a 1 = { 3, 5, 1 , 4 }, a 2 = { –2, 1, -5 , -7 }, a 3 = { -1, –2, 0, –1 }.
ઉકેલ.અમે સમીકરણોની સિસ્ટમનો સામાન્ય ઉકેલ શોધી રહ્યા છીએ
a 1 x 1 + a 2 x 2 + a 3 x 3 = Θ
ગૌસ પદ્ધતિ. આ કરવા માટે, અમે આ સજાતીય સિસ્ટમને કોઓર્ડિનેટ્સમાં લખીએ છીએ:
સિસ્ટમ મેટ્રિક્સ
મંજૂર સિસ્ટમમાં ફોર્મ છે: ![]() (આર એ = 2, n= 3). સિસ્ટમ સહકારી અને અનિશ્ચિત છે. તેનો સામાન્ય ઉકેલ ( x 2 - મફત ચલ): x 3 = 13x 2 ; 3x 1 – 2x 2 – 13x 2 = 0 => x 1 = 5x 2 => એક્સઓ = . બિન-શૂન્ય વિશિષ્ટ ઉકેલની હાજરી, ઉદાહરણ તરીકે, સૂચવે છે કે વેક્ટર a
1 , a
2 , a
3
રેખીય રીતે નિર્ભર.
(આર એ = 2, n= 3). સિસ્ટમ સહકારી અને અનિશ્ચિત છે. તેનો સામાન્ય ઉકેલ ( x 2 - મફત ચલ): x 3 = 13x 2 ; 3x 1 – 2x 2 – 13x 2 = 0 => x 1 = 5x 2 => એક્સઓ = . બિન-શૂન્ય વિશિષ્ટ ઉકેલની હાજરી, ઉદાહરણ તરીકે, સૂચવે છે કે વેક્ટર a
1 , a
2 , a
3
રેખીય રીતે નિર્ભર.
ઉદાહરણ 2.
શોધો કે વેક્ટરની આપેલ સિસ્ટમ રેખીય રીતે આધારિત છે કે રેખીય રીતે સ્વતંત્ર છે:
1. a 1 = { -20, -15, - 4 }, a 2 = { –7, -2, -4 }, a 3 = { 3, –1, –2 }.
ઉકેલ.સમીકરણોની સજાતીય સિસ્ટમનો વિચાર કરો a 1 x 1 + a 2 x 2 + a 3 x 3 = Θ
અથવા વિસ્તૃત સ્વરૂપમાં (કોઓર્ડિનેટ્સ દ્વારા)

સિસ્ટમ સજાતીય છે. જો તે બિન-અધોગતિ છે, તો તેનો અનોખો ઉપાય છે. સજાતીય પ્રણાલીના કિસ્સામાં, શૂન્ય (તુચ્છ) ઉકેલ છે. આનો અર્થ એ છે કે આ કિસ્સામાં વેક્ટરની સિસ્ટમ સ્વતંત્ર છે. જો સિસ્ટમ ડિજનરેટ છે, તો તેમાં બિન-શૂન્ય ઉકેલો છે અને તેથી, તે નિર્ભર છે.
અમે અધોગતિ માટે સિસ્ટમ તપાસીએ છીએ:
 = –80 – 28 + 180 – 48 + 80 – 210 = – 106 ≠ 0.
= –80 – 28 + 180 – 48 + 80 – 210 = – 106 ≠ 0.
સિસ્ટમ બિન-ડિજનરેટ છે અને આમ, વેક્ટર છે a 1 , a 2 , a 3 રેખીય રીતે સ્વતંત્ર.
સોંપણીઓ.શોધો કે વેક્ટરની આપેલ સિસ્ટમ રેખીય રીતે આધારિત છે કે રેખીય રીતે સ્વતંત્ર છે:
1. a 1 = { -4, 2, 8 }, a 2 = { 14, -7, -28 }.
2. a 1 = { 2, -1, 3, 5 }, a 2 = { 6, -3, 3, 15 }.
3. a 1 = { -7, 5, 19 }, a 2 = { -5, 7 , -7 }, a 3 = { -8, 7, 14 }.
4. a 1 = { 1, 2, -2 }, a 2 = { 0, -1, 4 }, a 3 = { 2, -3, 3 }.
5. a 1 = { 1, 8 , -1 }, a 2 = { -2, 3, 3 }, a 3 = { 4, -11, 9 }.
6. a 1 = { 1, 2 , 3 }, a 2 = { 2, -1 , 1 }, a 3 = { 1, 3, 4 }.
7. a 1 = {0, 1, 1 , 0}, a 2 = {1, 1 , 3, 1}, a 3 = {1, 3, 5, 1}, a 4 = {0, 1, 1, -2}.
8. a 1 = {-1, 7, 1 , -2}, a 2 = {2, 3 , 2, 1}, a 3 = {4, 4, 4, -3}, a 4 = {1, 6, -11, 1}.
9. સાબિત કરો કે વેક્ટર્સની સિસ્ટમ રેખીય રીતે આધારિત હશે જો તેમાં શામેલ હોય તો:
a) બે સમાન વેક્ટર;
b) બે પ્રમાણસર વેક્ટર.
આ લેખમાં આપણે આવરી લઈશું:
- કોલિનિયર વેક્ટર શું છે;
- વેક્ટર્સની સમકક્ષતા માટેની શરતો શું છે;
- કોલિનિયર વેક્ટરના કયા ગુણધર્મો અસ્તિત્વમાં છે;
- કોલિનિયર વેક્ટર્સની રેખીય અવલંબન શું છે.
કોલિનિયર વેક્ટર એવા વેક્ટર છે જે એક લીટીના સમાંતર હોય છે અથવા એક લીટી પર આવેલા હોય છે.
ઉદાહરણ 1
વેક્ટરની સમકક્ષતા માટેની શરતો
જો નીચેની કોઈપણ સ્થિતિ સાચી હોય તો બે વેક્ટર સમરેખા હોય છે:
- શરત 1 . વેક્ટર a અને b સમરેખા હોય છે જો ત્યાં સંખ્યા λ હોય જેમ કે a = λ b;
- શરત 2 . વેક્ટર a અને b સમાન સંકલન ગુણોત્તર સાથે સમરેખા છે:
a = (a 1 ; a 2) , b = (b 1 ; b 2) ⇒ a ∥ b ⇔ a 1 b 1 = a 2 b 2
- શરત 3 . વેક્ટર a અને b સમરેખા હોય છે જો કે ક્રોસ પ્રોડક્ટ અને શૂન્ય વેક્ટર સમાન હોય:
a ∥ b ⇔ a, b = 0
નોંધ 1
શરત 2 જો વેક્ટર કોઓર્ડિનેટ્સમાંથી એક શૂન્ય હોય તો લાગુ પડતું નથી.
નોંધ 2
શરત 3 ફક્ત તે વેક્ટર્સને લાગુ પડે છે જે અવકાશમાં ઉલ્લેખિત છે.
વેક્ટર્સની સમન્વયતાનો અભ્યાસ કરવા માટે સમસ્યાઓના ઉદાહરણો
ઉદાહરણ 1અમે સમકક્ષતા માટે a = (1; 3) અને b = (2; 1) વેક્ટર્સનું પરીક્ષણ કરીએ છીએ.
કેવી રીતે ઉકેલવું?
આ કિસ્સામાં, 2 જી કોલિનરીટી શરતનો ઉપયોગ કરવો જરૂરી છે. આપેલ વેક્ટર માટે તે આના જેવો દેખાય છે:
સમાનતા ખોટી છે. આના પરથી આપણે નિષ્કર્ષ પર આવી શકીએ છીએ કે a અને b વેક્ટર બિન-કોલિનિયર છે.
જવાબ આપો : a | | b
ઉદાહરણ 2
a = (1; 2) અને b = (- 1; m) વેક્ટરના સમકક્ષ હોવા માટે m વેક્ટરનું કયું મૂલ્ય જરૂરી છે?
કેવી રીતે ઉકેલવું?
બીજી કોલિનિયરિટી શરતનો ઉપયોગ કરીને, જો તેમના કોઓર્ડિનેટ્સ પ્રમાણસર હોય તો વેક્ટર સમરેખીય હશે:
આ બતાવે છે કે m = - 2.
જવાબ: m = - 2 .
રેખીય અવલંબન અને વેક્ટર સિસ્ટમ્સની રેખીય સ્વતંત્રતા માટેના માપદંડ
પ્રમેયવેક્ટર સ્પેસમાં વેક્ટરની સિસ્ટમ રેખીય રીતે ત્યારે જ નિર્ભર છે જો સિસ્ટમના વેક્ટરમાંથી એકને આ સિસ્ટમના બાકીના વેક્ટરની દ્રષ્ટિએ વ્યક્ત કરી શકાય.
પુરાવો
ચાલો સિસ્ટમ e 1 , e 2 , . . . , e n રેખીય રીતે આધારિત છે. ચાલો શૂન્ય વેક્ટરની બરાબર આ સિસ્ટમનું રેખીય સંયોજન લખીએ:
a 1 e 1 + a 2 e 2 + . . . + a n e n = 0
જેમાં ઓછામાં ઓછા એક સંયોજન ગુણાંક શૂન્યની બરાબર નથી.
ચાલો a k ≠ 0 k ∈ 1 , 2 , . . . , એન.
અમે સમાનતાની બંને બાજુઓને બિન-શૂન્ય ગુણાંક દ્વારા વિભાજીત કરીએ છીએ:
a k - 1 (a k - 1 a 1) e 1 + (a k - 1 a k) e k + . . . + (a k - 1 a n) e n = 0
ચાલો સૂચિત કરીએ:
A k - 1 a m , જ્યાં m ∈ 1 , 2 , . . . , k - 1 , k + 1 , n
આ કિસ્સામાં:
β 1 e 1 + . . . + β k - 1 e k - 1 + β k + 1 e k + 1 + . . . + β n e n = 0
અથવા e k = (- β 1) e 1 + . . . + (- β k - 1) e k - 1 + (- β k + 1) e k + 1 + . . . + (- β n) e n
તે અનુસરે છે કે સિસ્ટમના વેક્ટરમાંથી એક સિસ્ટમના અન્ય તમામ વેક્ટર દ્વારા વ્યક્ત થાય છે. જે સાબિત કરવાની જરૂર છે (વગેરે).
પર્યાપ્તતા
સિસ્ટમના અન્ય તમામ વેક્ટર દ્વારા એક વેક્ટરને રેખીય રીતે વ્યક્ત કરવા દો:
e k = γ 1 e 1 + . . . + γ k - 1 e k - 1 + γ k + 1 e k + 1 + . . . + γ n e n
અમે વેક્ટર e k ને આ સમાનતાની જમણી બાજુએ ખસેડીએ છીએ:
0 = γ 1 e 1 + . . . + γ k - 1 e k - 1 - e k + γ k + 1 e k + 1 + . . . + γ n e n
વેક્ટર e k નો ગુણાંક - 1 ≠ 0 ની બરાબર હોવાથી, અમને e 1, e 2, વેક્ટરની સિસ્ટમ દ્વારા શૂન્યની બિન-તુચ્છ રજૂઆત મળે છે. . . , e n , અને આ, બદલામાં, મતલબ કે વેક્ટર્સની આ સિસ્ટમ રેખીય રીતે આધારિત છે. જે સાબિત કરવાની જરૂર છે (વગેરે).
પરિણામ:
- વેક્ટરની સિસ્ટમ રેખીય રીતે સ્વતંત્ર હોય છે જ્યારે તેના કોઈપણ વેક્ટરને સિસ્ટમના અન્ય તમામ વેક્ટર્સની દ્રષ્ટિએ વ્યક્ત કરી શકાતા નથી.
- શૂન્ય વેક્ટર અથવા બે સમાન વેક્ટર ધરાવતી વેક્ટર્સની સિસ્ટમ રેખીય રીતે આધારિત છે.
રેખીય રીતે આશ્રિત વેક્ટરના ગુણધર્મો
- 2- અને 3-પરિમાણીય વેક્ટર્સ માટે, નીચેની શરત પૂરી થાય છે: બે રેખીય રીતે આશ્રિત વેક્ટર સમરેખા હોય છે. બે કોલિનિયર વેક્ટર રેખીય રીતે આધારિત છે.
- 3-પરિમાણીય વેક્ટર્સ માટે, નીચેની સ્થિતિ પૂરી થાય છે: ત્રણ રેખીય રીતે આશ્રિત વેક્ટર કોપ્લાનર છે. (3 કોપ્લાનર વેક્ટર રેખીય રીતે આધારિત છે).
- n-પરિમાણીય વેક્ટર્સ માટે, નીચેની સ્થિતિ સંતુષ્ટ છે: n + 1 વેક્ટર હંમેશા રેખીય રીતે આધારિત હોય છે.
રેખીય અવલંબન અથવા વેક્ટર્સની રેખીય સ્વતંત્રતા સાથે સંકળાયેલી સમસ્યાઓ ઉકેલવાના ઉદાહરણો
ઉદાહરણ 3ચાલો રેખીય સ્વતંત્રતા માટે a = 3, 4, 5, b = - 3, 0, 5, c = 4, 4, 4, d = 3, 4, 0 ને તપાસીએ.
ઉકેલ. વેક્ટર્સ રેખીય રીતે આધારિત છે કારણ કે વેક્ટરનું પરિમાણ વેક્ટરની સંખ્યા કરતા ઓછું છે.
ઉદાહરણ 4
ચાલો રેખીય સ્વતંત્રતા માટે a = 1, 1, 1, b = 1, 2, 0, c = 0, - 1, 1 વેક્ટર્સને તપાસીએ.
ઉકેલ. અમે ગુણાંકના મૂલ્યો શોધીએ છીએ કે જેના પર રેખીય સંયોજન શૂન્ય વેક્ટર સમાન હશે:
x 1 a + x 2 b + x 3 c 1 = 0
અમે વેક્ટર સમીકરણને રેખીય સ્વરૂપમાં લખીએ છીએ:
x 1 + x 2 = 0 x 1 + 2 x 2 - x 3 = 0 x 1 + x 3 = 0
અમે ગૌસ પદ્ધતિનો ઉપયોગ કરીને આ સિસ્ટમને હલ કરીએ છીએ:
1 1 0 | 0 1 2 - 1 | 0 1 0 1 | 0 ~
2જી લાઇનમાંથી આપણે 1લી બાદ કરીએ છીએ, 3જી - 1લીમાંથી:
~ 1 1 0 | 0 1 - 1 2 - 1 - 1 - 0 | 0 - 0 1 - 1 0 - 1 1 - 0 | 0 - 0 ~ 1 1 0 | 0 0 1 - 1 | 0 0 - 1 1 | 0 ~
1લી લીટીમાંથી આપણે 2જી બાદ કરીએ છીએ, 3જીમાં આપણે 2જી ઉમેરીએ છીએ:
~ 1 - 0 1 - 1 0 - (- 1) | 0 - 0 0 1 - 1 | 0 0 + 0 - 1 + 1 1 + (- 1) | 0 + 0 ~ 0 1 0 | 1 0 1 - 1 | 0 0 0 0 | 0
ઉકેલ પરથી તે અનુસરે છે કે સિસ્ટમ પાસે ઘણા ઉકેલો છે. આનો અર્થ એ છે કે આવી સંખ્યાઓ x 1, x 2, x 3 ના મૂલ્યોનું બિન-શૂન્ય સંયોજન છે જેના માટે a, b, c નું રેખીય સંયોજન શૂન્ય વેક્ટરની બરાબર છે. તેથી, વેક્ટર a, b, c છે રેખીય રીતે નિર્ભર.
જો તમને ટેક્સ્ટમાં કોઈ ભૂલ દેખાય છે, તો કૃપા કરીને તેને હાઇલાઇટ કરો અને Ctrl+Enter દબાવો
અમારા દ્વારા પરિચય કરાવ્યો વેક્ટર પર રેખીય કામગીરીમાટે વિવિધ અભિવ્યક્તિઓ બનાવવાનું શક્ય બનાવે છે વેક્ટર જથ્થોઅને આ કામગીરી માટે સેટ કરેલ ગુણધર્મોનો ઉપયોગ કરીને તેમને રૂપાંતરિત કરો.
આપેલ વેક્ટર a 1, ..., a n ના સમૂહના આધારે, તમે ફોર્મની અભિવ્યક્તિ બનાવી શકો છો
જ્યાં 1, ..., અને n મનસ્વી વાસ્તવિક સંખ્યાઓ છે. આ અભિવ્યક્તિ કહેવાય છે વેક્ટર્સનું રેખીય સંયોજન a 1, ..., a n. સંખ્યાઓ α i, i = 1, n, રજૂ કરે છે રેખીય સંયોજન ગુણાંક. વેક્ટરનો સમૂહ પણ કહેવાય છે વેક્ટર સિસ્ટમ.
વેક્ટર્સના રેખીય સંયોજનની પરિચયિત વિભાવનાના સંબંધમાં, વેક્ટરના સમૂહનું વર્ણન કરવામાં સમસ્યા ઊભી થાય છે જે 1, ..., a n વેક્ટર્સની આપેલ સિસ્ટમના રેખીય સંયોજન તરીકે લખી શકાય છે. વધુમાં, રેખીય સંયોજનના સ્વરૂપમાં વેક્ટરનું પ્રતિનિધિત્વ હોય તેવી પરિસ્થિતિઓ વિશે અને આવા પ્રતિનિધિત્વની વિશિષ્ટતા વિશે કુદરતી પ્રશ્નો છે.
વ્યાખ્યા 2.1.વેક્ટર a 1, ..., અને n કહેવાય છે રેખીય રીતે નિર્ભર, જો ત્યાં α 1 , ... , α n નો સમૂહ હોય
α 1 a 1 + ... + α n а n = 0 (2.2)
અને આમાંનો ઓછામાં ઓછો એક ગુણાંક બિન-શૂન્ય છે. જો ગુણાંકનો ઉલ્લેખિત સમૂહ અસ્તિત્વમાં નથી, તો વેક્ટર કહેવામાં આવે છે રેખીય રીતે સ્વતંત્ર.
જો α 1 = ... = α n = 0, તો દેખીતી રીતે, α 1 a 1 + ... + α n a n = 0. આને ધ્યાનમાં રાખીને, આપણે આ કહી શકીએ: વેક્ટર a 1, ..., અને n એ રેખીય રીતે સ્વતંત્ર છે જો તે સમાનતા (2.2) થી અનુસરે છે કે બધા ગુણાંક α 1 , ... , α n શૂન્ય સમાન છે.
નીચેનો પ્રમેય સમજાવે છે કે શા માટે નવા ખ્યાલને "નિર્ભરતા" (અથવા "સ્વતંત્રતા") શબ્દ કહેવામાં આવે છે, અને રેખીય અવલંબન માટે એક સરળ માપદંડ પૂરો પાડે છે.
પ્રમેય 2.1. 1, ..., અને n, n > 1 વેક્ટર્સ રેખીય રીતે આધારિત હોવા માટે, તે જરૂરી અને પૂરતું છે કે તેમાંથી એક અન્યનું રેખીય સંયોજન છે.
◄ આવશ્યકતા. ચાલો ધારીએ કે વેક્ટર a 1, ..., અને n રેખીય રીતે આધારિત છે. રેખીય અવલંબનની વ્યાખ્યા 2.1 અનુસાર, સમાનતામાં (2.2) ડાબી બાજુએ ઓછામાં ઓછો એક બિન-શૂન્ય ગુણાંક છે, ઉદાહરણ તરીકે α 1. સમાનતાની ડાબી બાજુએ પ્રથમ પદ છોડીને, અમે બાકીનાને જમણી બાજુએ ખસેડીએ છીએ, તેમના ચિહ્નોને બદલીએ છીએ, હંમેશની જેમ. પરિણામી સમાનતાને α 1 વડે ભાગતા, આપણને મળે છે
a 1 =-α 2 /α 1 ⋅ a 2 - ... - α n /α 1 ⋅ a n
તે બાકીના વેક્ટર a 2, ..., a n ના રેખીય સંયોજન તરીકે વેક્ટર a 1 નું પ્રતિનિધિત્વ.
પર્યાપ્તતા. ચાલો, ઉદાહરણ તરીકે, પ્રથમ વેક્ટર a 1 ને બાકીના વેક્ટરના રેખીય સંયોજન તરીકે રજૂ કરી શકાય: a 1 = β 2 a 2 + ... + β n a n. બધી શરતોને જમણી બાજુથી ડાબી તરફ સ્થાનાંતરિત કરીને, અમે 1 - β 2 a 2 - ... - β n a n = 0 મેળવીએ છીએ, એટલે કે. α 1 = 1, α 2 = - β 2, ..., α n = - β n, સમાન ગુણાંક સાથે a 1, ..., a n વેક્ટર્સનું રેખીય સંયોજન શૂન્ય વેક્ટર.આ રેખીય સંયોજનમાં, બધા ગુણાંક શૂન્ય નથી. વ્યાખ્યા 2.1 અનુસાર, વેક્ટર a 1, ..., અને n રેખીય રીતે આધારિત છે.
રેખીય અવલંબન માટેની વ્યાખ્યા અને માપદંડ બે અથવા વધુ વેક્ટરની હાજરી સૂચવવા માટે ઘડવામાં આવે છે. જો કે, આપણે એક વેક્ટરની રેખીય અવલંબન વિશે પણ વાત કરી શકીએ છીએ. આ સંભાવનાને સમજવા માટે, "વેક્ટર રેખીય રીતે આધારિત છે" ને બદલે તમારે "વેક્ટર્સની સિસ્ટમ રેખીય રીતે આધારિત છે" કહેવાની જરૂર છે. તે જોવાનું સરળ છે કે "એક વેક્ટરની સિસ્ટમ રેખીય રીતે નિર્ભર છે" અભિવ્યક્તિનો અર્થ એ છે કે આ એક વેક્ટર શૂન્ય છે (રેખીય સંયોજનમાં ફક્ત એક જ ગુણાંક હોય છે, અને તે શૂન્યની બરાબર ન હોવો જોઈએ).
રેખીય અવલંબનની વિભાવનામાં સરળ ભૌમિતિક અર્થઘટન છે. નીચેના ત્રણ નિવેદનો આ અર્થઘટનને સ્પષ્ટ કરે છે.
પ્રમેય 2.2.બે વેક્ટર રેખીય રીતે નિર્ભર છે જો અને માત્ર જો તેઓ સમરેખા
◄ જો વેક્ટર a અને b રેખીય રીતે આધારિત હોય, તો તેમાંથી એક, ઉદાહરણ તરીકે a, બીજા દ્વારા વ્યક્ત થાય છે, એટલે કે. a = λb અમુક વાસ્તવિક સંખ્યા માટે λ. વ્યાખ્યા મુજબ 1.7 કામ કરે છેસંખ્યા દીઠ વેક્ટર્સ, વેક્ટર a અને b સમરેખા છે.
ચાલો હવે વેક્ટર a અને b ને સમરેખીય થવા દો. જો તે બંને શૂન્ય છે, તો તે સ્પષ્ટ છે કે તેઓ રેખીય રીતે આધારિત છે, કારણ કે તેમાંથી કોઈપણ રેખીય સંયોજન શૂન્ય વેક્ટર સમાન છે. આમાંના એક વેક્ટરને 0 ની બરાબર ન થવા દો, ઉદાહરણ તરીકે વેક્ટર b. ચાલો વેક્ટર લંબાઈના ગુણોત્તરને λ દ્વારા દર્શાવીએ: λ = |a|/|b|. કોલિનિયર વેક્ટર હોઈ શકે છે દિશાહીનઅથવા વિરુદ્ધ નિર્દેશિત. પછીના કિસ્સામાં, આપણે λ નું ચિહ્ન બદલીએ છીએ. પછી, વ્યાખ્યા 1.7 તપાસતા, અમને ખાતરી થાય છે કે a = λb. પ્રમેય 2.1 અનુસાર, વેક્ટર a અને b રેખીય રીતે આધારિત છે.
ટિપ્પણી 2.1.બે વેક્ટર્સના કિસ્સામાં, રેખીય અવલંબનના માપદંડને ધ્યાનમાં રાખીને, સાબિત પ્રમેયને નીચે પ્રમાણે સુધારી શકાય છે: બે વેક્ટર સમરેખા હોય છે અને માત્ર જો તેમાંથી એક સંખ્યા દ્વારા બીજાના ઉત્પાદન તરીકે દર્શાવવામાં આવે છે. આ બે વેક્ટરની સમકક્ષતા માટે અનુકૂળ માપદંડ છે.
પ્રમેય 2.3.ત્રણ વેક્ટર રેખીય રીતે નિર્ભર છે જો અને માત્ર જો તેઓ કોપ્લાનર.
◄ જો ત્રણ વેક્ટર a, b, c રેખીય રીતે આધારિત હોય, તો પછી, પ્રમેય 2.1 અનુસાર, તેમાંથી એક, ઉદાહરણ તરીકે a, અન્યનું રેખીય સંયોજન છે: a = βb + γc. ચાલો આપણે બિંદુ A પર b અને c વેક્ટરની ઉત્પત્તિને જોડીએ. પછી વેક્ટર βb, γс બિંદુ A અને તેની સાથે એક સામાન્ય મૂળ હશે. સમાંતરગ્રામના નિયમ મુજબ, તેમનો સરવાળો છેતે વેક્ટર a એ મૂળ A અને સાથે વેક્ટર હશે અંત, જે ઘટક વેક્ટર પર બનેલ સમાંતરગ્રામનું શિરોબિંદુ છે. આમ, બધા વેક્ટર એક જ સમતલમાં આવેલા છે, એટલે કે, કોપ્લાનર.
વેક્ટર a, b, c ને કોપ્લાનર થવા દો. જો આમાંથી એક વેક્ટર શૂન્ય હોય, તો તે સ્પષ્ટ છે કે તે અન્યનું રેખીય સંયોજન હશે. શૂન્ય સમાન રેખીય સંયોજનના તમામ ગુણાંક લેવા માટે તે પૂરતું છે. તેથી, આપણે ધારી શકીએ કે ત્રણેય વેક્ટર શૂન્ય નથી. સુસંગત શરૂ કર્યુંઆ વેક્ટર્સમાંથી એક સામાન્ય બિંદુ O પર. તેમના છેડાને અનુક્રમે બિંદુ A, B, C હોવા દો (ફિગ. 2.1). બિંદુ C દ્વારા આપણે O, A અને O, B બિંદુઓની જોડીમાંથી પસાર થતી રેખાઓની સમાંતર રેખાઓ દોરીએ છીએ. આંતરછેદના બિંદુઓને A" અને B તરીકે નિયુક્ત કરીએ છીએ", અમને સમાંતર OA"CB" મળે છે, તેથી, OC" = OA" + OB." વેક્ટર OA" અને બિન-શૂન્ય વેક્ટર a = OA સમરેખા છે, અને તેથી તેમાંથી પ્રથમ વાસ્તવિક સંખ્યા α:OA" = αOA દ્વારા બીજાને ગુણાકાર કરીને મેળવી શકાય છે. તેવી જ રીતે, OB" = βOB, β ∈ R. પરિણામે, આપણે તે OC" = α OA. + βOB મેળવીએ છીએ, એટલે કે વેક્ટર c એ વેક્ટર a અને bનું રેખીય સંયોજન છે. પ્રમેય 2.1 અનુસાર, વેક્ટર a, b, c રેખીય રીતે આધારિત છે.

પ્રમેય 2.4.કોઈપણ ચાર વેક્ટર રેખીય રીતે આધારિત છે.
◄ અમે પ્રમેય 2.3 ની સમાન યોજના અનુસાર સાબિતી આપીએ છીએ. મનસ્વી ચાર વેક્ટર a, b, c અને d ને ધ્યાનમાં લો. જો ચારમાંથી એક વેક્ટર શૂન્ય હોય, અથવા તેમાંથી બે સમસ્તર વેક્ટર હોય, અથવા ચારમાંથી ત્રણ વેક્ટર કોપ્લાનર હોય, તો આ ચાર વેક્ટર રેખીય રીતે આધારિત છે. ઉદાહરણ તરીકે, જો a અને b વેક્ટર્સ કોલિનિયર હોય, તો આપણે તેમના રેખીય સંયોજન αa + βb = 0 ને બિન-શૂન્ય ગુણાંક સાથે બનાવી શકીએ છીએ, અને પછી બાકીના બે વેક્ટરને આ સંયોજનમાં ઉમેરી શકીએ છીએ, શૂન્યને ગુણાંક તરીકે લઈએ છીએ. અમે 0 ની બરાબર ચાર વેક્ટરનું રેખીય સંયોજન મેળવીએ છીએ, જેમાં બિન-શૂન્ય ગુણાંક હોય છે.
આમ, આપણે ધારી શકીએ કે પસંદ કરેલા ચાર વેક્ટરમાંથી કોઈ વેક્ટર શૂન્ય નથી, કોઈ બે સમરેખા નથી અને કોઈ ત્રણ કોપ્લાનર નથી. ચાલો બિંદુ O ને તેમની સામાન્ય શરૂઆત તરીકે પસંદ કરીએ તો પછી a, b, c, d ના અંત કેટલાક બિંદુઓ A, B, C, D હશે (ફિગ. 2.2). બિંદુ D દ્વારા આપણે OBC, OCA, OAB વિમાનોની સમાંતર ત્રણ વિમાનો દોરીએ છીએ અને A", B, C" ને અનુક્રમે સીધી રેખાઓ OA, OB, OS સાથે આ વિમાનોના આંતરછેદના બિંદુઓ બનવા દો. આપણે a મેળવીએ છીએ. સમાંતર OA" C "B" C" B"DA", અને વેક્ટર a, b, c શિરોબિંદુ O માંથી નીકળતી તેની કિનારીઓ પર આવેલા છે. ચતુષ્કોણ OC"DC" સમાંતરગ્રામ હોવાથી, પછી OD = OC" + OC " બદલામાં, સેગમેન્ટ OC" એક કર્ણ છે OA"C"B", તેથી OC" = OA" + OB" અને OD = OA" + OB" + OC" .
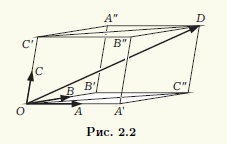
એ નોંધવું રહ્યું કે વેક્ટરની જોડી OA ≠ 0 અને OA" , OB ≠ 0 અને OB" , OC ≠ 0 અને OC" સમરેખા છે, અને તેથી, ગુણાંક α, β, γ પસંદ કરવાનું શક્ય છે જેથી કરીને OA" = αOA , OB" = βOB અને OC" = γOC. આપણને છેલ્લે OD = αOA + βOB + γOC મળે છે. પરિણામે, OD વેક્ટર અન્ય ત્રણ વેક્ટર દ્વારા વ્યક્ત થાય છે, અને પ્રમેય 2.1 અનુસાર તમામ ચાર વેક્ટર રેખીય રીતે આધારિત છે.
દો એલએક મનસ્વી રેખીય જગ્યા છે, a i Î એલ,- તેના તત્વો (વેક્ટર્સ).
વ્યાખ્યા 3.3.1.અભિવ્યક્તિ , ક્યાં , - મનસ્વી વાસ્તવિક સંખ્યાઓ, જેને રેખીય સંયોજન કહેવાય છે વેક્ટર a 1, a 2,…, a n.
જો વેક્ટર આર = , પછી તેઓ કહે છે કે આર વેક્ટરમાં વિઘટિત a 1, a 2,…, a n.
વ્યાખ્યા 3.3.2.વેક્ટર્સનું રેખીય સંયોજન કહેવામાં આવે છે બિન-તુચ્છ, જો સંખ્યાઓમાં ઓછામાં ઓછું એક બિન-શૂન્ય હોય. નહિંતર, રેખીય સંયોજન કહેવામાં આવે છે તુચ્છ.
વ્યાખ્યા 3.3.3 . વેક્ટર a 1 , a 2 ,…, a nરેખીય રીતે આશ્રિત કહેવામાં આવે છે જો ત્યાં તેમના જેવા બિન-તુચ્છ રેખીય સંયોજન અસ્તિત્વમાં હોય
= 0 .
વ્યાખ્યા 3.3.4. વેક્ટર a 1,a 2,…, a nજો સમાનતા હોય તો તેને રેખીય રીતે સ્વતંત્ર કહેવામાં આવે છે = 0 જ્યારે બધી સંખ્યાઓ હોય ત્યારે જ શક્ય છે l 1, l 2,…, એલ એનએક સાથે શૂન્ય સમાન છે.
નોંધ કરો કે કોઈપણ બિન-શૂન્ય તત્વ a 1 ને લીનિયરલી સ્વતંત્ર સિસ્ટમ તરીકે ગણી શકાય, કારણ કે સમાનતા l a 1 = 0 શક્ય હોય તો જ l= 0.
પ્રમેય 3.3.1.રેખીય અવલંબન માટે જરૂરી અને પર્યાપ્ત સ્થિતિ a 1 , a 2 ,…, a nઆમાંના ઓછામાં ઓછા એક તત્વોને બાકીના તત્વોમાં વિઘટિત કરવાની શક્યતા છે.
પુરાવો. આવશ્યકતા. તત્વોને a 1 , a 2 ,…, a nરેખીય રીતે નિર્ભર. આનો અર્થ એ છે કે = 0 , અને ઓછામાં ઓછી એક સંખ્યા l 1, l 2,…, એલ એનશૂન્યથી અલગ. નિશ્ચિતતા માટે દો l 1 ¹ 0. પછી
એટલે કે તત્વ a 1 એ તત્વો a 2 , a 3 , …, a માં વિઘટિત થાય છે n.
પર્યાપ્તતા. તત્વ a 1 ને તત્વો a 2 , a 3 , …, a માં વિઘટિત થવા દો n, એટલે કે a 1 = . પછી ![]() = 0
, તેથી, a 1 , a 2 ,…, a વેક્ટર્સનું બિન-તુચ્છ રેખીય સંયોજન છે n, સમાન 0
, તેથી તેઓ રેખીય રીતે આશ્રિત છે .
= 0
, તેથી, a 1 , a 2 ,…, a વેક્ટર્સનું બિન-તુચ્છ રેખીય સંયોજન છે n, સમાન 0
, તેથી તેઓ રેખીય રીતે આશ્રિત છે .
પ્રમેય 3.3.2. જો ઘટકોમાંથી ઓછામાં ઓછું એક 1 , a 2 ,…, a nશૂન્ય, તો આ વેક્ટર રેખીય રીતે નિર્ભર છે.
પુરાવો . દો a n= 0 , પછી = 0 , જેનો અર્થ થાય છે આ તત્વોની રેખીય અવલંબન.
પ્રમેય 3.3.3. જો n વેક્ટર્સ વચ્ચે કોઈ p (p< n) векторов линейно зависимы, то и все n элементов линейно зависимы.
પુરાવો. ચાલો, નિશ્ચિતતા માટે, તત્વો a 1 , a 2 ,…, a પીરેખીય રીતે નિર્ભર. આનો અર્થ એ છે કે એક બિન-તુચ્છ રેખીય સંયોજન છે જેમ કે = 0 . જો આપણે તેના બંને ભાગોમાં તત્વ ઉમેરીશું તો ઉલ્લેખિત સમાનતા સાચવવામાં આવશે. પછી + = 0 , અને ઓછામાં ઓછી એક સંખ્યા l 1, l 2,…, એલપીશૂન્યથી અલગ. તેથી, વેક્ટર a 1 , a 2 ,…, a nરેખીય રીતે નિર્ભર છે.
કોરોલરી 3.3.1.જો n તત્વો રેખીય રીતે સ્વતંત્ર છે, તો તેમાંથી કોઈપણ k રેખીય રીતે સ્વતંત્ર છે (k< n).
પ્રમેય 3.3.4. જો વેક્ટર્સ a 1 , a 2 ,…, a n- 1 રેખીય રીતે સ્વતંત્ર છે, અને તત્વો a 1 , a 2 ,…, a n- 1, એ n એ રેખીય રીતે નિર્ભર છે, પછી વેક્ટર a n ને વેક્ટરમાં વિસ્તૃત કરી શકાય છે a 1 , a 2 ,…, a n- 1 .
પુરાવો.શરત દ્વારા 1, એ 2 ,…, એ n- 1, એ n રેખીય રીતે આશ્રિત હોય છે, તો પછી તેમની વચ્ચે બિન-તુચ્છ રેખીય સંયોજન હોય છે = 0 , અને (અન્યથા, વેક્ટર a 1 , a 2 ,…, a રેખીય રીતે આશ્રિત બનશે n- 1). પરંતુ પછી વેક્ટર
 ,
,
Q.E.D.
કાર્ય 1.વેક્ટર્સ સિસ્ટમ રેખીય રીતે સ્વતંત્ર છે કે કેમ તે શોધો. વેક્ટર્સની સિસ્ટમ સિસ્ટમના મેટ્રિક્સ દ્વારા નિર્દિષ્ટ કરવામાં આવશે, જેના કૉલમમાં વેક્ટરના કોઓર્ડિનેટ્સનો સમાવેશ થાય છે.
 .
.
ઉકેલ.રેખીય સંયોજન દો  શૂન્ય બરાબર. આ સમાનતાને કોઓર્ડિનેટ્સમાં લખ્યા પછી, અમે સમીકરણોની નીચેની સિસ્ટમ મેળવીએ છીએ:
શૂન્ય બરાબર. આ સમાનતાને કોઓર્ડિનેટ્સમાં લખ્યા પછી, અમે સમીકરણોની નીચેની સિસ્ટમ મેળવીએ છીએ:
 .
.
સમીકરણોની આવી સિસ્ટમને ત્રિકોણાકાર કહેવામાં આવે છે. તેની પાસે એક જ ઉપાય છે  . તેથી, વેક્ટર્સ
. તેથી, વેક્ટર્સ  રેખીય રીતે સ્વતંત્ર.
રેખીય રીતે સ્વતંત્ર.
કાર્ય 2.વેક્ટર્સ સિસ્ટમ રેખીય રીતે સ્વતંત્ર છે કે કેમ તે શોધો.
 .
.
ઉકેલ.વેક્ટર્સ  રેખીય રીતે સ્વતંત્ર છે (સમસ્યા 1 જુઓ). ચાલો સાબિત કરીએ કે વેક્ટર એ વેક્ટરનું રેખીય સંયોજન છે
રેખીય રીતે સ્વતંત્ર છે (સમસ્યા 1 જુઓ). ચાલો સાબિત કરીએ કે વેક્ટર એ વેક્ટરનું રેખીય સંયોજન છે  . વેક્ટર વિસ્તરણ ગુણાંક
. વેક્ટર વિસ્તરણ ગુણાંક  સમીકરણોની સિસ્ટમમાંથી નક્કી કરવામાં આવે છે
સમીકરણોની સિસ્ટમમાંથી નક્કી કરવામાં આવે છે
 .
.
આ સિસ્ટમ, ત્રિકોણાકારની જેમ, એક અનન્ય ઉકેલ ધરાવે છે.
તેથી, વેક્ટર્સ સિસ્ટમ  રેખીય રીતે નિર્ભર.
રેખીય રીતે નિર્ભર.
ટિપ્પણી. સમસ્યા 1 માં સમાન પ્રકારના મેટ્રિસિસ કહેવામાં આવે છે ત્રિકોણાકાર , અને સમસ્યા 2 માં - સ્ટેપ્ડ ત્રિકોણાકાર . જો આ વેક્ટરોના કોઓર્ડિનેટ્સનું બનેલું મેટ્રિક્સ સ્ટેપ ત્રિકોણાકાર હોય તો વેક્ટરની સિસ્ટમની રેખીય અવલંબનનો પ્રશ્ન સરળતાથી ઉકેલી શકાય છે. જો મેટ્રિક્સ પાસે વિશિષ્ટ સ્વરૂપ નથી, તો પછી ઉપયોગ કરીને પ્રાથમિક શબ્દમાળા રૂપાંતરણો , સ્તંભો વચ્ચેના રેખીય સંબંધોને સાચવીને, તેને સ્ટેપ-ત્રિકોણાકાર સ્વરૂપમાં ઘટાડી શકાય છે.
પ્રાથમિક સ્ટ્રિંગ રૂપાંતરણમેટ્રિક્સ (EPS) મેટ્રિક્સ પર નીચેની કામગીરી કહેવામાં આવે છે:
1) રેખાઓનું પુન: ગોઠવણી;
2) બિન-શૂન્ય સંખ્યા દ્વારા શબ્દમાળાનો ગુણાકાર;
3) સ્ટ્રિંગમાં બીજી સ્ટ્રિંગ ઉમેરીને, મનસ્વી સંખ્યા દ્વારા ગુણાકાર.
કાર્ય 3.મહત્તમ રેખીય સ્વતંત્ર સબસિસ્ટમ શોધો અને વેક્ટર્સ સિસ્ટમના રેન્કની ગણતરી કરો
 .
.
ઉકેલ.ચાલો EPS નો ઉપયોગ કરીને સિસ્ટમના મેટ્રિક્સને સ્ટેપ-ત્રિકોણાકાર સ્વરૂપમાં ઘટાડીએ. પ્રક્રિયાને સમજાવવા માટે, અમે પ્રતીક દ્વારા રૂપાંતરિત કરવા માટેના મેટ્રિક્સની સંખ્યા સાથેની રેખા દર્શાવીએ છીએ. તીર પછીનો કૉલમ રૂપાંતરિત થઈ રહેલા મેટ્રિક્સની પંક્તિઓ પરની ક્રિયાઓ સૂચવે છે જે નવા મેટ્રિક્સની પંક્તિઓ મેળવવા માટે થવી જોઈએ.

 .
.
દેખીતી રીતે, પરિણામી મેટ્રિક્સના પ્રથમ બે કૉલમ રેખીય રીતે સ્વતંત્ર છે, ત્રીજો કૉલમ તેમનું રેખીય સંયોજન છે, અને ચોથો પ્રથમ બે પર આધાર રાખતો નથી. વેક્ટર્સ  મૂળભૂત કહેવાય છે. તેઓ સિસ્ટમની મહત્તમ રેખીય સ્વતંત્ર સબસિસ્ટમ બનાવે છે , અને સિસ્ટમનો ક્રમ ત્રણ છે.
મૂળભૂત કહેવાય છે. તેઓ સિસ્ટમની મહત્તમ રેખીય સ્વતંત્ર સબસિસ્ટમ બનાવે છે , અને સિસ્ટમનો ક્રમ ત્રણ છે.
આધાર, સંકલન
કાર્ય 4.આ આધારમાં વેક્ટર્સનો આધાર અને કોઓર્ડિનેટ્સ ભૌમિતિક વેક્ટરના સમૂહ પર શોધો જેના કોઓર્ડિનેટ્સ સ્થિતિને સંતોષે છે.  .
.
ઉકેલ. સમૂહ એ મૂળમાંથી પસાર થતું વિમાન છે. પ્લેન પર મનસ્વી ધોરણે બે નોન-કોલિનિયર વેક્ટરનો સમાવેશ થાય છે. પસંદ કરેલ આધારમાં વેક્ટર્સના કોઓર્ડિનેટ્સ રેખીય સમીકરણોની અનુરૂપ સિસ્ટમને હલ કરીને નક્કી કરવામાં આવે છે.
આ સમસ્યાને હલ કરવાની બીજી રીત છે, જ્યારે તમે કોઓર્ડિનેટ્સનો ઉપયોગ કરીને આધાર શોધી શકો છો.
કોઓર્ડિનેટ્સ  જગ્યાઓ પ્લેન પર કોઓર્ડિનેટ્સ નથી, કારણ કે તે સંબંધ દ્વારા સંબંધિત છે
જગ્યાઓ પ્લેન પર કોઓર્ડિનેટ્સ નથી, કારણ કે તે સંબંધ દ્વારા સંબંધિત છે  , એટલે કે, તેઓ સ્વતંત્ર નથી. સ્વતંત્ર ચલો અને (તેમને ફ્રી કહેવામાં આવે છે) પ્લેન પરના વેક્ટરને વિશિષ્ટ રીતે વ્યાખ્યાયિત કરે છે અને તેથી, તેમને કોઓર્ડિનેટ્સ તરીકે પસંદ કરી શકાય છે. પછી આધાર
, એટલે કે, તેઓ સ્વતંત્ર નથી. સ્વતંત્ર ચલો અને (તેમને ફ્રી કહેવામાં આવે છે) પ્લેન પરના વેક્ટરને વિશિષ્ટ રીતે વ્યાખ્યાયિત કરે છે અને તેથી, તેમને કોઓર્ડિનેટ્સ તરીકે પસંદ કરી શકાય છે. પછી આધાર  મુક્ત ચલોના સેટમાં પડેલા અને તેને અનુરૂપ વેક્ટરનો સમાવેશ થાય છે
મુક્ત ચલોના સેટમાં પડેલા અને તેને અનુરૂપ વેક્ટરનો સમાવેશ થાય છે  અને
અને  , એટલે કે .
, એટલે કે .
કાર્ય 5.અવકાશમાંના તમામ વેક્ટરના સમૂહ પર આ આધારમાં વેક્ટરનો આધાર અને કોઓર્ડિનેટ્સ શોધો કે જેમના વિષમ કોઓર્ડિનેટ્સ એકબીજા સાથે સમાન હોય.
ઉકેલ. ચાલો, અગાઉની સમસ્યાની જેમ, અવકાશમાં સંકલન પસંદ કરીએ.
કારણ કે  , પછી મફત ચલો
, પછી મફત ચલો  વિશિષ્ટ રીતે વેક્ટરને નિર્ધારિત કરે છે અને તેથી કોઓર્ડિનેટ્સ છે. અનુરૂપ આધારમાં વેક્ટર્સનો સમાવેશ થાય છે.
વિશિષ્ટ રીતે વેક્ટરને નિર્ધારિત કરે છે અને તેથી કોઓર્ડિનેટ્સ છે. અનુરૂપ આધારમાં વેક્ટર્સનો સમાવેશ થાય છે.
કાર્ય 6.ફોર્મના તમામ મેટ્રિસિસના સેટ પર આ આધારમાં વેક્ટરનો આધાર અને કોઓર્ડિનેટ્સ શોધો  , ક્યાં
, ક્યાં  - મનસ્વી સંખ્યાઓ.
- મનસ્વી સંખ્યાઓ.
ઉકેલ. માંથી દરેક મેટ્રિક્સ ફોર્મમાં વિશિષ્ટ રીતે રજૂ કરી શકાય છે:
આ સંબંધ એ આધારના સંદર્ભમાં વેક્ટરનું વિસ્તરણ છે  કોઓર્ડિનેટ્સ સાથે
કોઓર્ડિનેટ્સ સાથે  .
.
કાર્ય 7.વેક્ટરની સિસ્ટમના રેખીય હલનું પરિમાણ અને આધાર શોધો
 .
.
ઉકેલ. EPS નો ઉપયોગ કરીને, અમે મેટ્રિક્સને સિસ્ટમ વેક્ટર્સના કોઓર્ડિનેટ્સમાંથી સ્ટેપ-ત્રિકોણાકાર સ્વરૂપમાં રૂપાંતરિત કરીએ છીએ.


 .
.
કૉલમ  છેલ્લા મેટ્રિસિસ રેખીય રીતે સ્વતંત્ર છે, અને કૉલમ
છેલ્લા મેટ્રિસિસ રેખીય રીતે સ્વતંત્ર છે, અને કૉલમ  તેમના દ્વારા રેખીય રીતે વ્યક્ત થાય છે. તેથી, વેક્ટર્સ
તેમના દ્વારા રેખીય રીતે વ્યક્ત થાય છે. તેથી, વેક્ટર્સ  એક આધાર બનાવે છે
એક આધાર બનાવે છે  , અને
, અને  .
.
ટિપ્પણી. માં આધાર અસ્પષ્ટ રીતે પસંદ કરવામાં આવે છે. ઉદાહરણ તરીકે, વેક્ટર  પણ એક આધાર બનાવે છે
પણ એક આધાર બનાવે છે  .
.