવે છે તે તરફ વળીએ: .
અમે નીચે પ્રમાણે સમાન સૂત્ર લખી શકીએ છીએ: ![]() .
.

ચોખા. 2. બે બોલની સિસ્ટમનો કુલ વેગ તેમની અથડામણ પછી સાચવવામાં આવે છે
મહેરબાની કરીને નોંધ કરો: આ કાયદો શરીરની ગતિ અને ગતિની દિશા નક્કી કરવા માટે, દળોની ક્રિયાને ધ્યાનમાં લેવાનું ટાળીને શક્ય બનાવે છે. આ કાયદો જેટ ગતિ જેવી મહત્વપૂર્ણ ઘટના વિશે વાત કરવાનું શક્ય બનાવે છે.
ન્યૂટનના બીજા નિયમની વ્યુત્પત્તિ
વેગના સંરક્ષણના કાયદા અને બળના વેગ અને શરીરના વેગ વચ્ચેના સંબંધનો ઉપયોગ કરીને, ન્યૂટનના બીજા અને ત્રીજા નિયમો મેળવી શકાય છે. બળનો આવેગ શરીરના વેગમાં ફેરફાર સમાન છે: ![]() . પછી આપણે સમૂહને કૌંસમાંથી બહાર કાઢીએ છીએ, છોડીને. ચાલો સમયને સમીકરણની ડાબી બાજુથી જમણી તરફ લઈ જઈએ અને નીચે પ્રમાણે સમીકરણ લખીએ:
. પછી આપણે સમૂહને કૌંસમાંથી બહાર કાઢીએ છીએ, છોડીને. ચાલો સમયને સમીકરણની ડાબી બાજુથી જમણી તરફ લઈ જઈએ અને નીચે પ્રમાણે સમીકરણ લખીએ:
યાદ કરો કે પ્રવેગકને ઝડપમાં ફેરફારના ગુણોત્તર તરીકે વ્યાખ્યાયિત કરવામાં આવે છે જે દરમિયાન ફેરફાર થયો હતો. જો આપણે હવે અભિવ્યક્તિને બદલે પ્રવેગક પ્રતીકને બદલીએ, તો આપણને અભિવ્યક્તિ મળશે: - ન્યૂટનનો બીજો નિયમ.
ન્યૂટનના ત્રીજા કાયદાની વ્યુત્પત્તિ
ચાલો વેગના સંરક્ષણનો નિયમ લખીએ: . ચાલો m 1 સાથે સંકળાયેલ તમામ જથ્થાઓને સમીકરણની ડાબી બાજુએ અને m 2 સાથે - જમણી બાજુએ ખસેડીએ: .
ચાલો સમૂહને કૌંસમાંથી બહાર લઈએ: . શરીરની ક્રિયાપ્રતિક્રિયા તરત જ થતી નથી, પરંતુ ચોક્કસ સમયગાળા દરમિયાન. અને બંધ સિસ્ટમમાં પ્રથમ અને બીજા શરીર માટે સમયનો આ સમયગાળો સમાન મૂલ્ય હતો:  .
.
સમય t દ્વારા જમણી અને ડાબી બાજુઓનું વિભાજન કરીને, અમને ઝડપમાં સમયાંતરે ફેરફારનો ગુણોત્તર મળે છે - આ અનુક્રમે પ્રથમ અને બીજા શરીરનું પ્રવેગક હશે. તેના આધારે, અમે સમીકરણને નીચે પ્રમાણે ફરીથી લખીએ છીએ: ![]() . આ ન્યુટનનો ત્રીજો નિયમ છે, જે આપણને જાણીતો છે: . બે શરીર એકબીજા સાથે તીવ્રતામાં સમાન અને વિરુદ્ધ દિશામાં દળો સાથે ક્રિયાપ્રતિક્રિયા કરે છે.
. આ ન્યુટનનો ત્રીજો નિયમ છે, જે આપણને જાણીતો છે: . બે શરીર એકબીજા સાથે તીવ્રતામાં સમાન અને વિરુદ્ધ દિશામાં દળો સાથે ક્રિયાપ્રતિક્રિયા કરે છે.
વધારાના સાહિત્યની સૂચિ:
શું તમે ગતિના જથ્થાથી પરિચિત છો? // ક્વોન્ટમ. - 1991. - નંબર 6. - પૃષ્ઠ 40-41. કિકોઈન આઈ.કે., કિકોઈન એ.કે. ભૌતિકશાસ્ત્ર: પાઠયપુસ્તક. 9મા ધોરણ માટે. સરેરાશ શાળાઓ - એમ.: એજ્યુકેશન, 1990. - પી. 110-118 કિકોઈન એ.કે. મોમેન્ટમ અને ગતિ ઊર્જા // ક્વોન્ટમ. - 1985. - નંબર 5. - પૃષ્ઠ 28-29. ભૌતિકશાસ્ત્ર: મિકેનિક્સ. 10મા ધોરણ: પાઠ્યપુસ્તક. ભૌતિકશાસ્ત્રના ઊંડા અભ્યાસ માટે / M.M. બાલાશોવ, એ.આઈ. ગોમોનોવા, એ.બી. ડોલિત્સ્કી અને અન્ય; એડ. જી.યા. માયાકીશેવા. - એમ.: બસ્ટાર્ડ, 2002. - પૃષ્ઠ 284-307.
જ્યારે શરીર ક્રિયાપ્રતિક્રિયા કરે છે, ત્યારે એક શરીરનો આવેગ આંશિક રીતે અથવા સંપૂર્ણપણે બીજા શરીરમાં સ્થાનાંતરિત થઈ શકે છે. જો શરીરની સિસ્ટમ અન્ય સંસ્થાઓના બાહ્ય દળો દ્વારા કાર્ય કરવામાં આવતી નથી, તો આવી સિસ્ટમ કહેવામાં આવે છે બંધ.
બંધ સિસ્ટમમાં, સિસ્ટમમાં સમાવિષ્ટ તમામ સંસ્થાઓના આવેગનો વેક્ટર સરવાળો આ સિસ્ટમના શરીરની એકબીજા સાથેની કોઈપણ ક્રિયાપ્રતિક્રિયા માટે સ્થિર રહે છે.
કુદરતનો આ મૂળભૂત નિયમ કહેવાય છે ગતિના સંરક્ષણનો કાયદો . તે ન્યૂટનના બીજા અને ત્રીજા કાયદાનું પરિણામ છે.
ચાલો આપણે કોઈપણ બે ક્રિયાપ્રતિક્રિયા કરતી સંસ્થાઓને ધ્યાનમાં લઈએ જે બંધ સિસ્ટમનો ભાગ છે. અમે ન્યૂટનના ત્રીજા કાયદા દ્વારા અને તેના અનુસાર આ સંસ્થાઓ વચ્ચેની ક્રિયાપ્રતિક્રિયા દળોને સૂચિત કરીએ છીએ
જો આ સંસ્થાઓ સમય સાથે ક્રિયાપ્રતિક્રિયા કરે છે t, પછી ક્રિયાપ્રતિક્રિયા દળોના આવેગ તીવ્રતામાં સમાન હોય છે અને વિરુદ્ધ દિશામાં નિર્દેશિત થાય છે:
![]()
ચાલો ન્યુટનનો બીજો નિયમ આ સંસ્થાઓ પર લાગુ કરીએ:
સમયની પ્રારંભિક ક્ષણે શરીરના આવેગ ક્યાં અને છે, અને ક્રિયાપ્રતિક્રિયાના અંતે શરીરના આવેગ છે. આ સંબંધોમાંથી તે અનુસરે છે કે બે સંસ્થાઓની ક્રિયાપ્રતિક્રિયાના પરિણામે, તેમની કુલ ગતિ બદલાઈ નથી:
ગતિના સંરક્ષણનો કાયદો:
હવે બંધ સિસ્ટમમાં સમાવિષ્ટ શરીરની તમામ સંભવિત જોડી ક્રિયાપ્રતિક્રિયાઓને ધ્યાનમાં લેતા, અમે નિષ્કર્ષ પર આવી શકીએ છીએ કે બંધ સિસ્ટમના આંતરિક દળો તેના કુલ વેગને બદલી શકતા નથી, એટલે કે, આ સિસ્ટમમાં સમાવિષ્ટ તમામ સંસ્થાઓના વેક્ટરનો સરવાળો.
ચોખા. 1.17.1 ઉદાહરણનો ઉપયોગ કરીને ગતિના સંરક્ષણના કાયદાને સમજાવે છે કેન્દ્રની બહારની અસરજુદા જુદા સમૂહના બે બોલ, જેમાંથી એક અથડામણ પહેલા આરામમાં હતો.
ફિગમાં બતાવેલ છે. 1.17.1 અથડામણ પહેલા અને પછીના દડાના વેક્ટર વેક્ટર સંકલન અક્ષો પર પ્રક્ષેપિત કરી શકાય છે ઓક્સઅને ઓ.વાય. ગતિના સંરક્ષણનો નિયમ દરેક ધરી પરના વેક્ટરના અંદાજો માટે પણ સાચો છે. ખાસ કરીને, મોમેન્ટમ ડાયાગ્રામ (ફિગ. 1.17.1) પરથી તે અનુસરે છે કે ધરી પર અથડાયા પછી બંને દડાના વેક્ટર અને વેગના અંદાજો ઓ.વાયતીવ્રતામાં સમાન હોવા જોઈએ અને અલગ અલગ ચિહ્નો હોવા જોઈએ જેથી તેમનો સરવાળો શૂન્ય થાય.
ગતિના સંરક્ષણનો કાયદોઘણા કિસ્સાઓમાં તે અભિનય દળોના મૂલ્યો અજાણ્યા હોવા છતાં પણ ક્રિયાપ્રતિક્રિયા કરતી સંસ્થાઓના વેગને શોધવાની મંજૂરી આપે છે. એક ઉદાહરણ હશે જેટ પ્રોપલ્શન .
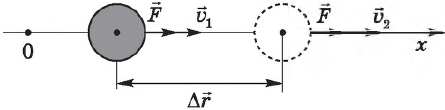
બંદૂકથી ફાયરિંગ કરતી વખતે, એ પાછળ પડવું- અસ્ત્ર આગળ વધે છે, અને બંદૂક પાછળ ફરે છે. અસ્ત્ર અને બંદૂક બે ક્રિયાપ્રતિક્રિયા કરતી સંસ્થાઓ છે. રિકોઇલ દરમિયાન બંદૂક જે ઝડપ મેળવે છે તે માત્ર અસ્ત્રની ઝડપ અને સમૂહ ગુણોત્તર (ફિગ. 1.17.2) પર આધારિત છે. જો બંદૂક અને અસ્ત્રના વેગને અને અને તેમના સમૂહ દ્વારા સૂચવવામાં આવે છે એમઅને m, તો પછી, વેગના સંરક્ષણના કાયદાના આધારે, આપણે ધરી પર અંદાજોમાં લખી શકીએ છીએ ઓક્સ
આપવાના સિદ્ધાંત પર આધારિત છે જેટ પ્રોપલ્શન. IN રોકેટજ્યારે બળતણ બળે છે, ત્યારે ઊંચા તાપમાને ગરમ થયેલા વાયુઓ નોઝલમાંથી રોકેટની તુલનામાં વધુ ઝડપે બહાર કાઢવામાં આવે છે. ચાલો ઉત્સર્જિત વાયુઓના સમૂહને વડે દર્શાવીએ m, અને વાયુઓના એક્ઝોસ્ટ પછી રોકેટનો સમૂહ એમ. પછી બંધ સિસ્ટમ "રોકેટ + વાયુઓ" માટે, વેગના સંરક્ષણના કાયદાના આધારે (બંદૂક ચલાવવાની સમસ્યા સાથે સામ્યતા દ્વારા), અમે લખી શકીએ છીએ:
જ્યાં વી- વાયુઓના એક્ઝોસ્ટ પછી રોકેટની ગતિ. આ કિસ્સામાં, એવું માનવામાં આવે છે કે રોકેટની પ્રારંભિક ગતિ શૂન્ય હતી.
રોકેટની ઝડપ માટે પરિણામી સૂત્ર ફક્ત તે જ શરત હેઠળ માન્ય છે કે બળેલા બળતણનો સંપૂર્ણ સમૂહ રોકેટમાંથી બહાર કાઢવામાં આવે છે. સાથે સાથે. હકીકતમાં, રોકેટની પ્રવેગિત ગતિના સમગ્ર સમયગાળા દરમિયાન આઉટફ્લો ધીમે ધીમે થાય છે. ગેસના દરેક અનુગામી ભાગને રોકેટમાંથી બહાર કાઢવામાં આવે છે, જેણે પહેલેથી જ ચોક્કસ ઝડપ મેળવી લીધી છે.
સચોટ સૂત્ર મેળવવા માટે, રોકેટ નોઝલમાંથી ગેસના પ્રવાહની પ્રક્રિયાને વધુ વિગતવાર ધ્યાનમાં લેવાની જરૂર છે. સમય એક ક્ષણે રોકેટ દો tસમૂહ ધરાવે છે એમઅને ઝડપે આગળ વધે છે (ફિગ. 1.17.3 (1)). ટૂંકા ગાળામાં Δ tઆ ક્ષણે રોકેટની સંબંધિત ગતિ સાથે ગેસનો ચોક્કસ ભાગ રોકેટમાંથી બહાર કાઢવામાં આવશે t + Δ tઝડપ હશે અને તેનું દળ સમાન હશે એમ + Δ એમ, જ્યાં Δ એમ < 0 (рис. 1.17.3 (2)). Масса выброшенных газов будет, очевидно, равна -Δએમ> 0. ઇનર્શિયલ ફ્રેમમાં વાયુઓનો વેગ ઓક્સગતિના સંરક્ષણના કાયદાને લાગુ કરવા સમાન હશે. સમયની એક ક્ષણે t + Δ tરોકેટનો વેગ બરાબર છે, અને ઉત્સર્જિત વાયુઓનો વેગ બરાબર છે ![]() . સમયની એક ક્ષણે tસમગ્ર સિસ્ટમનો વેગ "રોકેટ + વાયુઓ" સિસ્ટમ બંધ છે એમ ધારીને સમાન હતું, આપણે લખી શકીએ:
. સમયની એક ક્ષણે tસમગ્ર સિસ્ટમનો વેગ "રોકેટ + વાયુઓ" સિસ્ટમ બંધ છે એમ ધારીને સમાન હતું, આપણે લખી શકીએ:
મૂલ્યની અવગણના કરી શકાય છે, કારણ કે |Δ એમ| << એમ. છેલ્લા સંબંધની બંને બાજુઓને Δ વડે વિભાજીત કરવી tઅને Δ પરની મર્યાદામાં પસાર થાય છે t→0, અમને મળે છે:
|
|
|
આકૃતિ 1.17.3. મુક્ત અવકાશમાં ફરતું રોકેટ (ગુરુત્વાકર્ષણ વિના). 1 - સમયની ક્ષણે t. રોકેટ માસ M, તેની ઝડપ 2 - સમયની એક ક્ષણે રોકેટ t + Δ t. રોકેટ માસ એમ + Δ એમ, જ્યાં Δ એમ < 0, ее скорость масса выброшенных газов -Δએમ> 0, સાપેક્ષ ગેસ વેગ, ઇનર્શિયલ ફ્રેમમાં ગેસ વેગ |

તીવ્રતા ![]() એકમ સમય દીઠ બળતણ વપરાશ છે. જથ્થો કહેવાય છે દબાણ બળરિએક્ટિવ થ્રસ્ટ ફોર્સ એસ્કેપિંગ વાયુઓની બાજુથી રોકેટ પર કાર્ય કરે છે તે સંબંધિત ગતિની વિરુદ્ધ દિશામાં નિર્દેશિત થાય છે. ગુણોત્તર
એકમ સમય દીઠ બળતણ વપરાશ છે. જથ્થો કહેવાય છે દબાણ બળરિએક્ટિવ થ્રસ્ટ ફોર્સ એસ્કેપિંગ વાયુઓની બાજુથી રોકેટ પર કાર્ય કરે છે તે સંબંધિત ગતિની વિરુદ્ધ દિશામાં નિર્દેશિત થાય છે. ગુણોત્તર ![]() ચલ દળના શરીર માટે ન્યુટનનો બીજો નિયમ વ્યક્ત કરે છે. જો રોકેટ નોઝલમાંથી વાયુઓ સખત રીતે પાછળની તરફ બહાર કાઢવામાં આવે છે (ફિગ. 1.17.3), તો સ્કેલર સ્વરૂપમાં આ સંબંધ આ સ્વરૂપ લે છે:
ચલ દળના શરીર માટે ન્યુટનનો બીજો નિયમ વ્યક્ત કરે છે. જો રોકેટ નોઝલમાંથી વાયુઓ સખત રીતે પાછળની તરફ બહાર કાઢવામાં આવે છે (ફિગ. 1.17.3), તો સ્કેલર સ્વરૂપમાં આ સંબંધ આ સ્વરૂપ લે છે:
જ્યાં u- સંબંધિત વેગ મોડ્યુલ. એકીકરણની ગાણિતિક ક્રિયાનો ઉપયોગ કરીને, આ સંબંધમાંથી આપણે મેળવી શકીએ છીએ સૂત્રત્સિઓલકોવ્સ્કીરોકેટની અંતિમ ગતિ માટે:
![]()
રોકેટના પ્રારંભિક અને અંતિમ માસનો ગુણોત્તર ક્યાં છે.
તે તેના પરથી અનુસરે છે કે રોકેટની અંતિમ ગતિ વાયુઓના પ્રવાહની સંબંધિત ગતિ કરતાં વધી શકે છે. પરિણામે, રોકેટને અવકાશ ઉડાન માટે જરૂરી ઊંચી ઝડપે ઝડપી શકાય છે. પરંતુ આ રોકેટના પ્રારંભિક દળના મોટા પ્રમાણમાં, નોંધપાત્ર પ્રમાણમાં બળતણનો ઉપયોગ કરીને જ પ્રાપ્ત કરી શકાય છે. ઉદાહરણ તરીકે, પ્રથમ એસ્કેપ વેગ હાંસલ કરવા માટે υ = υ 1 = 7.9·10 3 m/s u= 3·10 3 m/s (ઇંધણના દહન દરમિયાન ગેસનો પ્રવાહ વેગ 2-4 km/s ના ક્રમમાં હોય છે) પ્રારંભિક માસ સિંગલ સ્ટેજ રોકેટઅંતિમ માસના આશરે 14 ગણું હોવું જોઈએ. અંતિમ ઝડપ હાંસલ કરવા માટે υ = 4 uગુણોત્તર 50 હોવો જોઈએ.
જેટ ગતિ ગતિના સંરક્ષણના નિયમ પર આધારિત છે અને આ નિર્વિવાદ છે. માત્ર ઘણી સમસ્યાઓ અલગ અલગ રીતે ઉકેલાય છે. હું નીચેના સૂચવે છે. સૌથી સરળ જેટ એન્જિન: એક ચેમ્બર જેમાં બળતણ બાળીને સતત દબાણ જાળવવામાં આવે છે, ચેમ્બરના નીચેના ભાગમાં એક છિદ્ર છે જેના દ્વારા ચોક્કસ ઝડપે ગેસ વહે છે. વેગના સંરક્ષણના નિયમ મુજબ, કેમેરા (સત્ય) ખસેડવાનું શરૂ કરે છે. બીજી રીત. ચેમ્બરના તળિયે એક છિદ્ર છે, એટલે કે. નીચલા તળિયાનો વિસ્તાર છિદ્રના ક્ષેત્ર દ્વારા ઉપરના તળિયાના વિસ્તાર કરતા ઓછો છે. દબાણ અને વિસ્તારનું ઉત્પાદન બળ આપે છે. ઉપલા તળિયે કાર્ય કરતું બળ નીચલા ભાગ કરતા વધારે છે (વિસ્તારોમાં તફાવતને કારણે), અમને અસંતુલિત બળ મળે છે જે ચેમ્બરને ગતિમાં સેટ કરે છે. F = p (S1-S2) = pSholes, જ્યાં S1 એ ઉપરના તળિયાનો વિસ્તાર છે, S2 એ નીચેના તળિયાનો વિસ્તાર છે, Sholes એ છિદ્રનો વિસ્તાર છે. જો તમે પરંપરાગત પદ્ધતિ અને મેં પ્રસ્તાવિત પદ્ધતિનો ઉપયોગ કરીને સમસ્યાઓ હલ કરો છો, તો પરિણામ સમાન હશે. મેં પ્રસ્તાવિત કરેલી પદ્ધતિ વધુ જટિલ છે, પરંતુ તે જેટ પ્રોપલ્શનની ગતિશીલતા સમજાવે છે. ગતિના સંરક્ષણના કાયદાનો ઉપયોગ કરીને સમસ્યાઓનું નિરાકરણ સરળ છે, પરંતુ તે સ્પષ્ટ કરતું નથી કે કેમેરાને ગતિમાં મૂકે છે તે બળ ક્યાંથી આવે છે.
પાઠ હેતુઓ:
- શૈક્ષણિક: "બોડી ઇમ્પલ્સ", "ફોર્સ ઇમ્પલ્સ" વિભાવનાઓની રચના; સરળ કેસોમાં શરીરની ક્રિયાપ્રતિક્રિયાની ઘટનાના વિશ્લેષણમાં તેમને લાગુ કરવાની ક્ષમતા; વિદ્યાર્થીઓ વેગના સંરક્ષણના કાયદાની રચના અને વ્યુત્પત્તિને સમજે છે તેની ખાતરી કરવા માટે;
- વિકાસશીલ: પૃથ્થકરણ કરવાની ક્ષમતા વિકસાવવા, મિકેનિક્સની મૂળભૂત બાબતો, શોધ જ્ઞાનાત્મક પ્રવૃત્તિની કુશળતા અને સ્વ-વિશ્લેષણની ક્ષમતા પર અગાઉ અભ્યાસ કરેલ સામગ્રીના ઘટકો વચ્ચે જોડાણો સ્થાપિત કરવા;
- શૈક્ષણિક: વિદ્યાર્થીઓના સૌંદર્યલક્ષી સ્વાદનો વિકાસ, તેમના જ્ઞાનને સતત વિસ્તૃત કરવાની ઇચ્છાને ઉત્તેજીત કરવી; વિષયમાં રસ જાળવી રાખો.
સાધનસામગ્રી: તાર પર ધાતુના દડા, પ્રદર્શન ગાડીઓ, વજન.
શીખવાના સાધનો: ટેસ્ટ કાર્ડ.
પાઠ પ્રગતિ
1. સંસ્થાકીય તબક્કો (1 મિનિટ)
2. અભ્યાસ કરેલ સામગ્રીનું પુનરાવર્તન. (10 મિનિટ)
શિક્ષક:તમે એક નાની ક્રોસવર્ડ પઝલ હલ કરીને પાઠનો વિષય શીખી શકશો, જેનો મુખ્ય શબ્દ અમારા પાઠનો વિષય હશે. (અમે ડાબેથી જમણે હલ કરીએ છીએ, અમે વર્ટિકલી એક પછી એક શબ્દો લખીએ છીએ).
- બાહ્ય પ્રભાવોની ગેરહાજરીમાં અથવા જ્યારે તેઓને વળતર આપવામાં આવે ત્યારે સતત ગતિ જાળવવાની ઘટના.
- શરીરની માત્રા અથવા આકાર બદલવાની ઘટના.
- વિરૂપતા દરમિયાન ઉત્પન્ન થયેલ બળ શરીરને તેની મૂળ સ્થિતિ પર પાછા ફરે છે.
- ન્યુટનના સમકાલીન એક અંગ્રેજી વૈજ્ઞાનિકે વિરૂપતા પર સ્થિતિસ્થાપક બળની અવલંબન સ્થાપિત કરી.
- સમૂહનો એકમ.
- અંગ્રેજી વૈજ્ઞાનિક જેમણે મિકેનિક્સના મૂળભૂત નિયમોની શોધ કરી.
- વેક્ટર ભૌતિક જથ્થા, સંખ્યાત્મક રીતે એકમ સમય દીઠ ઝડપમાં ફેરફારની સમાન.
- જે બળથી પૃથ્વી તમામ શરીરોને પોતાની તરફ આકર્ષે છે.
- એક બળ કે જે પરમાણુઓ અને સંપર્ક કરતી સંસ્થાઓના અણુઓ વચ્ચે ક્રિયાપ્રતિક્રિયા દળોના અસ્તિત્વને કારણે ઉદ્ભવે છે.
- શરીર વચ્ચેની ક્રિયાપ્રતિક્રિયાનું માપ.
- મિકેનિક્સની એક શાખા જે તેમના પર લાગુ પડતા દળોના પ્રભાવ હેઠળ ભૌતિક સંસ્થાઓની યાંત્રિક ગતિના નિયમોનો અભ્યાસ કરે છે.
3. નવી સામગ્રીનો અભ્યાસ. (18 મિનિટ)
મિત્રો, અમારા પાઠનો વિષય "શારીરિક આવેગ. ગતિના સંરક્ષણનો કાયદો"
પાઠ હેતુઓ: શરીરના વેગની વિભાવના, બંધ સિસ્ટમની વિભાવના શીખો, વેગના સંરક્ષણના કાયદાનો અભ્યાસ કરો, સંરક્ષણના કાયદા પર સમસ્યાઓ હલ કરવાનું શીખો.
આજે પાઠમાં આપણે માત્ર પ્રયોગો જ નહીં, પણ તેને ગાણિતિક રીતે સાબિત પણ કરીશું.
મિકેનિક્સના મૂળભૂત નિયમો, મુખ્યત્વે ન્યૂટનના ત્રણ નિયમોને જાણીને, એવું લાગે છે કે કોઈ વ્યક્તિ શરીરની ગતિ વિશેની કોઈપણ સમસ્યાને હલ કરી શકે છે. મિત્રો, હું તમને કેટલાક પ્રયોગો બતાવીશ, અને તમને લાગે છે કે, શું આ કિસ્સાઓમાં ફક્ત ન્યુટનના નિયમોનો ઉપયોગ કરીને સમસ્યાઓ હલ કરવી શક્ય છે?
સમસ્યા પ્રયોગ.
પ્રયોગ નંબર 1. હલકી ગતિએ ચાલતી કાર્ટને ઝુકાવેલું પ્લેન નીચે ફેરવવું. તેણી એક શરીરને ખસેડે છે જે તેના પાથમાં છે.
શું કાર્ટ અને શરીર વચ્ચેનું બળ શોધવાનું શક્ય છે? (ના, કારણ કે કાર્ટ અને શરીર વચ્ચેની અથડામણ અલ્પજીવી છે અને તેમની ક્રિયાપ્રતિક્રિયાનું બળ નક્કી કરવું મુશ્કેલ છે).
અનુભવ નંબર 2. લોડેડ કાર્ટ રોલિંગ. શરીરને વધુ ખસેડે છે.
શું આ કિસ્સામાં કાર્ટ અને શરીર વચ્ચેની ક્રિયાપ્રતિક્રિયાનું બળ શોધવાનું શક્ય છે?
નિષ્કર્ષ દોરો: શરીરની હિલચાલને દર્શાવવા માટે કયા ભૌતિક જથ્થાનો ઉપયોગ કરી શકાય છે?
નિષ્કર્ષ: ન્યુટનના કાયદાઓ જો શરીર પર કાર્ય કરતી તમામ શક્તિઓ જાણીતી હોય તો ગતિશીલ શરીરના પ્રવેગને શોધવા સંબંધિત સમસ્યાઓનું નિરાકરણ શક્ય બનાવે છે, એટલે કે. તમામ દળોના પરિણામે. પરંતુ પરિણામી બળ નક્કી કરવું ઘણીવાર ખૂબ જ મુશ્કેલ હોય છે, જેમ કે આપણા કેસોમાં હતો.
જો રમકડાની ગાડી તમારી તરફ આવી રહી હોય, તો તમે તેને તમારા અંગૂઠાથી રોકી શકો છો, પરંતુ જો કોઈ ટ્રક તમારી તરફ આવી રહી હોય તો શું?
નિષ્કર્ષ: ચળવળને દર્શાવવા માટે, તમારે શરીરના સમૂહ અને તેની ગતિ જાણવાની જરૂર છે.
તેથી, સમસ્યાઓ હલ કરવા માટે, તેઓ અન્ય મહત્વપૂર્ણ ભૌતિક જથ્થાનો ઉપયોગ કરે છે - શરીર આવેગ.
વેગનો ખ્યાલ ફ્રેન્ચ વૈજ્ઞાનિક રેને ડેસકાર્ટેસ (1596-1650) દ્વારા ભૌતિકશાસ્ત્રમાં દાખલ કરવામાં આવ્યો હતો, જેમણે આ જથ્થાને "ગતિનો જથ્થો" તરીકે ઓળખાવ્યો હતો: "હું સ્વીકારું છું કે બ્રહ્માંડમાં ... ગતિનો ચોક્કસ જથ્થો છે, જે ક્યારેય નહીં. વધે છે, ઘટતું નથી, અને આમ, જો એક શરીર બીજાને ગતિમાં મૂકે છે, તો તે તેની જેટલી ગતિ આપે છે તેટલું ગુમાવે છે."
ચાલો શરીર પર કાર્ય કરતા બળ, તેની ક્રિયાનો સમય અને શરીરની ગતિમાં થતા ફેરફાર વચ્ચેનો સંબંધ શોધીએ.
બોડી માસ થવા દો mબળ કાર્ય કરવાનું શરૂ કરે છે એફ.પછી, ન્યુટનના બીજા નિયમથી, આ શરીરનું પ્રવેગ થશે એ.
યાદ રાખો કે ન્યુટનનો બીજો નિયમ કેવી રીતે વાંચવામાં આવે છે?
ચાલો ફોર્મમાં કાયદો લખીએ
બીજી બાજુ:
અથવા ![]() અમે આવેગ સ્વરૂપમાં ન્યુટનના બીજા નિયમનું સૂત્ર મેળવ્યું.
અમે આવેગ સ્વરૂપમાં ન્યુટનના બીજા નિયમનું સૂત્ર મેળવ્યું.
ચાલો ઉત્પાદન સૂચવીએ દ્વારા આર:
શરીરના સમૂહ અને તેની ગતિના ઉત્પાદનને શરીરની ગતિ કહેવામાં આવે છે.
પલ્સ આર- વેક્ટર જથ્થો. તે હંમેશા શરીરના વેગ વેક્ટર સાથે દિશામાં એકરુપ થાય છે. કોઈપણ શરીર જે ખસે છે તેની ગતિ હોય છે.
વ્યાખ્યા: શરીરનો વેગ એ શરીરના સમૂહ અને તેની ગતિ અને ગતિની દિશા ધરાવતી વેક્ટર ભૌતિક જથ્થો છે.
કોઈપણ ભૌતિક જથ્થાની જેમ, વેગ ચોક્કસ એકમોમાં માપવામાં આવે છે.
આવેગ માટે માપનનું એકમ કોણ મેળવવા માંગે છે? (વિદ્યાર્થી બ્લેકબોર્ડ પર નોંધ લે છે.)
(p) = (kg m/s)
ચાલો આપણી સમાનતા પર પાછા ફરીએ . ભૌતિકશાસ્ત્રમાં, બળ અને ક્રિયાના સમયનું ઉત્પાદન કહેવામાં આવે છે શક્તિનો આવેગ.
આવેગ બળ દર્શાવે છે કે આપેલ સમય દરમિયાન શરીરની ગતિ કેવી રીતે બદલાય છે.
ડેસકાર્ટેસે વેગના સંરક્ષણનો કાયદો સ્થાપિત કર્યો હતો, પરંતુ તે સ્પષ્ટપણે સમજી શક્યો ન હતો કે વેગ એ વેક્ટર જથ્થો છે. વેગની વિભાવનાને ડચ ભૌતિકશાસ્ત્રી અને ગણિતશાસ્ત્રી હ્યુજેન્સ દ્વારા સ્પષ્ટ કરવામાં આવી હતી, જેમણે, દડાની અસરનો અભ્યાસ કરીને સાબિત કર્યું હતું કે જ્યારે તેઓ અથડાય છે, ત્યારે તે અંકગણિતનો સરવાળો નથી જે સાચવવામાં આવે છે, પરંતુ વેક્ટરનો વેક્ટર સરવાળો છે.
પ્રયોગ (બે બોલ થ્રેડો પર સસ્પેન્ડેડ છે)
યોગ્ય નકારવામાં આવે છે અને છોડવામાં આવે છે. તેની પાછલી સ્થિતિ પર પાછા ફરો અને સ્થિર બોલને ફટકારતા, તે અટકી જાય છે. આ કિસ્સામાં, ડાબો બોલ ખસવાનું શરૂ કરે છે અને જમણા બોલને જે રીતે ડિફ્લેક્ટ કરવામાં આવ્યો હતો તે જ ખૂણેથી વિચલિત થાય છે.
મોમેન્ટમમાં એક રસપ્રદ ગુણધર્મ છે જે માત્ર થોડા ભૌતિક જથ્થામાં છે. આ એક સંરક્ષણ મિલકત છે. પરંતુ વેગના સંરક્ષણનો કાયદો ફક્ત બંધ સિસ્ટમમાં જ સંતોષાય છે.
જો એકબીજા સાથે ક્રિયાપ્રતિક્રિયા કરતી સંસ્થાઓ અન્ય સંસ્થાઓ સાથે ક્રિયાપ્રતિક્રિયા ન કરતી હોય તો શરીરની સિસ્ટમને બંધ કહેવામાં આવે છે.
એકબીજા સાથેની ક્રિયાપ્રતિક્રિયાના પરિણામે બંધ સિસ્ટમ બનાવે છે તે દરેક શરીરની ગતિ બદલાઈ શકે છે.
બંધ પ્રણાલી બનાવે છે તે સંસ્થાઓના આવેગનો વેક્ટર સરવાળો સમય જતાં આ સંસ્થાઓની કોઈપણ હિલચાલ અને ક્રિયાપ્રતિક્રિયાઓ માટે બદલાતો નથી.
આ વેગના સંરક્ષણનો નિયમ છે.
ઉદાહરણો: એક બંદૂક અને તેના બેરલમાં એક બુલેટ, તોપ અને શેલ, રોકેટ શેલ અને તેમાં રહેલું બળતણ.
ગતિના સંરક્ષણનો કાયદો.
વેગના સંરક્ષણનો નિયમ ન્યૂટનના બીજા અને ત્રીજા કાયદામાંથી લેવામાં આવ્યો છે.
ચાલો એક બંધ સિસ્ટમને ધ્યાનમાં લઈએ જેમાં બે શરીર હોય છે - દડા m 1 અને m 2, જે એક સીધી રેખા સાથે ગતિ સાથે સમાન દિશામાં આગળ વધે છે? 1 અને? 2. સહેજ અંદાજ સાથે, અમે ધારી શકીએ છીએ કે દડા બંધ સિસ્ટમનું પ્રતિનિધિત્વ કરે છે.
અનુભવ પરથી તે સ્પષ્ટ છે કે બીજો બોલ વધુ ઝડપે આગળ વધે છે (વેક્ટરને લાંબા તીર દ્વારા દર્શાવવામાં આવ્યું છે). તેથી, તે પ્રથમ બોલ સાથે પકડી લેશે અને તેઓ ટકરાશે. ( શિક્ષકની ટિપ્પણીઓ સાથે પ્રયોગ જુઓ).
સંરક્ષણ કાયદાની ગાણિતિક વ્યુત્પત્તિ
અને હવે અમે ગણિત અને ભૌતિકશાસ્ત્રના નિયમોનો ઉપયોગ કરીને, વેગના સંરક્ષણના કાયદાનું ગાણિતિક વ્યુત્પત્તિ બનાવવા માટે "કમાન્ડરો" ને પ્રોત્સાહિત કરીશું.
5) આ કાયદો કઈ શરતો હેઠળ લાગુ કરવામાં આવે છે?
6) કઈ સિસ્ટમને બંધ કહેવામાં આવે છે?
7) બંદૂક ચલાવતી વખતે પાછળ શા માટે આવે છે?
5. સમસ્યાનું નિરાકરણ (10 મિનિટ)
નંબર 323 (રીમકેવિચ).
બે સ્થિતિસ્થાપક પદાર્થો, જેનું વજન 2 અને 6 કિલો છે, દરેક 2 m/s ની ઝડપે એકબીજા તરફ આગળ વધે છે. અસર પછી આ શરીરો કઈ ઝડપે અને કઈ દિશામાં આગળ વધશે?
શિક્ષક સમસ્યા માટે ચિત્ર પર ટિપ્પણી કરે છે.

7. પાઠનો સારાંશ; હોમવર્ક (2 મિનિટ)
હોમવર્ક: § 41, 42 ભૂતપૂર્વ. 8 (1, 2).
સાહિત્ય:
- વી. યા. ભૌતિકશાસ્ત્રના શિક્ષણમાં સૌંદર્યલક્ષી શિક્ષણ. શિક્ષકો માટે પુસ્તક. -મોસ્કો "બોધ" 1986.
- વી. એ. વોલ્કોવ. ભૌતિકશાસ્ત્રમાં પાઠ વિકાસ, ગ્રેડ 10. - મોસ્કો "વાકો" 2006.
- પ્રોફેસર B.I Spassky દ્વારા સંપાદિત.
- ભૌતિકશાસ્ત્ર પર વાચક. -મોસ્કો "બોધ" 1987.
આઇ. આઇ. મોક્રોવા. એ.વી. પેરીશ્કિન દ્વારા પાઠ્યપુસ્તક પર આધારિત પાઠ યોજનાઓ. 9મો ધોરણ.” - વોલ્ગોગ્રાડ 2003.
શારીરિક આવેગ
શરીરનો વેગ એ શરીરના સમૂહ અને તેની ગતિના ઉત્પાદન સમાન જથ્થો છે.
તે યાદ રાખવું જોઈએ કે આપણે એવા શરીર વિશે વાત કરી રહ્યા છીએ જેને ભૌતિક બિંદુ તરીકે રજૂ કરી શકાય છે. શરીરના વેગ ($p$) ને મોમેન્ટમ પણ કહેવાય છે. વેગનો ખ્યાલ રેને ડેસકાર્ટેસ (1596-1650) દ્વારા ભૌતિકશાસ્ત્રમાં રજૂ કરવામાં આવ્યો હતો. "ઇમ્પલ્સ" શબ્દ પાછળથી દેખાયો (લેટિનમાં ઇમ્પલ્સસનો અર્થ "પુશ" થાય છે). મોમેન્ટમ એ વેક્ટર જથ્થો છે (જેમ કે ઝડપ) અને સૂત્ર દ્વારા વ્યક્ત થાય છે:
$p↖(→)=mυ↖(→)$
વેગ વેક્ટરની દિશા હંમેશા વેગની દિશા સાથે એકરુપ હોય છે.
આવેગનો SI એકમ એ શરીરનો આવેગ છે જેનું વજન $1$ m/s ની ઝડપે ફરે છે તેથી, આવેગનું એકમ $1$ kg $·$ m/s છે;
જો $∆t$ ના સમયગાળા દરમિયાન શરીર (ભૌતિક બિંદુ) પર સ્થિર બળ કાર્ય કરે છે, તો પ્રવેગક પણ સ્થિર રહેશે:
$a↖(→)=(υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
જ્યાં $(υ_1)↖(→)$ અને $(υ_2)↖(→)$ એ શરીરના પ્રારંભિક અને અંતિમ વેગ છે. આ મૂલ્યને ન્યૂટનના બીજા નિયમની અભિવ્યક્તિમાં બદલીને, આપણને મળે છે:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
કૌંસ ખોલીને અને શરીરના વેગ માટે અભિવ્યક્તિનો ઉપયોગ કરીને, અમારી પાસે છે:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
અહીં $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ એ $∆t$ સમય સાથે વેગમાં ફેરફાર છે. પછી પાછલું સમીકરણ ફોર્મ લેશે:
$∆p↖(→)=F↖(→)∆t$
$∆p↖(→)=F↖(→)∆t$ એ ન્યૂટનના બીજા નિયમનું ગાણિતિક પ્રતિનિધિત્વ છે. બળનું ઉત્પાદન અને તેની ક્રિયાની અવધિ કહેવામાં આવે છેબળનો આવેગ . તેથી જ
બિંદુના વેગમાં ફેરફાર તેના પર કામ કરતા બળના વેગમાં ફેરફાર સમાન છે. સમીકરણ $∆p↖(→)=F↖(→)∆t$ કહેવાય છેશરીરની ગતિનું સમીકરણ
. એ નોંધવું જોઈએ કે સમાન ક્રિયા - બિંદુના વેગમાં ફેરફાર - લાંબા સમયગાળામાં નાના બળ દ્વારા અને ટૂંકા ગાળામાં મોટા બળ દ્વારા પ્રાપ્ત કરી શકાય છે.
સિસ્ટમ ટેલનો આવેગ. મોમેન્ટમ ચેન્જનો કાયદો
યાંત્રિક પ્રણાલીનો આવેગ (ગતિની માત્રા) એ આ સિસ્ટમના તમામ ભૌતિક બિંદુઓના આવેગના સરવાળા સમાન વેક્ટર છે:
પરિવર્તનના નિયમો અને ગતિના સંરક્ષણ એ ન્યૂટનના બીજા અને ત્રીજા નિયમોનું પરિણામ છે.
ચાલો બે સંસ્થાઓની બનેલી સિસ્ટમનો વિચાર કરીએ. આકૃતિમાં દળો ($F_(12)$ અને $F_(21)$ કે જેની સાથે સિસ્ટમના શરીર એકબીજા સાથે ક્રિયાપ્રતિક્રિયા કરે છે તેને આંતરિક કહેવામાં આવે છે.
ચાલો, આંતરિક દળો ઉપરાંત, બાહ્ય દળો $(F_1)↖(→)$ અને $(F_2)↖(→)$ સિસ્ટમ પર કાર્ય કરે. દરેક શરીર માટે આપણે સમીકરણ $∆p↖(→)=F↖(→)∆t$ લખી શકીએ છીએ. આ સમીકરણોની ડાબી અને જમણી બાજુઓ ઉમેરીને, આપણને મળે છે:
$(∆p_1)↖(→)+(∆p_2)↖(→)=(F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
ન્યૂટનના ત્રીજા નિયમ મુજબ, $(F_(12))↖(→)=-(F_(21))↖(→)$.
આથી,
$(∆p_1)↖(→)+(∆p_2)↖(→)=(F_1)↖(→)+(F_2)↖(→))∆t$
ડાબી બાજુએ સિસ્ટમના તમામ ભાગોના આવેગમાં ફેરફારનો ભૌમિતિક સરવાળો છે, જે સિસ્ટમના જ આવેગમાં ફેરફાર સમાન છે - $(∆p_(syst))↖(→)$ એકાઉન્ટ, સમાનતા $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ લખી શકાય છે:
$(∆p_(syst))↖(→)=F↖(→)∆t$
જ્યાં $F↖(→)$ એ શરીર પર કાર્ય કરતી તમામ બાહ્ય શક્તિઓનો સરવાળો છે. પ્રાપ્ત પરિણામનો અર્થ એ છે કે સિસ્ટમના વેગને ફક્ત બાહ્ય દળો દ્વારા બદલી શકાય છે, અને સિસ્ટમના વેગમાં ફેરફાર એ જ રીતે નિર્દેશિત કરવામાં આવે છે જેમ કે કુલ બાહ્ય બળ.
આ યાંત્રિક પ્રણાલીના વેગમાં પરિવર્તનના કાયદાનો સાર છે.
આંતરિક દળો સિસ્ટમના કુલ વેગને બદલી શકતા નથી. તેઓ ફક્ત સિસ્ટમના વ્યક્તિગત શરીરના આવેગને બદલે છે.
ગતિના સંરક્ષણનો કાયદો
સમીકરણ $(∆p_(syst))↖(→)=F↖(→)∆t$ થી વેગના સંરક્ષણનો નિયમ અનુસરે છે. જો સિસ્ટમ પર કોઈ બાહ્ય દળો કાર્ય ન કરે, તો સમીકરણની જમણી બાજુ $(∆p_(syst))↖(→)=F↖(→)∆t$ શૂન્ય બની જાય છે, જેનો અર્થ છે કે સિસ્ટમની કુલ ગતિ યથાવત રહે છે. :
$(∆p_(syst))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$ એવી સિસ્ટમ કે જેના પર કોઈ બાહ્ય દળો કાર્ય કરતું નથી અથવા બાહ્ય દળોનું પરિણામ શૂન્ય છે તેને કહેવામાં આવે છે
બંધ
ગતિના સંરક્ષણનો કાયદો જણાવે છે:
એક બીજા સાથે સિસ્ટમના શરીરની કોઈપણ ક્રિયાપ્રતિક્રિયા માટે શરીરની બંધ સિસ્ટમની કુલ ગતિ સ્થિર રહે છે.
મેળવેલ પરિણામ એ સિસ્ટમ માટે માન્ય છે જેમાં શરીરની મનસ્વી સંખ્યા હોય છે. જો બાહ્ય દળોનો સરવાળો શૂન્ય જેટલો ન હોય, પરંતુ અમુક દિશામાં તેમના અંદાજોનો સરવાળો શૂન્ય જેટલો હોય, તો આ દિશામાં સિસ્ટમના વેગનો અંદાજ બદલાતો નથી. તેથી, ઉદાહરણ તરીકે, પૃથ્વીની સપાટી પરના શરીરની પ્રણાલીને ગુરુત્વાકર્ષણ બળના કારણે તમામ શરીરો પર કામ કરતા બંધ ગણી શકાય નહીં, જો કે, આડી દિશામાં આવેગના અંદાજોનો સરવાળો યથાવત રહી શકે છે (ગેરહાજરીમાં ઘર્ષણ), કારણ કે આ દિશામાં ગુરુત્વાકર્ષણ બળ કામ કરતું નથી.
ચાલો આપણે એવા ઉદાહરણોને ધ્યાનમાં લઈએ જે વેગના સંરક્ષણના કાયદાની માન્યતાની પુષ્ટિ કરે છે.
ચાલો બાળકોનો રબરનો બોલ લઈએ, તેને ફૂલાવીએ અને તેને છોડો. આપણે જોઈશું કે જ્યારે હવા તેને એક દિશામાં છોડવાનું શરૂ કરશે, ત્યારે બોલ પોતે જ બીજી દિશામાં ઉડી જશે. બોલની ગતિ એ જેટ ગતિનું ઉદાહરણ છે. તે વેગના સંરક્ષણના કાયદા દ્વારા સમજાવવામાં આવ્યું છે: હવા બહાર વહેતા પહેલા "બોલ વત્તા તેમાં હવા" સિસ્ટમની કુલ ગતિ શૂન્ય છે; ચળવળ દરમિયાન તે શૂન્ય સમાન રહેવું જોઈએ; તેથી, બોલ જેટના પ્રવાહની દિશાની વિરુદ્ધ દિશામાં આગળ વધે છે, અને એટલી ઝડપે કે તેનો વેગ એર જેટના વેગની તીવ્રતામાં સમાન હોય છે.
જેટ ગતિશરીરની હિલચાલ કહે છે જે ત્યારે થાય છે જ્યારે તેનો અમુક ભાગ કોઈપણ ઝડપે તેનાથી અલગ થઈ જાય છે. વેગના સંરક્ષણના કાયદાને લીધે, શરીરની હિલચાલની દિશા અલગ પડેલા ભાગની હિલચાલની દિશાની વિરુદ્ધ છે.
રોકેટ ફ્લાઇટ્સ જેટ પ્રોપલ્શનના સિદ્ધાંત પર આધારિત છે. આધુનિક સ્પેસ રોકેટ એ ખૂબ જટિલ વિમાન છે. રોકેટના સમૂહમાં કાર્યકારી પ્રવાહીના સમૂહ (એટલે કે, બળતણના દહનના પરિણામે બનેલા ગરમ વાયુઓ અને જેટ પ્રવાહના સ્વરૂપમાં ઉત્સર્જિત) અને અંતિમ, અથવા, જેમ તેઓ કહે છે, "સૂકા" સમૂહનો સમાવેશ થાય છે. રોકેટમાંથી કામ કરતા પ્રવાહીને બહાર કાઢ્યા પછી બાકી રહેલું રોકેટ.
જ્યારે રોકેટમાંથી ગેસના જેટને વધુ ઝડપે બહાર કાઢવામાં આવે છે, ત્યારે રોકેટ પોતે જ વિરુદ્ધ દિશામાં ધસી આવે છે. મોમેન્ટમના સંરક્ષણના કાયદા અનુસાર, રોકેટ દ્વારા મેળવેલ વેગ $m_(p)υ_p$ એ બહાર નીકળેલા વાયુઓના વેગ $m_(ગેસ)·υ_(ગેસ)$ જેટલું હોવું જોઈએ:
$m_(p)υ_p=m_(ગેસ)·υ_(ગેસ)$
તે રોકેટની ગતિને અનુસરે છે
$υ_p=((m_(ગેસ))/(m_p))·υ_(ગેસ)$
આ સૂત્ર પરથી તે સ્પષ્ટ થાય છે કે રોકેટની ઝડપ જેટલી વધારે છે, તેટલી વધુ ઉત્સર્જિત વાયુઓની ગતિ અને કાર્યકારી પ્રવાહીના સમૂહ (એટલે કે, બળતણનો સમૂહ) અંતિમ ("સૂકા") સુધીનો ગુણોત્તર. રોકેટનો સમૂહ.
સૂત્ર $υ_p=((m_(ગેસ))/(m_p))·υ_(ગેસ)$ અંદાજિત છે. તે ધ્યાનમાં લેતું નથી કે જેમ જેમ બળતણ બળે છે તેમ તેમ ઉડતા રોકેટનું દળ ઓછું થતું જાય છે. રોકેટની ઝડપ માટેનું ચોક્કસ સૂત્ર 1897માં કે.ઇ. ત્સિઓલકોવ્સ્કીએ મેળવ્યું હતું અને તેનું નામ છે.
બળનું કામ
"કાર્ય" શબ્દ 1826 માં ફ્રેન્ચ વૈજ્ઞાનિક જે. પોન્સલેટ દ્વારા ભૌતિકશાસ્ત્રમાં દાખલ કરવામાં આવ્યો હતો. જો રોજિંદા જીવનમાં ફક્ત માનવ શ્રમને કામ કહેવામાં આવે છે, તો પછી ભૌતિકશાસ્ત્રમાં અને, ખાસ કરીને, મિકેનિક્સમાં તે સામાન્ય રીતે સ્વીકારવામાં આવે છે કે કાર્ય બળ દ્વારા કરવામાં આવે છે. કામની ભૌતિક માત્રા સામાન્ય રીતે $A$ અક્ષર દ્વારા સૂચવવામાં આવે છે.
બળનું કામબળની ક્રિયાનું માપ છે, તેની તીવ્રતા અને દિશા, તેમજ બળના ઉપયોગના બિંદુના વિસ્થાપન પર આધારિત છે. સતત બળ અને રેખીય વિસ્થાપન માટે, કાર્ય સમાનતા દ્વારા નક્કી કરવામાં આવે છે:
$A=F|∆r↖(→)|cosα$
જ્યાં $F$ એ શરીર પર કાર્ય કરતું બળ છે, $∆r↖(→)$ એ વિસ્થાપન છે, $α$ એ બળ અને વિસ્થાપન વચ્ચેનો ખૂણો છે.

બળનું કાર્ય બળ અને વિસ્થાપનના મોડ્યુલી અને તેમની વચ્ચેના કોણના કોસાઇનના ગુણાંક સમાન છે, એટલે કે, $F↖(→)$ અને $∆r↖(→)$ વેક્ટરના સ્કેલર ઉત્પાદન.
કાર્ય એ એક સ્કેલર જથ્થો છે. જો $α 0$, અને જો $90°
જ્યારે શરીર પર અનેક દળો કાર્ય કરે છે, ત્યારે કુલ કાર્ય (તમામ દળોના કાર્યનો સરવાળો) પરિણામી બળના કાર્ય સમાન હોય છે.
SI માં કામનું એકમ છે જુલ($1$ J). $1$ J એ આ બળની ક્રિયાની દિશામાં $1$m ના પાથ સાથે $1$ N ના બળ દ્વારા કરવામાં આવેલું કાર્ય છે. આ એકમનું નામ અંગ્રેજી વૈજ્ઞાનિક જે. જૌલ (1818-1889) ના નામ પરથી રાખવામાં આવ્યું છે: $1$ J = $1$ N $·$ m કિલોજુલ્સ અને મિલીજુલ્સનો પણ વારંવાર ઉપયોગ થાય છે: $1$ kJ $= 1,000$ J, $1$ mJ $. = $0.001 જે.
ગુરુત્વાકર્ષણનું કાર્ય
ચાલો ઝોકના ખૂણો $α$ અને ઊંચાઈ $H$ સાથે વળેલા વિમાન સાથે સરકતા શરીરને ધ્યાનમાં લઈએ.

ચાલો $H$ અને $α$ ના સંદર્ભમાં $∆x$ વ્યક્ત કરીએ:
$∆x=(H)/(sinα)$
$F_т=mg$નું ગુરુત્વાકર્ષણ બળ ચળવળની દિશા સાથે એક ખૂણો ($90° - α$) બનાવે છે તે ધ્યાનમાં લેતા, $∆x=(H)/(sin)α$ સૂત્રનો ઉપયોગ કરીને, અમે એક અભિવ્યક્તિ મેળવીએ છીએ ગુરુત્વાકર્ષણનું કાર્ય $A_g$:
$A_g=mg cos(90°-α) (H)/(sinα)=mgH$
આ સૂત્ર પરથી તે સ્પષ્ટ છે કે ગુરુત્વાકર્ષણ દ્વારા કરવામાં આવેલું કાર્ય ઊંચાઈ પર આધારિત છે અને તે પ્લેનના ઝોકના કોણ પર આધારિત નથી.
તે નીચે મુજબ છે:
- ગુરુત્વાકર્ષણનું કાર્ય શરીર જેની સાથે આગળ વધે છે તેના આકાર પર આધારિત નથી, પરંતુ માત્ર શરીરની પ્રારંભિક અને અંતિમ સ્થિતિ પર આધારિત છે;
- જ્યારે કોઈ શરીર બંધ માર્ગ સાથે આગળ વધે છે, ત્યારે ગુરુત્વાકર્ષણ દ્વારા કરવામાં આવેલું કાર્ય શૂન્ય હોય છે, એટલે કે, ગુરુત્વાકર્ષણ એક રૂઢિચુસ્ત બળ છે (જે બળો આ ગુણધર્મ ધરાવે છે તેને રૂઢિચુસ્ત કહેવામાં આવે છે).
પ્રતિક્રિયા દળોનું કાર્ય, શૂન્યની બરાબર છે, કારણ કે પ્રતિક્રિયા બળ ($N$) એ વિસ્થાપન $∆x$ પર કાટખૂણે નિર્દેશિત છે.
ઘર્ષણ બળનું કામ
ઘર્ષણ બળ વિસ્થાપન $∆x$ ની વિરુદ્ધ દિશામાન થાય છે અને તેની સાથે $180°$ નો ખૂણો બનાવે છે, તેથી ઘર્ષણ બળનું કાર્ય નકારાત્મક છે:
$A_(tr)=F_(tr)∆x·cos180°=-F_(tr)·∆x$
ત્યારથી $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ પછી
$A_(tr)=μmgHctgα$
સ્થિતિસ્થાપક બળનું કામ
બાહ્ય બળ $F↖(→)$ ને $l_0$ લંબાઈના અનસ્ટ્રેચ્ડ સ્પ્રિંગ પર કાર્ય કરવા દો, તેને $∆l_0=x_0$ સુધી ખેંચો. $x=x_0F_(control)=kx_0$ સ્થિતિમાં. બળ $F↖(→)$ બિંદુ $x_0$ પર કાર્ય કરવાનું બંધ કરે પછી, સ્પ્રિંગ બળ $F_(નિયંત્રણ)$ની ક્રિયા હેઠળ સંકુચિત થાય છે.

ચાલો સ્થિતિસ્થાપક બળનું કાર્ય નક્કી કરીએ જ્યારે વસંતના જમણા છેડાનો સંકલન $x_0$ થી $x$ માં બદલાય છે. આ વિસ્તારમાં સ્થિતિસ્થાપક બળ રેખીય રીતે બદલાતું હોવાથી, હૂકનો કાયદો આ વિસ્તારમાં તેના સરેરાશ મૂલ્યનો ઉપયોગ કરી શકે છે:
$F_(કંટ્રોલ av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
પછી કાર્ય (એ હકીકતને ધ્યાનમાં લેતા કે દિશા નિર્દેશો $(F_(નિયંત્રણ av.))↖(→)$ અને $(∆x)↖(→)$ એકરૂપ થાય છે) બરાબર છે:
$A_(નિયંત્રણ)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
તે બતાવી શકાય છે કે છેલ્લા સૂત્રનું સ્વરૂપ $(F_(નિયંત્રણ av.))↖(→)$ અને $(∆x)↖(→)$ વચ્ચેના ખૂણા પર આધારિત નથી. સ્થિતિસ્થાપક દળોનું કાર્ય ફક્ત પ્રારંભિક અને અંતિમ અવસ્થાઓમાં વસંતના વિરૂપતા પર આધારિત છે.
આમ, સ્થિતિસ્થાપક બળ, ગુરુત્વાકર્ષણ બળની જેમ, એક રૂઢિચુસ્ત બળ છે.
પાવર પાવર
શક્તિ એ એક ભૌતિક જથ્થો છે જે કામના ગુણોત્તર દ્વારા માપવામાં આવે છે તે સમયગાળા દરમિયાન તે ઉત્પન્ન થાય છે.
બીજા શબ્દોમાં કહીએ તો, પાવર બતાવે છે કે સમયના એકમ દીઠ કેટલું કામ થાય છે (SI માં - પ્રતિ $1$s).
પાવર સૂત્ર દ્વારા નક્કી કરવામાં આવે છે:
જ્યાં $N$ પાવર છે, $A$ એ $∆t$ સમય દરમિયાન કરવામાં આવેલું કામ છે.
$A$ તેના અભિવ્યક્તિ $A=F|(∆r)↖(→)|cosα$ કાર્યને બદલે $N=(A)/(∆t)$ ફોર્મ્યુલામાં સ્થાનાંતરિત કરવાથી, આપણે મેળવીએ છીએ:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
શક્તિ એ બળ અને વેગ વેક્ટરના પરિમાણ અને આ વેક્ટર્સ વચ્ચેના કોણના કોસાઇનના ઉત્પાદન સમાન છે.
SI સિસ્ટમમાં પાવર વોટ્સ (W) માં માપવામાં આવે છે. એક વોટ ($1$ W) એ પાવર છે કે જેના પર $1$ J કામ $1$s માટે થાય છે: $1$ W$= 1$ J/s.
આ એકમનું નામ અંગ્રેજી શોધક જે. વોટ (વૉટ)ના નામ પરથી રાખવામાં આવ્યું છે, જેમણે પ્રથમ સ્ટીમ એન્જિન બનાવ્યું હતું. જે. વોટ પોતે (1736-1819) પાવરના બીજા એકમ - હોર્સપાવર (એચપી) નો ઉપયોગ કરે છે, જે તેમણે રજૂ કર્યો હતો જેથી તે સ્ટીમ એન્જિન અને ઘોડાની કામગીરીની તુલના કરી શકે: $1$ એચપી. $= 735.5$ W.
ટેક્નોલોજીમાં, મોટા પાવર યુનિટનો વારંવાર ઉપયોગ થાય છે - કિલોવોટ અને મેગાવોટ: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
ગતિ ઊર્જા. ગતિ ઊર્જાના પરિવર્તનનો કાયદો
જો કોઈ શરીર અથવા અનેક ક્રિયાપ્રતિક્રિયા કરતી સંસ્થાઓ (શરીરની સિસ્ટમ) કામ કરી શકે છે, તો તેઓને ઊર્જા હોવાનું કહેવાય છે.
"ઊર્જા" શબ્દ (ગ્રીક એનર્જીઆમાંથી - ક્રિયા, પ્રવૃત્તિ) નો ઉપયોગ રોજિંદા જીવનમાં વારંવાર થાય છે. ઉદાહરણ તરીકે, જે લોકો ઝડપથી કામ કરી શકે છે તેઓને મહેનતુ કહેવાય છે, તેઓ મહાન ઊર્જા ધરાવે છે.
ગતિને કારણે શરીરમાં રહેલી ઊર્જાને ગતિ ઊર્જા કહેવામાં આવે છે.
સામાન્ય રીતે ઊર્જાની વ્યાખ્યાના કિસ્સામાં, આપણે ગતિ ઊર્જા વિશે કહી શકીએ કે ગતિ ઊર્જા એ ગતિશીલ શરીરની કાર્ય કરવાની ક્ષમતા છે.
ચાલો આપણે $m$ ની ગતિએ $υ$ ની ગતિ સાથે ગતિશીલ શરીરની ગતિ ઊર્જા શોધીએ. ગતિ ઊર્જા ગતિને કારણે ઊર્જા હોવાથી, તેની શૂન્ય સ્થિતિ એ એવી સ્થિતિ છે જેમાં શરીર આરામ કરે છે. શરીરને આપેલ ગતિ પ્રદાન કરવા માટે જરૂરી કાર્ય શોધી કાઢ્યા પછી, આપણે તેની ગતિ ઊર્જા શોધીશું.
આ કરવા માટે, ચાલો વિસ્થાપન $∆r↖(→)$ ના ક્ષેત્રમાં કાર્યની ગણતરી કરીએ જ્યારે બળ વેક્ટર $F↖(→)$ અને ડિસ્પ્લેસમેન્ટ $∆r↖(→)$ એકરૂપ થાય. આ કિસ્સામાં કામ સમાન છે
જ્યાં $∆x=∆r$
પ્રવેગક $α=const$ સાથે બિંદુની ગતિ માટે, વિસ્થાપન માટેની અભિવ્યક્તિનું સ્વરૂપ છે:
$∆x=υ_1t+(at^2)/(2),$
જ્યાં $υ_1$ એ પ્રારંભિક ગતિ છે.
$∆x$ માટે સમીકરણ $A=F·∆x$ માં $∆x=υ_1t+(at^2)/(2)$ માંથી અવેજીમાં અને ન્યૂટનના બીજા નિયમ $F=ma$નો ઉપયોગ કરીને, અમે મેળવીએ છીએ:
$A=ma(υ_1t+(at^2)/(2))=(મેટ)/(2)(2υ_1+at)$
પ્રારંભિક $υ_1$ અને અંતિમ $υ_2$ વેગ દ્વારા પ્રવેગને વ્યક્ત કરવો $a=(υ_2-υ_1)/(t)$ અને $A=ma(υ_1t+(at^2)/(2))=(મેટ )/ (2)(2υ_1+at)$ અમારી પાસે છે:
$A=(m(υ_2-υ_1))/(2)·(2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
હવે પ્રારંભિક ઝડપને શૂન્ય સાથે સરખાવીએ છીએ: $υ_1=0$, અમે તેના માટે અભિવ્યક્તિ મેળવીએ છીએ ગતિ ઊર્જા:
$E_K=(mυ)/(2)=(p^2)/(2m)$
આમ, ગતિશીલ શરીરમાં ગતિ ઊર્જા હોય છે. આ ઉર્જા એ કાર્યની બરાબર છે જે શરીરની ગતિને શૂન્યથી મૂલ્ય $υ$ સુધી વધારવા માટે થવી જોઈએ.
$E_K=(mυ)/(2)=(p^2)/(2m)$ થી તે અનુસરે છે કે શરીરને એક સ્થાનથી બીજી સ્થિતિમાં ખસેડવા માટે બળ દ્વારા કરવામાં આવેલ કાર્ય ગતિ ઊર્જામાં ફેરફાર સમાન છે:
$A=E_(K_2)-E_(K_1)=∆E_K$
સમાનતા $A=E_(K_2)-E_(K_1)=∆E_K$ વ્યક્ત કરે છે ગતિ ઊર્જામાં ફેરફાર પર પ્રમેય.
શરીરની ગતિ ઊર્જામાં ફેરફાર(સામગ્રી બિંદુ) ચોક્કસ સમયગાળા માટે શરીર પર કાર્ય કરતા બળ દ્વારા આ સમય દરમિયાન કરવામાં આવેલ કાર્ય સમાન છે.
સંભવિત ઊર્જા
પોટેન્શિયલ એનર્જી એ ઉર્જા છે જે ક્રિયાપ્રતિક્રિયા કરતી સંસ્થાઓ અથવા સમાન શરીરના ભાગોની સંબંધિત સ્થિતિ દ્વારા નક્કી કરવામાં આવે છે.
કારણ કે ઊર્જાને શરીરની કાર્ય કરવાની ક્ષમતા તરીકે વ્યાખ્યાયિત કરવામાં આવી છે, સંભવિત ઊર્જાને કુદરતી રીતે બળ દ્વારા કરવામાં આવેલ કાર્ય તરીકે વ્યાખ્યાયિત કરવામાં આવે છે, ફક્ત શરીરની સંબંધિત સ્થિતિ પર આધાર રાખીને. આ ગુરુત્વાકર્ષણ $A=mgh_1-mgh_2=mgH$ અને સ્થિતિસ્થાપકતાનું કાર્ય છે:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
શરીરની સંભવિત ઊર્જાપૃથ્વી સાથે ક્રિયાપ્રતિક્રિયા કરીને, તેઓ મુક્ત પતન $g$ અને પૃથ્વીની સપાટીથી ઉપરના શરીરની ઊંચાઈ $h$ ના પ્રવેગ દ્વારા આ શરીરના સમૂહ $m$ના ઉત્પાદનના સમાન જથ્થાને કહે છે:
સ્થિતિસ્થાપક રીતે વિકૃત શરીરની સંભવિત ઊર્જા એ શરીરના સ્થિતિસ્થાપકતા (જડતા) ગુણાંક $k$ અને વિરૂપતા $∆l$ના ચોરસના અડધા ઉત્પાદન જેટલું મૂલ્ય છે:
$E_p=(1)/(2)k∆l^2$
રૂઢિચુસ્ત દળોનું કાર્ય (ગુરુત્વાકર્ષણ અને સ્થિતિસ્થાપકતા), $E_p=mgh$ અને $E_p=(1)/(2)k∆l^2$ને ધ્યાનમાં લેતા, નીચે પ્રમાણે વ્યક્ત કરવામાં આવે છે:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
આ સૂત્ર આપણને સંભવિત ઊર્જાની સામાન્ય વ્યાખ્યા આપવા દે છે.
સિસ્ટમની સંભવિત ઉર્જા એ એક જથ્થો છે જે શરીરની સ્થિતિ પર આધાર રાખે છે, જેમાં સિસ્ટમના પ્રારંભિક સ્થિતિથી અંતિમ સ્થિતિમાં સંક્રમણ દરમિયાન ફેરફાર સિસ્ટમના આંતરિક રૂઢિચુસ્ત દળોના કાર્ય સમાન હોય છે, વિરુદ્ધ ચિહ્ન સાથે લેવામાં આવે છે.
સમીકરણ $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ નો અર્થ છે કે જ્યારે કામ આંતરિક દળો દ્વારા કરવામાં આવે છે ( ઉદાહરણ તરીકે, "રોક-અર્થ" સિસ્ટમમાં ગુરુત્વાકર્ષણના પ્રભાવ હેઠળ જમીન પર પડેલા શરીર), સિસ્ટમની ઊર્જા ઘટે છે. સિસ્ટમમાં કાર્ય અને સંભવિત ઉર્જામાં ફેરફારો હંમેશા વિરોધી ચિહ્નો ધરાવે છે.
કારણ કે કાર્ય માત્ર સંભવિત ઊર્જામાં ફેરફાર નક્કી કરે છે, પછી માત્ર ઊર્જામાં ફેરફારનો મિકેનિક્સમાં ભૌતિક અર્થ છે. તેથી, શૂન્ય ઉર્જા સ્તરની પસંદગી મનસ્વી છે અને તે ફક્ત અનુકૂળતાના વિચારણાઓ દ્વારા નક્કી કરવામાં આવે છે, ઉદાહરણ તરીકે, અનુરૂપ સમીકરણો લખવામાં સરળતા.
યાંત્રિક ઊર્જાના પરિવર્તન અને સંરક્ષણનો કાયદો
સિસ્ટમની કુલ યાંત્રિક ઊર્જાતેની ગતિ અને સંભવિત ઊર્જાનો સરવાળો કહેવાય છે:
તે શરીરની સ્થિતિ (સંભવિત ઊર્જા) અને તેમની ગતિ (ગતિ ઊર્જા) દ્વારા નક્કી કરવામાં આવે છે.
ગતિ ઊર્જા પ્રમેય મુજબ,
$E_k-E_(k_1)=A_p+A_(pr),$
જ્યાં $A_p$ એ સંભવિત દળોનું કાર્ય છે, $A_(pr)$ એ બિન-સંભવિત દળોનું કાર્ય છે.
બદલામાં, સંભવિત દળોનું કાર્ય પ્રારંભિક $E_(p_1)$ અને અંતિમ $E_p$ અવસ્થાઓમાં શરીરની સંભવિત ઊર્જામાં તફાવત સમાન છે. આને ધ્યાનમાં લેતા, અમે માટે અભિવ્યક્તિ મેળવીએ છીએ યાંત્રિક ઉર્જાના પરિવર્તનનો કાયદો:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
જ્યાં સમાનતાની ડાબી બાજુ કુલ યાંત્રિક ઊર્જામાં ફેરફાર છે અને જમણી બાજુ બિન-સંભવિત દળોનું કાર્ય છે.
તેથી, યાંત્રિક ઊર્જા પરિવર્તનનો કાયદોવાંચે છે:
સિસ્ટમની યાંત્રિક ઊર્જામાં ફેરફાર એ તમામ બિન-સંભવિત દળોના કાર્ય સમાન છે.
એક યાંત્રિક પ્રણાલી જેમાં માત્ર સંભવિત દળો કાર્ય કરે છે તેને રૂઢિચુસ્ત કહેવામાં આવે છે.
રૂઢિચુસ્ત સિસ્ટમમાં $A_(pr) = 0$. તે અનુસરે છે યાંત્રિક ઊર્જાના સંરક્ષણનો કાયદો:
બંધ રૂઢિચુસ્ત પ્રણાલીમાં, કુલ યાંત્રિક ઊર્જા સચવાય છે (સમય સાથે બદલાતી નથી):
$E_k+E_p=E_(k_1)+E_(p_1)$
યાંત્રિક ઉર્જાના સંરક્ષણનો કાયદો ન્યૂટનના મિકેનિક્સના નિયમોમાંથી ઉતરી આવ્યો છે, જે ભૌતિક બિંદુઓ (અથવા મેક્રોપાર્ટિકલ્સ) ની સિસ્ટમને લાગુ પડે છે.
જો કે, યાંત્રિક ઉર્જાના સંરક્ષણનો કાયદો માઇક્રોપાર્ટિકલ્સની સિસ્ટમ માટે પણ માન્ય છે, જ્યાં ન્યૂટનના નિયમો હવે લાગુ પડતા નથી.
યાંત્રિક ઊર્જાના સંરક્ષણનો કાયદો સમયની એકરૂપતાનું પરિણામ છે.
સમયની એકરૂપતાતે છે કે, સમાન પ્રારંભિક પરિસ્થિતિઓમાં, ભૌતિક પ્રક્રિયાઓની ઘટના આ પરિસ્થિતિઓ કયા સમયે બનાવવામાં આવે છે તેના પર નિર્ભર નથી.
કુલ યાંત્રિક ઊર્જાના સંરક્ષણના નિયમનો અર્થ એ છે કે જ્યારે રૂઢિચુસ્ત પ્રણાલીમાં ગતિ ઊર્જા બદલાય છે, ત્યારે તેની સંભવિત ઊર્જા પણ બદલવી જોઈએ, જેથી તેમનો સરવાળો સ્થિર રહે. આનો અર્થ એ છે કે એક પ્રકારની ઊર્જાને બીજામાં રૂપાંતરિત કરવાની શક્યતા.
દ્રવ્યની ગતિના વિવિધ સ્વરૂપોને અનુરૂપ, વિવિધ પ્રકારની ઉર્જા ગણવામાં આવે છે: યાંત્રિક, આંતરિક (શરીરના સમૂહના કેન્દ્રને સંબંધિત પરમાણુઓની અસ્તવ્યસ્ત ચળવળની ગતિ ઊર્જાના સરવાળાની બરાબર અને સંભવિત ઊર્જા. પરમાણુઓની એકબીજા સાથેની ક્રિયાપ્રતિક્રિયા), ઇલેક્ટ્રોમેગ્નેટિક, રાસાયણિક (જેમાં ઇલેક્ટ્રોનની હિલચાલની ગતિ ઊર્જા અને વિદ્યુત ઊર્જા એકબીજા સાથે અને પરમાણુ મધ્યવર્તી કેન્દ્ર સાથેની ક્રિયાપ્રતિક્રિયાનો સમાવેશ થાય છે), પરમાણુ, વગેરે. ઉપરથી તે સ્પષ્ટ છે કે વિવિધ પ્રકારોમાં ઊર્જાનું વિભાજન તદ્દન મનસ્વી છે.
કુદરતી ઘટના સામાન્ય રીતે એક પ્રકારની ઊર્જાના બીજામાં રૂપાંતર સાથે હોય છે. ઉદાહરણ તરીકે, વિવિધ મિકેનિઝમ્સના ભાગોનું ઘર્ષણ ગરમીમાં યાંત્રિક ઊર્જાના રૂપાંતર તરફ દોરી જાય છે, એટલે કે. આંતરિક ઊર્જા.હીટ એન્જિનમાં, તેનાથી વિપરીત, આંતરિક ઊર્જા યાંત્રિક ઊર્જામાં રૂપાંતરિત થાય છે; ગેલ્વેનિક કોષોમાં રાસાયણિક ઉર્જા વિદ્યુત ઉર્જા વગેરેમાં રૂપાંતરિત થાય છે.
હાલમાં, ઊર્જાની વિભાવના એ ભૌતિકશાસ્ત્રની મૂળભૂત વિભાવનાઓમાંની એક છે. આ ખ્યાલ એક સ્વરૂપના ચળવળના બીજામાં પરિવર્તનના વિચાર સાથે અસ્પષ્ટ રીતે જોડાયેલો છે.
આધુનિક ભૌતિકશાસ્ત્રમાં ઉર્જાનો ખ્યાલ આ રીતે ઘડવામાં આવે છે:
ઉર્જા એ તમામ પ્રકારના પદાર્થોની હિલચાલ અને ક્રિયાપ્રતિક્રિયાનું સામાન્ય માત્રાત્મક માપ છે. ઊર્જા કંઈપણમાંથી દેખાતી નથી અને અદૃશ્ય થતી નથી, તે ફક્ત એક સ્વરૂપમાંથી બીજામાં જઈ શકે છે. ઉર્જાનો ખ્યાલ તમામ કુદરતી ઘટનાઓને એક સાથે જોડે છે.
સરળ મિકેનિઝમ્સ. મિકેનિઝમ કાર્યક્ષમતા
સરળ મિકેનિઝમ્સ એવા ઉપકરણો છે જે શરીર પર લાગુ થતા દળોની તીવ્રતા અથવા દિશાને બદલે છે.
તેઓનો ઉપયોગ ઓછા પ્રયત્નો સાથે મોટા ભારને ખસેડવા અથવા ઉપાડવા માટે થાય છે. આમાં લીવર અને તેની જાતો - બ્લોક્સ (મૂવેબલ અને ફિક્સ્ડ), દરવાજા, વળેલું પ્લેન અને તેની જાતો - ફાચર, સ્ક્રૂ વગેરેનો સમાવેશ થાય છે.
લીવર. લીવરેજ નિયમ
લીવર એ એક કઠોર શરીર છે જે નિશ્ચિત આધારની આસપાસ ફેરવવામાં સક્ષમ છે.

લીવરેજનો નિયમ કહે છે:
લીવર સંતુલનમાં હોય છે જો તેના પર લાગુ દળો તેના હાથના વિપરિત પ્રમાણસર હોય:
$(F_2)/(F_1)=(l_1)/(l_2)$
ફોર્મ્યુલામાંથી $(F_2)/(F_1)=(l_1)/(l_2)$, તેના પર પ્રમાણની ગુણધર્મ લાગુ કરીને (પ્રમાણની આત્યંતિક શરતોનું ઉત્પાદન તેના મધ્યમ પદોના ઉત્પાદન સમાન છે), અમે નીચેના સૂત્ર મેળવી શકો છો:
પરંતુ $F_1l_1=M_1$ એ લીવરને ઘડિયાળની દિશામાં ફેરવવા માટે બળની ક્ષણ છે, અને $F_2l_2=M_2$ એ બળની ક્ષણ છે જે લીવરને ઘડિયાળની વિરુદ્ધ દિશામાં ફેરવવાનો પ્રયાસ કરે છે. આમ, $M_1=M_2$, જે સાબિત કરવાની જરૂર છે.
લિવર પ્રાચીન સમયમાં લોકો દ્વારા ઉપયોગમાં લેવાનું શરૂ થયું. તેની મદદથી, પ્રાચીન ઇજિપ્તમાં પિરામિડના નિર્માણ દરમિયાન ભારે પથ્થરના સ્લેબને ઉપાડવાનું શક્ય હતું. લીવરેજ વિના આ શક્ય નથી. છેવટે, ઉદાહરણ તરીકે, ચેપ્સ પિરામિડના નિર્માણ માટે, જેની ઊંચાઈ $147$ મીટર છે, બે મિલિયનથી વધુ પથ્થરના બ્લોક્સનો ઉપયોગ કરવામાં આવ્યો હતો, જેમાંથી સૌથી નાનાનું વજન $2.5$ ટન હતું!
આજકાલ, ઉત્પાદન (ઉદાહરણ તરીકે, ક્રેન્સ) અને રોજિંદા જીવનમાં (કાતર, વાયર કટર, ભીંગડા) બંનેમાં લિવરનો વ્યાપકપણે ઉપયોગ થાય છે.
સ્થિર બ્લોક
નિશ્ચિત બ્લોકની ક્રિયા સમાન હાથ સાથે લિવરની ક્રિયા જેવી જ છે: $l_1=l_2=r$. લાગુ બળ $F_1$ લોડ $F_2$ જેટલું છે, અને સંતુલન સ્થિતિ છે:
સ્થિર બ્લોકજ્યારે તમારે બળની તીવ્રતા બદલ્યા વિના તેની દિશા બદલવાની જરૂર હોય ત્યારે વપરાય છે.
જંગમ બ્લોક
મૂવિંગ બ્લોક લિવરની જેમ જ કાર્ય કરે છે જેના હાથ છે: $l_2=(l_1)/(2)=r$. આ કિસ્સામાં, સંતુલન સ્થિતિનું સ્વરૂપ છે:
જ્યાં $F_1$ એ લાગુ બળ છે, $F_2$ એ ભાર છે. મૂવિંગ બ્લોકનો ઉપયોગ તાકાતમાં બેવડો ફાયદો આપે છે.
પુલી હોસ્ટ (બ્લોક સિસ્ટમ)

સામાન્ય સાંકળ ફરકાવતા $n$ મૂવિંગ અને $n$ ફિક્સ્ડ બ્લોક્સ ધરાવે છે. તેનો ઉપયોગ કરવાથી $2n$ ગણો મજબૂતાઈ મળે છે:
$F_1=(F_2)/(2n)$
પાવર સાંકળ ફરકાવવું n જંગમ અને એક નિશ્ચિત બ્લોકનો સમાવેશ થાય છે. પાવર પુલીનો ઉપયોગ $2^n$ ગણો મજબૂતાઈ આપે છે:
$F_1=(F_2)/(2^n)$

સ્ક્રૂ
સ્ક્રૂ એ ધરીની આસપાસ વળેલું વિમાન છે.

પ્રોપેલર પર કામ કરતા દળો માટે સંતુલન સ્થિતિનું સ્વરૂપ છે:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

જ્યાં $F_1$ એ બાહ્ય બળ છે જે પ્રોપેલર પર લાગુ થાય છે અને તેની ધરીથી $R$ ના અંતરે કાર્ય કરે છે; $F_2$ એ પ્રોપેલર અક્ષની દિશામાં કામ કરતું બળ છે; $h$ — પ્રોપેલર પિચ; $r$ એ સરેરાશ થ્રેડ ત્રિજ્યા છે; $α$ એ થ્રેડના ઝોકનો કોણ છે. $R$ એ $F_1$ ના બળ સાથે સ્ક્રુને ફેરવતા લીવર (રેંચ) ની લંબાઈ છે.
કાર્યક્ષમતા
કાર્યક્ષમતાનો ગુણાંક (કાર્યક્ષમતા) એ ઉપયોગી કાર્ય અને ખર્ચ કરેલ તમામ કાર્યનો ગુણોત્તર છે.
કાર્યક્ષમતાને ઘણીવાર ટકાવારી તરીકે દર્શાવવામાં આવે છે અને ગ્રીક અક્ષર $η$ ("આ") દ્વારા સૂચવવામાં આવે છે:
$η=(A_p)/(A_3)·100%$
જ્યાં $A_p$ એ ઉપયોગી કાર્ય છે, $A_3$ એ તમામ ખર્ચ કરેલ કાર્ય છે.
ઉપયોગી કાર્ય હંમેશા કુલ કાર્યનો માત્ર એક ભાગ બનાવે છે જે વ્યક્તિ એક અથવા બીજી પદ્ધતિનો ઉપયોગ કરીને ખર્ચ કરે છે.
કરેલા કામનો એક ભાગ ઘર્ષણકારી દળોને દૂર કરવા માટે ખર્ચવામાં આવે છે. $A_3 > A_n$ થી, કાર્યક્ષમતા હંમેશા $1$ (અથવા $< 100%$).
આ સમાનતામાં દરેક કાર્યને અનુરૂપ બળ અને મુસાફરી કરેલ અંતરના ઉત્પાદન તરીકે વ્યક્ત કરી શકાય છે, તેથી તેને નીચે પ્રમાણે ફરીથી લખી શકાય છે: $F_1s_1≈F_2s_2$.
તે અનુસરે છે કે, અમલમાં રહેલી મિકેનિઝમની મદદથી જીતવાથી, આપણે રસ્તામાં તેટલી જ વાર હારી જઈએ છીએ અને ઊલટું. આ નિયમને મિકેનિક્સનો સુવર્ણ નિયમ કહેવામાં આવે છે.
મિકેનિક્સનો સુવર્ણ નિયમ એ અંદાજિત કાયદો છે, કારણ કે તે ઉપયોગમાં લેવાતા ઉપકરણોના ભાગોના ઘર્ષણ અને ગુરુત્વાકર્ષણને દૂર કરવાના કાર્યને ધ્યાનમાં લેતું નથી. તેમ છતાં, તે કોઈપણ સરળ મિકેનિઝમની કામગીરીનું વિશ્લેષણ કરવામાં ખૂબ ઉપયોગી થઈ શકે છે.

તેથી, ઉદાહરણ તરીકે, આ નિયમનો આભાર, અમે તરત જ કહી શકીએ છીએ કે આકૃતિમાં બતાવેલ કાર્યકર, ભારને $10$ સે.મી.નો ભાર ઉપાડવાના બળમાં ડબલ ગેઇન સાથે, લીવરના વિરુદ્ધ છેડાને $20 જેટલો ઓછો કરવો પડશે. $ સે.મી.
શરીરની અથડામણ. સ્થિતિસ્થાપક અને સ્થિતિસ્થાપક અસરો
અથડામણ પછી શરીરની ગતિની સમસ્યાને ઉકેલવા માટે વેગ અને યાંત્રિક ઉર્જાના સંરક્ષણના નિયમોનો ઉપયોગ કરવામાં આવે છે: અથડામણ પહેલા જાણીતા આવેગ અને શક્તિઓમાંથી, આ જથ્થાના મૂલ્યો અથડામણ પછી નક્કી કરવામાં આવે છે. ચાલો સ્થિતિસ્થાપક અને સ્થિતિસ્થાપક અસરોના કિસ્સાઓ ધ્યાનમાં લઈએ.
અસરને એકદમ અસ્થિર કહેવામાં આવે છે, જેના પછી શરીર ચોક્કસ ગતિએ આગળ વધીને એક શરીર બનાવે છે. અસર પહેલા અને પછી $m_1$ અને $m_2$ (જો આપણે બે શરીર વિશે વાત કરીએ છીએ) સાથેના શરીરની સિસ્ટમના વેગના સંરક્ષણના કાયદાનો ઉપયોગ કરીને બાદની ગતિની સમસ્યા હલ કરવામાં આવે છે:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
તે સ્પષ્ટ છે કે અસ્થિર અસર દરમિયાન શરીરની ગતિ ઊર્જા સાચવવામાં આવતી નથી (ઉદાહરણ તરીકે, $(υ_1)↖(→)=-(υ_2)↖(→)$ અને $m_1=m_2$ માટે તે શૂન્યની બરાબર થઈ જાય છે. અસર પછી).
એવી અસર કે જેમાં માત્ર આવેગનો સરવાળો જ નહીં, પણ અસર કરતી સંસ્થાઓની ગતિ શક્તિઓનો સરવાળો પણ એકદમ સ્થિતિસ્થાપક કહેવાય છે.
એકદમ સ્થિતિસ્થાપક અસર માટે, નીચેના સમીકરણો માન્ય છે:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
જ્યાં $m_1, m_2$ એ દડાનો સમૂહ છે, $υ_1, υ_2$ એ અસર પહેલાંના દડાનો વેગ છે, $υ"_1, υ"_2$ એ અસર પછીના દડાનો વેગ છે.
તેની હિલચાલ, એટલે કે. કદ
પલ્સવેગ વેક્ટર સાથે દિશામાં એકરુપ વેક્ટર જથ્થો છે.
આવેગનું SI એકમ: kg m/s .
શરીરની સિસ્ટમનો વેગ એ સિસ્ટમમાં સમાવિષ્ટ તમામ સંસ્થાઓના વેક્ટરના સરવાળા સમાન છે:
આંતરિક દળો સિસ્ટમના કુલ વેગને બદલી શકતા નથી. તેઓ ફક્ત સિસ્ટમના વ્યક્તિગત શરીરના આવેગને બદલે છે.
જો ક્રિયાપ્રતિક્રિયા કરતી સંસ્થાઓની સિસ્ટમ પર બાહ્ય દળો દ્વારા પણ કાર્ય કરવામાં આવે છે, ઉદાહરણ તરીકે, તો આ કિસ્સામાં સંબંધ માન્ય છે, જેને ક્યારેક વેગ પરિવર્તનનો કાયદો કહેવામાં આવે છે:

બંધ સિસ્ટમ માટે (બાહ્ય દળોની ગેરહાજરીમાં), વેગના સંરક્ષણનો કાયદો માન્ય છે:
રાઇફલમાંથી ગોળીબાર કરતી વખતે અથવા તોપખાનામાં ગોળીબાર કરતી વખતે ગતિના સંરક્ષણનો કાયદો રીકોઇલની ઘટનાને સમજાવી શકે છે. ઉપરાંત, વેગના સંરક્ષણનો કાયદો તમામ જેટ એન્જિનના સંચાલનના સિદ્ધાંતને નીચે આપે છે.
ભૌતિક સમસ્યાઓ હલ કરતી વખતે, ગતિના સંરક્ષણના કાયદાનો ઉપયોગ થાય છે જ્યારે ચળવળની તમામ વિગતોનું જ્ઞાન જરૂરી નથી, પરંતુ શરીરની ક્રિયાપ્રતિક્રિયાનું પરિણામ મહત્વપૂર્ણ છે. આવી સમસ્યાઓ, ઉદાહરણ તરીકે, શરીરની અસર અથવા અથડામણ વિશેની સમસ્યાઓ છે. પ્રક્ષેપણ વાહનો જેવા ચલ દળના શરીરની ગતિને ધ્યાનમાં લેતી વખતે વેગના સંરક્ષણનો કાયદો વપરાય છે. આવા રોકેટનો મોટાભાગનો સમૂહ બળતણ છે. ફ્લાઇટના સક્રિય તબક્કા દરમિયાન, આ બળતણ બળી જાય છે, અને માર્ગના આ ભાગમાં રોકેટનો સમૂહ ઝડપથી ઘટે છે. ઉપરાંત, વિભાવના લાગુ ન હોય તેવા કિસ્સાઓમાં વેગના સંરક્ષણનો કાયદો જરૂરી છે. એવી પરિસ્થિતિની કલ્પના કરવી મુશ્કેલ છે કે જ્યાં સ્થિર શરીર તરત જ ચોક્કસ ગતિ પ્રાપ્ત કરે છે. સામાન્ય વ્યવહારમાં, શરીર હંમેશા વેગ આપે છે અને ધીમે ધીમે ઝડપ મેળવે છે. જો કે, જ્યારે ઇલેક્ટ્રોન અને અન્ય સબએટોમિક કણો ખસેડે છે, ત્યારે તેમની સ્થિતિ મધ્યવર્તી અવસ્થામાં રહ્યા વિના અચાનક બદલાય છે. આવા કિસ્સાઓમાં, "પ્રવેગક" ની શાસ્ત્રીય ખ્યાલ લાગુ કરી શકાતી નથી.
સમસ્યા હલ કરવાના ઉદાહરણો
ઉદાહરણ 1
| વ્યાયામ | 100 કિગ્રા વજન ધરાવતું અસ્ત્ર, 500 મીટર/સેકન્ડની ઝડપે રેલ્વે ટ્રેક પર આડું ઊડતું, 10 ટન વજનની રેતીવાળી ગાડીને અથડાવે છે અને તેમાં ફસાઈ જાય છે. જો કાર અસ્ત્રની ગતિની વિરુદ્ધ દિશામાં 36 કિમી/કલાકની ઝડપે આગળ વધે તો તેને કેટલી ઝડપ મળશે? |
| ઉકેલ | કાર + અસ્ત્ર સિસ્ટમ બંધ છે, તેથી આ કિસ્સામાં વેગ સંરક્ષણનો કાયદો લાગુ કરી શકાય છે. ચાલો એક ડ્રોઇંગ બનાવીએ, જે ક્રિયાપ્રતિક્રિયા પહેલા અને પછીના શરીરની સ્થિતિ દર્શાવે છે.
જ્યારે અસ્ત્ર અને કાર ક્રિયાપ્રતિક્રિયા કરે છે, ત્યારે એક સ્થિતિસ્થાપક અસર થાય છે. આ કિસ્સામાં વેગના સંરક્ષણનો કાયદો આ રીતે લખવામાં આવશે: કારની હિલચાલની દિશા સાથે સુસંગત અક્ષની દિશા પસંદ કરીને, અમે આ સમીકરણના પ્રક્ષેપણને સંકલન અક્ષ પર લખીએ છીએ: અસ્ત્ર અથડાયા પછી કારની ગતિ ક્યાંથી આવે છે:
અમે એકમોને SI સિસ્ટમમાં કન્વર્ટ કરીએ છીએ: t kg. ચાલો ગણતરી કરીએ: |
| જવાબ આપો | શેલ અથડાયા પછી, કાર 5 m/s ની ઝડપે આગળ વધશે. |


ઉદાહરણ 2
| વ્યાયામ | m=10 kg વજનના અસ્ત્રની ઝડપ ટોચના બિંદુ પર v=200 m/s હતી. આ સમયે તે બે ભાગમાં વિભાજિત થઈ ગયું. દળ m 1 =3 kg સાથેના નાના ભાગને આડી તરફના ખૂણા પર સમાન દિશામાં v 1 = 400 m/s ઝડપ પ્રાપ્ત થઈ છે. મોટા ભાગના અસ્ત્ર કઈ ઝડપે અને કઈ દિશામાં ઉડશે? |
| ઉકેલ | અસ્ત્રનો માર્ગ એક પેરાબોલા છે. શરીરની ગતિ હંમેશા સ્પર્શક રીતે બોલ તરફ નિર્દેશિત થાય છે. પ્રક્ષેપણના ટોચના બિંદુ પર, અસ્ત્રનો વેગ અક્ષની સમાંતર છે.
ચાલો વેગના સંરક્ષણનો કાયદો લખીએ: ચાલો વેક્ટરમાંથી સ્કેલર જથ્થામાં જઈએ. આ કરવા માટે, ચાલો વેક્ટર સમાનતાની બંને બાજુઓને ચોરસ કરીએ અને આ માટેના સૂત્રોનો ઉપયોગ કરીએ: ધ્યાનમાં લેતા કે , અને તે પણ , આપણે બીજા ટુકડાની ગતિ શોધીએ છીએ: ભૌતિક જથ્થાના આંકડાકીય મૂલ્યોને પરિણામી સૂત્રમાં બદલીને, અમે ગણતરી કરીએ છીએ: અમે મોટાભાગના અસ્ત્રની ફ્લાઇટ દિશા નિર્ધારિત કરીએ છીએ:
સૂત્રમાં સંખ્યાત્મક મૂલ્યોને બદલીને, અમને મળે છે: |
| જવાબ આપો | મોટા ભાગના અસ્ત્રો આડી દિશામાં 249 મીટર/સેકન્ડની ઝડપે નીચે ઉડશે. |



ઉદાહરણ 3
| વ્યાયામ | ટ્રેનનું દળ 3000 ટન છે ઘર્ષણ ગુણાંક 0.02 છે. ટ્રેનની ગતિ શરૂ થયાના 2 મિનિટ પછી 60 કિમી/કલાકની ઝડપે પહોંચવા માટે કેવા પ્રકારનું લોકોમોટિવ હોવું જોઈએ? |
| ઉકેલ | ટ્રેન પર (બાહ્ય બળ) દ્વારા કાર્યવાહી કરવામાં આવતી હોવાથી, સિસ્ટમને બંધ ગણી શકાય નહીં, અને આ કિસ્સામાં વેગના સંરક્ષણનો કાયદો સંતુષ્ટ નથી. ચાલો વેગ પરિવર્તનના નિયમનો ઉપયોગ કરીએ: ઘર્ષણ બળ હંમેશા શરીરની હિલચાલની વિરુદ્ધ દિશામાં નિર્દેશિત હોવાથી, ઘર્ષણ બળ આવેગ સમીકરણના પ્રક્ષેપણમાં સંકલન ધરી પર પ્રવેશ કરશે (અક્ષની દિશા ટ્રેનની ગતિની દિશા સાથે એકરુપ છે) "માઈનસ" ચિહ્ન: |