Leçon de la série « Algorithmes géométriques »
Bonjour cher lecteur !
Aujourd'hui, nous allons commencer à apprendre des algorithmes liés à la géométrie. Le fait est qu'il existe de nombreux problèmes d'Olympiade en informatique liés à la géométrie computationnelle, et la résolution de ces problèmes pose souvent des difficultés.
Au cours de plusieurs leçons, nous examinerons un certain nombre de sous-tâches élémentaires sur lesquelles repose la solution de la plupart des problèmes de géométrie computationnelle.
Dans cette leçon, nous allons créer un programme pour trouver l'équation d'une droite, passant par donné deux points. Pour résoudre des problèmes géométriques, nous avons besoin de certaines connaissances en géométrie computationnelle. Nous consacrerons une partie de la leçon à faire leur connaissance.
Aperçus de la géométrie computationnelle
La géométrie computationnelle est une branche de l'informatique qui étudie les algorithmes permettant de résoudre des problèmes géométriques.
Les données initiales pour de tels problèmes peuvent être un ensemble de points sur un plan, un ensemble de segments, un polygone (spécifié, par exemple, par une liste de ses sommets dans le sens des aiguilles d'une montre), etc.
Le résultat peut être soit une réponse à une question (comme un point appartient-il à un segment, est-ce que deux segments se coupent, ...), soit un objet géométrique (par exemple, le plus petit polygone convexe reliant des points donnés, l'aire de un polygone, etc.) .
Nous considérerons les problèmes de géométrie computationnelle uniquement sur le plan et uniquement dans le système de coordonnées cartésiennes.
Vecteurs et coordonnées
Pour appliquer les méthodes de géométrie computationnelle, il est nécessaire de traduire les images géométriques dans le langage des nombres. Nous supposerons que le plan reçoit un système de coordonnées cartésiennes, dans lequel le sens de rotation dans le sens inverse des aiguilles d'une montre est dit positif.
Désormais, les objets géométriques reçoivent une expression analytique. Ainsi, pour préciser un point, il suffit d'indiquer ses coordonnées : une paire de nombres (x ; y). Un segment peut être spécifié en indiquant les coordonnées de ses extrémités ; une ligne droite peut être spécifiée en indiquant les coordonnées d'une paire de ses points.
Mais notre principal outil pour résoudre les problèmes seront les vecteurs. Permettez-moi donc de rappeler quelques informations à leur sujet.
Segment de ligne UN B, ce qui a un point UN est considéré comme le début (point d'application), et le point DANS– fin, appelée vecteur UN B et est désigné par l'un ou par une lettre minuscule en gras, par exemple UN .
Pour désigner la longueur d'un vecteur (c'est-à-dire la longueur du segment correspondant), nous utiliserons le symbole de module (par exemple, ).
Un vecteur arbitraire aura des coordonnées égales à la différence entre les coordonnées correspondantes de sa fin et de son début :
![]() ,
,
voici les points UN Et B
avoir des coordonnées ![]() respectivement.
respectivement.
Pour les calculs nous utiliserons le concept angle orienté, c'est-à-dire un angle qui prend en compte la position relative des vecteurs.
Angle orienté entre les vecteurs un Et b positif si la rotation vient du vecteur un vecteur b s'effectue dans le sens positif (dans le sens inverse des aiguilles d'une montre) et négatif dans l'autre cas. Voir Fig.1a, Fig.1b. On dit aussi qu’une paire de vecteurs un Et b orienté positivement (négativement).
Ainsi, la valeur de l'angle orienté dépend de l'ordre dans lequel les vecteurs sont répertoriés et peut prendre des valeurs dans l'intervalle .
De nombreux problèmes de géométrie computationnelle utilisent le concept de produits vectoriels (asymétriques ou pseudoscalaires) de vecteurs.
Le produit vectoriel des vecteurs a et b est le produit des longueurs de ces vecteurs et du sinus de l'angle qui les sépare :
![]() .
.
Produit croisé de vecteurs en coordonnées :
![]()
L'expression de droite est un déterminant du second ordre :

Contrairement à la définition donnée en géométrie analytique, c'est un scalaire.
Le signe du produit vectoriel détermine la position des vecteurs les uns par rapport aux autres :
un Et b orienté positivement.
Si la valeur est , alors une paire de vecteurs un Et b orienté négativement.
Le produit vectoriel des vecteurs non nuls est nul si et seulement s'ils sont colinéaires ( ![]() ). Cela signifie qu'ils se trouvent sur la même ligne ou sur des lignes parallèles.
). Cela signifie qu'ils se trouvent sur la même ligne ou sur des lignes parallèles.
Examinons quelques problèmes simples qui sont nécessaires pour résoudre des problèmes plus complexes.
Déterminons l'équation d'une droite à partir des coordonnées de deux points.
Équation d'une droite passant par deux points différents spécifiés par leurs coordonnées.
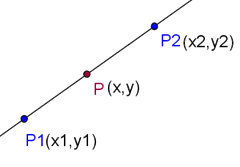
Soit deux points non coïncidants sur une droite : de coordonnées (x1 ; y1) et de coordonnées (x2 ; y2). En conséquence, un vecteur commençant en un point et se terminant en un point a des coordonnées (x2-x1, y2-y1). Si P(x, y) est un point arbitraire sur notre droite, alors les coordonnées du vecteur sont égales à (x-x1, y – y1).
En utilisant le produit vectoriel, la condition de colinéarité des vecteurs peut s'écrire comme suit :
Ceux. (x-x1)(y2-y1)-(y-y1)(x2-x1)=0
(y2-y1)x + (x1-x2)y + x1(y1-y2) + y1(x2-x1) = 0
On réécrit la dernière équation comme suit :
hache + par + c = 0, (1)
c = x1(y1-y2) + y1(x2-x1)
Ainsi, la droite peut être spécifiée par une équation de la forme (1).
Problème 1. Les coordonnées de deux points sont données. Trouvez sa représentation sous la forme ax + by + c = 0.
Dans cette leçon, nous avons appris quelques informations sur la géométrie computationnelle. Nous avons résolu le problème de trouver l’équation d’une droite à partir des coordonnées de deux points.
Dans la prochaine leçon, nous créerons un programme pour trouver le point d'intersection de deux droites données par nos équations.
Équation d'une droite passant par deux points. Dans l'article" " Je vous ai promis d'examiner la deuxième façon de résoudre les problèmes présentés pour trouver la dérivée, étant donné un graphique d'une fonction et une tangente à ce graphique. Nous discuterons de cette méthode dans , ne manquez pas! Pourquoi dans le prochain ?
Le fait est que la formule de l'équation d'une droite y sera utilisée. Bien entendu, nous pourrions simplement montrer cette formule et vous conseiller de l’apprendre. Mais il vaut mieux expliquer d’où il vient (comment il est dérivé). Il est nécessaire! Si vous l'oubliez, vous pouvez le restaurer rapidementne sera pas difficile. Tout est décrit ci-dessous en détail. Nous avons donc deux points A sur le plan de coordonnées(x 1;y 1) et B(x 2;y 2), une ligne droite est tracée passant par les points indiqués : 
Voici la formule directe elle-même :

*C'est-à-dire qu'en remplaçant des coordonnées spécifiques de points, nous obtenons une équation de la forme y=kx+b.
**Si vous « mémorisez » simplement cette formule, il y a une forte probabilité de se confondre avec les indices lorsque X. De plus, les indices peuvent être désignés de différentes manières, par exemple :
C'est pourquoi il est important d'en comprendre le sens.
Maintenant la dérivation de cette formule. Tout est très simple !

Les triangles ABE et ACF sont similaires en angle aigu (premier signe de similitude des triangles rectangles). Il en résulte que les rapports des éléments correspondants sont égaux, c'est-à-dire :
Maintenant, nous exprimons simplement ces segments par la différence des coordonnées des points :

Bien entendu, il n'y aura pas d'erreur si vous écrivez les relations des éléments dans un ordre différent (l'essentiel est de maintenir la cohérence) :

Le résultat sera la même équation de la droite. C'est tout!
Autrement dit, quelle que soit la façon dont les points eux-mêmes (et leurs coordonnées) sont désignés, en comprenant cette formule, vous trouverez toujours l'équation d'une ligne droite.
La formule peut être dérivée en utilisant les propriétés des vecteurs, mais le principe de dérivation sera le même, puisqu'il s'agira de la proportionnalité de leurs coordonnées. Dans ce cas, la même similitude des triangles rectangles fonctionne. À mon avis, la conclusion décrite ci-dessus est plus claire)).
Afficher la sortie via les coordonnées vectorielles >>>
Soit une ligne droite construite sur le plan de coordonnées passant par deux points donnés A(x 1;y 1) et B(x 2;y 2). Marquons un point arbitraire C sur la droite avec des coordonnées ( X; oui). On note également deux vecteurs :

On sait que pour les vecteurs situés sur des droites parallèles (ou sur la même droite), leurs coordonnées correspondantes sont proportionnelles, c'est-à-dire :
— on note l'égalité des rapports des coordonnées correspondantes :
Regardons un exemple :
Trouvez l'équation d'une droite passant par deux points de coordonnées (2;5) et (7:3).
Vous n’avez même pas besoin de construire la ligne droite elle-même. Nous appliquons la formule :
Il est important que vous saisissiez la correspondance lors de l'établissement du ratio. Vous ne pouvez pas vous tromper si vous écrivez :


Réponse : y=-2/5x+29/5 allez y=-0,4x+5,8
Afin de vous assurer que l'équation résultante est trouvée correctement, assurez-vous de vérifier - substituez-y les coordonnées des données dans l'état des points. Les équations devraient être correctes.
C'est tout. J'espère que le matériel vous a été utile.
Cordialement, Alexandre.
P.S : je vous serais reconnaissant de me parler du site sur les réseaux sociaux.
Cet article poursuit le thème de l'équation d'une droite sur un plan : nous considérerons ce type d'équation comme l'équation générale d'une droite. Définissons le théorème et donnons sa preuve ; Voyons ce qu'est une équation générale incomplète d'une droite et comment effectuer des transitions d'une équation générale vers d'autres types d'équations d'une droite. Nous renforcerons l'ensemble de la théorie avec des illustrations et des solutions à des problèmes pratiques.
Yandex.RTB R-A-339285-1
Supposons qu'un système de coordonnées rectangulaires O x y soit spécifié sur le plan.
Théorème 1
Toute équation du premier degré, de la forme A x + B y + C = 0, où A, B, C sont des nombres réels (A et B ne sont pas égaux à zéro en même temps), définit une droite dans un système de coordonnées rectangulaires sur un plan. À son tour, toute ligne droite dans un système de coordonnées rectangulaires sur un plan est déterminée par une équation qui a la forme A x + B y + C = 0 pour un certain ensemble de valeurs A, B, C.
Preuve
Ce théorème se compose de deux points ; nous allons démontrer chacun d'eux.
- Montrons que l'équation A x + B y + C = 0 définit une droite sur le plan.
Soit un point M 0 (x 0 , y 0), dont les coordonnées correspondent à l'équation A x + B y + C = 0. Ainsi : A x 0 + B y 0 + C = 0. Soustrayez des côtés gauche et droit des équations A x + B y + C = 0 les côtés gauche et droit de l'équation A x 0 + B y 0 + C = 0, nous obtenons une nouvelle équation qui ressemble à A (x - x 0) + B (y - y 0) = 0 . Cela équivaut à A x + B y + C = 0.
L'équation résultante A (x - x 0) + B (y - y 0) = 0 est une condition nécessaire et suffisante pour la circularité des vecteurs n → = (A, B) et M 0 M → = (x - x 0, oui - oui 0 ) . Ainsi, l'ensemble des points M (x, y) définit une droite dans un repère rectangulaire perpendiculaire à la direction du vecteur n → = (A, B). On peut supposer que ce n'est pas le cas, mais alors les vecteurs n → = (A, B) et M 0 M → = (x - x 0, y - y 0) ne seraient pas perpendiculaires, et l'égalité A (x - x 0 ) + B (y - y 0) = 0 ne serait pas vrai.
Par conséquent, l'équation A (x - x 0) + B (y - y 0) = 0 définit une certaine ligne dans un système de coordonnées rectangulaires sur le plan, et donc l'équation équivalente A x + B y + C = 0 définit le même ligne. C'est ainsi que nous avons démontré la première partie du théorème.
- Preuve que toute ligne droite dans un système de coordonnées rectangulaires sur un plan peut être spécifiée par une équation du premier degré A x + B y + C = 0.
Définissons une droite a dans un système de coordonnées rectangulaires sur un plan ; le point M 0 (x 0 , y 0) par lequel passe cette droite, ainsi que le vecteur normal de cette droite n → = (A, B) .
Soit aussi un point M (x, y) - une virgule flottante sur une ligne. Dans ce cas, les vecteurs n → = (A, B) et M 0 M → = (x - x 0, y - y 0) sont perpendiculaires entre eux, et leur produit scalaire est nul :
n → , M 0 M → = A (x - x 0) + B (y - y 0) = 0
Réécrivons l'équation A x + B y - A x 0 - B y 0 = 0, définissons C : C = - A x 0 - B y 0 et comme résultat final nous obtenons l'équation A x + B y + C = 0.
Ainsi, nous avons prouvé la deuxième partie du théorème, et nous avons prouvé le théorème dans son ensemble.
Définition 1
Une équation de la forme A x + B y + C = 0 - Ce équation générale d'une droite sur un plan dans un système de coordonnées rectangulairesOxy.
Sur la base du théorème éprouvé, nous pouvons conclure qu'une droite et son équation générale définie sur un plan dans un système de coordonnées rectangulaires fixes sont inextricablement liées. Autrement dit, la droite originale correspond à son équation générale ; l'équation générale d'une droite correspond à une droite donnée.
De la preuve du théorème, il résulte également que les coefficients A et B pour les variables x et y sont les coordonnées du vecteur normal de la droite, qui est donné par l'équation générale de la droite A x + B y + C = 0.
Considérons un exemple spécifique d'équation générale d'une droite.
Soit l'équation 2 x + 3 y - 2 = 0, qui correspond à une ligne droite dans un système de coordonnées rectangulaires donné. Le vecteur normal de cette droite est le vecteur n → = (2 , 3) . Traçons la ligne droite donnée dans le dessin.

On peut également affirmer ceci : la droite que l'on voit sur le dessin est déterminée par l'équation générale 2 x + 3 y - 2 = 0, puisque les coordonnées de tous les points d'une droite donnée correspondent à cette équation.
On peut obtenir l'équation λ · A x + λ · B y + λ · C = 0 en multipliant les deux côtés de l'équation générale de la droite par un nombre λ non égal à zéro. L'équation résultante est équivalente à l'équation générale originale, elle décrira donc la même ligne droite sur le plan.
Définition 2Équation générale complète d'une droite– une telle équation générale de la droite A x + B y + C = 0, dans laquelle les nombres A, B, C sont différents de zéro. Sinon l'équation est incomplet.
Analysons toutes les variations de l'équation générale incomplète d'une droite.
- Lorsque A = 0, B ≠ 0, C ≠ 0, l'équation générale prend la forme B y + C = 0. Une telle équation générale incomplète définit une ligne droite dans le système de coordonnées rectangulaires O x y qui est parallèle à l'axe O x, puisque pour toute valeur réelle de x la variable y prendra la valeur -CB. Autrement dit, l'équation générale de la droite A x + B y + C = 0, lorsque A = 0, B ≠ 0, précise le lieu des points (x, y), dont les coordonnées sont égales au même nombre -CB.
- Si A = 0, B ≠ 0, C = 0, l'équation générale prend la forme y = 0. Cette équation incomplète définit l'axe des x O x .
- Lorsque A ≠ 0, B = 0, C ≠ 0, on obtient une équation générale incomplète A x + C = 0, définissant une droite parallèle à l'ordonnée.
- Soit A ≠ 0, B = 0, C = 0, alors l'équation générale incomplète prendra la forme x = 0, et c'est l'équation de la droite de coordonnées O y.
- Enfin, pour A ≠ 0, B ≠ 0, C = 0, l'équation générale incomplète prend la forme A x + B y = 0. Et cette équation décrit une droite qui passe par l’origine. En fait, la paire de nombres (0, 0) correspond à l'égalité A x + B y = 0, puisque A · 0 + B · 0 = 0.
Illustrons graphiquement tous les types ci-dessus d'équation générale incomplète d'une droite.

Exemple 1
On sait que la droite donnée est parallèle à l'axe des ordonnées et passe par le point 2 7, - 11. Il est nécessaire d'écrire l'équation générale de la droite donnée.
Solution
Une droite parallèle à l'axe des ordonnées est donnée par une équation de la forme A x + C = 0, dans laquelle A ≠ 0. La condition précise également les coordonnées du point par lequel passe la ligne, et les coordonnées de ce point répondent aux conditions de l'équation générale incomplète A x + C = 0, c'est-à-dire l'égalité est vraie :
UNE 2 7 + C = 0
À partir de là, il est possible de déterminer C si nous donnons à A une valeur non nulle, par exemple A = 7. Dans ce cas, on obtient : 7 · 2 7 + C = 0 ⇔ C = - 2. Nous connaissons les deux coefficients A et C, les substituons dans l'équation A x + C = 0 et obtenons l'équation de droite requise : 7 x - 2 = 0
Répondre: 7 x - 2 = 0
Exemple 2
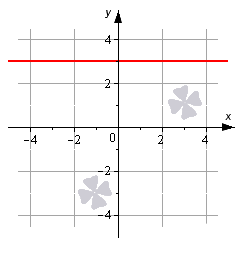
Le dessin montre une ligne droite ; vous devez écrire son équation.
Solution
Le dessin donné nous permet de prendre facilement les données initiales pour résoudre le problème. On voit sur le dessin que la droite donnée est parallèle à l'axe O x et passe par le point (0, 3).
La droite parallèle à l'abscisse est déterminée par l'équation générale incomplète B y + C = 0. Trouvons les valeurs de B et C. Les coordonnées du point (0, 3), puisque la droite donnée le traverse, satisferont l'équation de la droite B y + C = 0, alors l'égalité est valable : B · 3 + C = 0. Fixons B à une valeur autre que zéro. Disons B = 1, auquel cas à partir de l'égalité B · 3 + C = 0 on peut trouver C : C = - 3. En utilisant les valeurs connues de B et C, nous obtenons l'équation recherchée de la droite : y - 3 = 0.
Répondre: oui - 3 = 0 .
Équation générale d'une droite passant par un point donné dans un plan
Laissez la ligne donnée passer par le point M 0 (x 0 , y 0), alors ses coordonnées correspondent à l'équation générale de la ligne, c'est-à-dire l'égalité est vraie : A x 0 + B y 0 + C = 0. Soustrayons les côtés gauche et droit de cette équation des côtés gauche et droit de l'équation générale complète de la droite. On obtient : A (x - x 0) + B (y - y 0) + C = 0, cette équation est équivalente à l'équation générale originale, passe par le point M 0 (x 0, y 0) et a une normale vecteur n → = (A, B) .
Le résultat que nous avons obtenu permet d'écrire l'équation générale d'une droite avec les coordonnées connues du vecteur normal de la droite et les coordonnées d'un certain point de cette droite.
Exemple 3
Étant donné un point M 0 (- 3, 4) par lequel passe une droite, et le vecteur normal de cette droite n → = (1 , - 2) . Il est nécessaire d'écrire l'équation de la droite donnée.
Solution
Les conditions initiales permettent d'obtenir les données nécessaires pour compiler l'équation : A = 1, B = - 2, x 0 = - 3, y 0 = 4. Alors:
A (x - x 0) + B (y - y 0) = 0 ⇔ 1 (x - (- 3)) - 2 y (y - 4) = 0 ⇔ ⇔ x - 2 y + 22 = 0
Le problème aurait pu être résolu différemment. L'équation générale d'une droite est A x + B y + C = 0. Le vecteur normal donné permet d'obtenir les valeurs des coefficients A et B, alors :
A x + B y + C = 0 ⇔ 1 x - 2 y + C = 0 ⇔ x - 2 y + C = 0
Trouvons maintenant la valeur de C en utilisant le point M 0 (- 3, 4) spécifié par la condition du problème, par lequel passe la droite. Les coordonnées de ce point correspondent à l'équation x - 2 · y + C = 0, c'est-à-dire - 3 - 2 4 + C = 0. Donc C = 11. L'équation de droite requise prend la forme : x - 2 · y + 11 = 0.
Répondre: x - 2 oui + 11 = 0 .
Exemple 4
Étant donné une droite 2 3 x - y - 1 2 = 0 et un point M 0 situé sur cette droite. Seule l'abscisse de ce point est connue, et elle est égale à - 3. Il faut déterminer l'ordonnée d'un point donné.
Solution
Désignons les coordonnées du point M 0 par x 0 et y 0 . Les données sources indiquent que x 0 = - 3. Puisque le point appartient à une droite donnée, alors ses coordonnées correspondent à l'équation générale de cette droite. Alors l'égalité sera vraie :
2 3 x 0 - y 0 - 1 2 = 0
Définir y 0 : 2 3 · (- 3) - y 0 - 1 2 = 0 ⇔ - 5 2 - y 0 = 0 ⇔ y 0 = - 5 2
Répondre: - 5 2
Transition de l'équation générale d'une droite à d'autres types d'équations d'une droite et vice versa
Comme nous le savons, il existe plusieurs types d’équations pour une même droite sur un plan. Le choix du type d'équation dépend des conditions du problème ; il est possible de choisir celui qui convient le mieux pour le résoudre. La capacité de convertir une équation d’un type en une équation d’un autre type est ici très utile.
Considérons d'abord la transition de l'équation générale de la forme A x + B y + C = 0 à l'équation canonique x - x 1 a x = y - y 1 a y.
Si A ≠ 0, alors on déplace le terme B y vers la droite de l'équation générale. Sur le côté gauche, nous retirons A des parenthèses. En conséquence, nous obtenons : A x + C A = - B y.
Cette égalité peut s'écrire sous forme de proportion : x + C A - B = y A.
Si B ≠ 0, on laisse uniquement le terme A x du côté gauche de l'équation générale, on transfère les autres du côté droit, on obtient : A x = - B y - C. On sort – B des parenthèses, alors : A x = - B y + C B .
Réécrivons l'égalité sous forme de proportion : x - B = y + C B A.
Bien entendu, il n’est pas nécessaire de mémoriser les formules obtenues. Il suffit de connaître l'algorithme des actions pour passer d'une équation générale à une équation canonique.
Exemple 5
L'équation générale de la droite 3 y - 4 = 0 est donnée. Il faut la transformer en une équation canonique.
Solution
Écrivons l'équation originale sous la forme 3 y - 4 = 0. On procède ensuite selon l'algorithme : le terme 0 x reste à gauche ; et sur le côté droit on met - 3 entre parenthèses ; on obtient : 0 x = - 3 y - 4 3 .
Écrivons l'égalité résultante sous forme de proportion : x - 3 = y - 4 3 0 . Ainsi, nous avons obtenu une équation de forme canonique.
Réponse : x - 3 = y - 4 3 0.
Pour transformer l'équation générale d'une droite en équations paramétriques, on effectue d'abord une transition vers la forme canonique, puis une transition de l'équation canonique d'une droite aux équations paramétriques.
Exemple 6
La droite est donnée par l'équation 2 x - 5 y - 1 = 0. Notez les équations paramétriques de cette droite.
Solution
Faisons le passage de l'équation générale à l'équation canonique :
2 x - 5 ans - 1 = 0 ⇔ 2 x = 5 ans + 1 ⇔ 2 x = 5 ans + 1 5 ⇔ x 5 = y + 1 5 2
Maintenant, nous prenons les deux côtés de l'équation canonique résultante égaux à λ, alors :
x 5 = λ y + 1 5 2 = λ ⇔ x = 5 λ y = - 1 5 + 2 λ , λ ∈ R
Répondre:x = 5 λ y = - 1 5 + 2 λ , λ ∈ R
L'équation générale peut être convertie en une équation d'une droite de pente y = k · x + b, mais seulement lorsque B ≠ 0. Pour la transition, on laisse le terme B y à gauche, le reste est transféré à droite. On obtient : B y = - A x - C . Divisons les deux côtés de l'égalité résultante par B, différent de zéro : y = - A B x - C B.
Exemple 7
L'équation générale de la droite est donnée : 2 x + 7 y = 0. Vous devez convertir cette équation en équation de pente.
Solution
Effectuons les actions nécessaires selon l'algorithme :
2 x + 7 oui = 0 ⇔ 7 oui - 2 x ⇔ y = - 2 7 x
Répondre: y = - 2 7 x .
A partir de l'équation générale d'une droite, il suffit simplement d'obtenir une équation en segments de la forme x a + y b = 1. Pour effectuer une telle transition, nous déplaçons le nombre C vers la droite de l'égalité, divisons les deux côtés de l'égalité résultante par – C et, enfin, transférons les coefficients des variables x et y aux dénominateurs :
A x + B y + C = 0 ⇔ A x + B y = - C ⇔ ⇔ A - C x + B - C y = 1 ⇔ x - C A + y - C B = 1
Exemple 8
Il faut transformer l'équation générale de la droite x - 7 y + 1 2 = 0 en l'équation de la droite en segments.
Solution
Déplaçons 1 2 vers la droite : x - 7 y + 1 2 = 0 ⇔ x - 7 y = - 1 2 .
Divisons les deux côtés de l'égalité par -1/2 : x - 7 y = - 1 2 ⇔ 1 - 1 2 x - 7 - 1 2 y = 1 .
Répondre: x - 1 2 + y 1 14 = 1 .
En général, la transition inverse est également facile : d'autres types d'équations à l'équation générale.
L'équation d'une droite en segments et une équation avec un coefficient angulaire peuvent être facilement converties en une équation générale en rassemblant simplement tous les termes du côté gauche de l'égalité :
x a + y b ⇔ 1 a x + 1 by - 1 = 0 ⇔ A x + B y + C = 0 y = k x + b ⇔ y - k x - b = 0 ⇔ A x + B y + C = 0
L'équation canonique est convertie en une équation générale selon le schéma suivant :
x - x 1 a x = y - y 1 a y ⇔ a y · (x - x 1) = a x (y - y 1) ⇔ ⇔ a y x - a x y - a y x 1 + a x y 1 = 0 ⇔ A x + B y + C = 0
Pour passer des paramètres paramétriques, passez d'abord au canonique, puis au général :
x = x 1 + a x · λ y = y 1 + a y · λ ⇔ x - x 1 a x = y - y 1 a y ⇔ A x + B y + C = 0
Exemple 9
Les équations paramétriques de la droite x = - 1 + 2 · λ y = 4 sont données. Il faut écrire l’équation générale de cette droite.
Solution
Passons des équations paramétriques aux équations canoniques :
x = - 1 + 2 · λ y = 4 ⇔ x = - 1 + 2 · λ y = 4 + 0 · λ ⇔ λ = x + 1 2 λ = y - 4 0 ⇔ x + 1 2 = y - 4 0
Passons du canonique au général :
x + 1 2 = y - 4 0 ⇔ 0 · (x + 1) = 2 (y - 4) ⇔ y - 4 = 0
Répondre: oui - 4 = 0
Exemple 10
L'équation d'une droite dans les segments x 3 + y 1 2 = 1 est donnée. Il est nécessaire de passer à la forme générale de l'équation.
Solution:
On réécrit simplement l'équation sous la forme requise :
x 3 + y 1 2 = 1 ⇔ 1 3 x + 2 y - 1 = 0
Répondre: 1 3 x + 2 oui - 1 = 0 .
Établir une équation générale d'une droite
Nous avons dit plus haut que l'équation générale peut être écrite avec les coordonnées connues du vecteur normal et les coordonnées du point par lequel passe la droite. Une telle ligne droite est définie par l'équation A (x - x 0) + B (y - y 0) = 0. Nous y avons également analysé un exemple correspondant.
Examinons maintenant des exemples plus complexes dans lesquels nous devons d'abord déterminer les coordonnées du vecteur normal.
Exemple 11
Étant donné une droite parallèle à la droite 2 x - 3 y + 3 3 = 0. Le point M 0 (4, 1) par lequel passe la ligne donnée est également connu. Il est nécessaire d'écrire l'équation de la droite donnée.
Solution
Les conditions initiales nous disent que les droites sont parallèles, alors, comme vecteur normal de la droite dont il faut écrire l'équation, on prend le vecteur direction de la droite n → = (2, - 3) : 2 x - 3 ans + 3 3 = 0. Nous connaissons maintenant toutes les données nécessaires pour créer l’équation générale de la droite :
A (x - x 0) + B (y - y 0) = 0 ⇔ 2 (x - 4) - 3 (y - 1) = 0 ⇔ 2 x - 3 y - 5 = 0
Répondre: 2 x - 3 et - 5 = 0 .
Exemple 12
La droite donnée passe par l'origine perpendiculaire à la droite x - 2 3 = y + 4 5. Il est nécessaire de créer une équation générale pour une droite donnée.
Solution
Le vecteur normal d'une ligne donnée sera le vecteur directeur de la ligne x - 2 3 = y + 4 5.
Alors n → = (3, 5) . La droite passe par l'origine, c'est-à-dire passant par le point O (0, 0). Créons une équation générale pour une droite donnée :
A (x - x 0) + B (y - y 0) = 0 ⇔ 3 (x - 0) + 5 (y - 0) = 0 ⇔ 3 x + 5 y = 0
Répondre: 3 x + 5 oui = 0 .
Si vous remarquez une erreur dans le texte, veuillez la surligner et appuyer sur Ctrl+Entrée
Les équations canoniques d'une droite dans l'espace sont des équations qui définissent une droite passant par un point donné colinéaire au vecteur directeur.
Soit un point et un vecteur directeur. Un point arbitraire se trouve sur une droite je seulement si les vecteurs et sont colinéaires, c'est-à-dire que la condition est satisfaite pour eux :
![]() .
.
Les équations ci-dessus sont les équations canoniques de la droite.
Nombres m , n Et p sont des projections du vecteur directeur sur les axes de coordonnées. Puisque le vecteur est non nul, alors tous les nombres m , n Et p ne peut pas être simultanément égal à zéro. Mais un ou deux d’entre eux peuvent s’avérer nuls. En géométrie analytique, par exemple, l'entrée suivante est autorisée :
![]() ,
,
ce qui signifie que les projections du vecteur sur l'axe Oy Et Oz sont égaux à zéro. Par conséquent, le vecteur et la droite définis par les équations canoniques sont perpendiculaires aux axes Oy Et Oz, c'est-à-dire les avions yOz .
Exemple 1.Écrire les équations d'une ligne dans l'espace perpendiculaire à un plan ![]() et passant par le point d'intersection de ce plan avec l'axe Oz
.
et passant par le point d'intersection de ce plan avec l'axe Oz
.
Solution. Trouvons le point d'intersection de ce plan avec l'axe Oz. Puisque tout point situé sur l'axe Oz, a des coordonnées , alors, en supposant dans l'équation donnée du plan x = y = 0, nous obtenons 4 z- 8 = 0 ou z= 2 . Donc le point d'intersection de ce plan avec l'axe Oz a des coordonnées (0; 0; 2) . Puisque la droite recherchée est perpendiculaire au plan, elle est parallèle à son vecteur normal. Par conséquent, le vecteur directeur de la droite peut être le vecteur normal ![]() avion donné.
avion donné.
Écrivons maintenant les équations requises pour une droite passant par un point UN= (0 ; 0 ; 2) dans la direction du vecteur :
![]()
Équations d'une droite passant par deux points donnés
Une ligne droite peut être définie par deux points qui s'y trouvent ![]() Et
Et ![]() Dans ce cas, le vecteur directeur de la droite peut être le vecteur . Alors les équations canoniques de la droite prennent la forme
Dans ce cas, le vecteur directeur de la droite peut être le vecteur . Alors les équations canoniques de la droite prennent la forme
![]() .
.
Les équations ci-dessus déterminent une droite passant par deux points donnés.
Exemple 2.Écrivez l’équation d’une droite dans l’espace passant par les points et .
Solution. Écrivons les équations requises de la droite sous la forme donnée ci-dessus dans la référence théorique :
![]()
![]() .
.
Puisque , alors la droite souhaitée est perpendiculaire à l'axe Oy .
Droite comme la ligne d'intersection des plans
Une ligne droite dans l'espace peut être définie comme la ligne d'intersection de deux plans non parallèles et, c'est-à-dire comme un ensemble de points satisfaisant un système de deux équations linéaires.

Les équations du système sont également appelées équations générales d’une droite dans l’espace.
Exemple 3. Composer des équations canoniques d'une droite dans l'espace données par des équations générales
![]()
Solution. Pour écrire les équations canoniques d’une droite ou, ce qui revient au même, les équations d’une droite passant par deux points donnés, il faut trouver les coordonnées de deux points quelconques de la droite. Il peut s'agir des points d'intersection d'une ligne droite avec deux plans de coordonnées quelconques, par exemple yOz Et xOz .
Point d'intersection d'une droite et d'un plan yOz a une abscisse X= 0 . Par conséquent, en supposant dans ce système d’équations X= 0, on obtient un système à deux variables :
![]()
Sa décision oui = 2 , z= 6 avec X= 0 définit un point UN(0 ; 2 ; 6) la ligne souhaitée. Puis en supposant dans le système d'équations donné oui= 0, on obtient le système
Sa décision X = -2 , z= 0 avec oui= 0 définit un point B(-2; 0; 0) intersection d'une droite avec un plan xOz .
Écrivons maintenant les équations de la droite passant par les points UN(0 ; 2 ; 6) et B (-2; 0; 0) :
![]() ,
,
ou après avoir divisé les dénominateurs par -2 :
![]() ,
,
Dans cet article, nous considérerons l'équation générale d'une droite sur un plan. Donnons des exemples de construction d'une équation générale d'une droite si deux points de cette droite sont connus ou si un point et le vecteur normal de cette droite sont connus. Présentons des méthodes pour transformer une équation sous forme générale en formes canoniques et paramétriques.
Soit un système de coordonnées rectangulaires cartésiennes arbitraires Oxy. Considérons une équation du premier degré ou linéaire :
| Hache+Par+C=0, | (1) |
Où A, B, C− quelques constantes, et au moins un des éléments UN Et B différent de zéro.
Nous allons montrer qu'une équation linéaire sur un plan définit une droite. Démontrons le théorème suivant.
Théorème 1. Dans un système de coordonnées rectangulaires cartésiennes arbitraires sur un plan, chaque ligne droite peut être spécifiée par une équation linéaire. A l'inverse, chaque équation linéaire (1) dans un système de coordonnées rectangulaires cartésiennes arbitraires sur un plan définit une ligne droite.
Preuve. Il suffit de prouver que la droite L est déterminé par une équation linéaire pour n'importe quel système de coordonnées rectangulaires cartésiennes, puisqu'il sera alors déterminé par une équation linéaire pour tout choix de système de coordonnées rectangulaires cartésiennes.
Soit une ligne droite sur l'avion L. Choisissons un système de coordonnées pour que l'axe Bœuf coïncidait avec une ligne droite L, et l'axe Oy lui était perpendiculaire. Alors l'équation de la droite L prendra la forme suivante :
| y = 0. | (2) |
Tous les points sur une ligne L satisfera l’équation linéaire (2), et tous les points en dehors de cette ligne ne satisferont pas l’équation (2). La première partie du théorème a été prouvée.
Soit un système de coordonnées rectangulaires cartésiennes et soit une équation linéaire (1), où au moins un des éléments UN Et B différent de zéro. Trouvons le lieu géométrique des points dont les coordonnées satisfont à l'équation (1). Puisqu'au moins un des coefficients UN Et B est différent de zéro, alors l'équation (1) a au moins une solution M.(X 0 ,oui 0). (Par exemple, quand UN≠0, point M. 0 (−CALIFORNIE, 0) appartient au lieu géométrique des points donné). En substituant ces coordonnées dans (1) nous obtenons l'identité
| Hache 0 +Par 0 +C=0. | (3) |
Soustrayons l'identité (3) de (1) :
| UN(X−X 0)+B(oui−oui 0)=0. | (4) |
Évidemment, l'équation (4) est équivalente à l'équation (1). Il suffit donc de prouver que (4) définit une certaine droite.
Puisque nous considérons un système de coordonnées rectangulaires cartésiennes, il résulte de l'égalité (4) que le vecteur à composantes ( x−x 0 , o−o 0 ) orthogonal au vecteur n avec des coordonnées ( UN B}.
Considérons une ligne droite L, en passant par le point M. 0 (X 0 , oui 0) et perpendiculaire au vecteur n(Fig. 1). Laissons le point M.(X,y) appartient à la ligne L. Alors le vecteur de coordonnées x−x 0 , o−o 0 perpendiculaire n et l'équation (4) est satisfaite (produit scalaire des vecteurs n et égal à zéro). A l’inverse, si le point M.(X,y) ne se trouve pas sur une ligne L, puis le vecteur de coordonnées x−x 0 , o−o 0 n'est pas orthogonal au vecteur n et l'équation (4) n'est pas satisfaite. Le théorème a été prouvé.
Preuve. Puisque les lignes (5) et (6) définissent la même ligne, alors les vecteurs normaux n 1 ={UN 1 ,B 1) et n 2 ={UN 2 ,B 2) colinéaire. Puisque les vecteurs n 1 ≠0, n 2 ≠0, alors il existe un tel nombre λ , Quoi n 2 =n 1 λ . De là, nous avons : UN 2 =UN 1 λ , B 2 =B 1 λ . Prouvons que C 2 =C 1 λ . Évidemment, les lignes coïncidentes ont un point commun M. 0 (X 0 , oui 0). Multiplier l'équation (5) par λ et en en soustrayant l’équation (6), nous obtenons :
Puisque les deux premières égalités des expressions (7) sont satisfaites, alors C 1 λ −C 2 =0. Ceux. C 2 =C 1 λ . La remarque est avérée.
Notez que l'équation (4) définit l'équation de la droite passant par le point M. 0 (X 0 , oui 0) et ayant un vecteur normal n={UN B). Par conséquent, si le vecteur normal d'une droite et le point appartenant à cette droite sont connus, alors l'équation générale de la droite peut être construite à l'aide de l'équation (4).
Exemple 1. Une droite passe par un point M.=(4,−1) et a un vecteur normal n=(3, 5). Construire l’équation générale d’une droite.
Solution. Nous avons: X 0 =4, oui 0 =−1, UN=3, B=5. Pour construire l'équation générale d'une droite, on substitue ces valeurs dans l'équation (4) :
Répondre:
Le vecteur est parallèle à la droite L et donc perpendiculaire au vecteur normal de la droite L. Construisons un vecteur ligne normal L, en tenant compte du fait que le produit scalaire des vecteurs n et égal à zéro. On peut écrire par exemple n={1,−3}.
Pour construire l'équation générale d'une droite, nous utilisons la formule (4). Remplaçons les coordonnées du point dans (4) M. 1 (on peut aussi prendre les coordonnées du point M. 2) et vecteur normal n:
Remplacement des coordonnées des points M. 1 et M. 2 dans (9), nous pouvons nous assurer que la droite donnée par l'équation (9) passe par ces points.
Répondre:
Soustraire (10) de (1) :
Nous avons obtenu l'équation canonique de la droite. Vecteur q={−B, UN) est le vecteur directeur de la droite (12).
Voir conversion inversée.
Exemple 3. Une droite sur un plan est représentée par l'équation générale suivante :
Déplaçons le deuxième terme vers la droite et divisons les deux côtés de l'équation par 2,5.







