અંતર નક્કી કરી રહ્યા છીએ
બિંદુથી બિંદુ અને બિંદુથી રેખા સુધીનું અંતર
બિંદુથી બિંદુ સુધીનું અંતરઆ બિંદુઓને જોડતી સીધી રેખાની લંબાઈ દ્વારા નક્કી કરવામાં આવે છે. ઉપર બતાવ્યા પ્રમાણે, આ સમસ્યા કાં તો જમણી ત્રિકોણ પદ્ધતિ દ્વારા અથવા પ્રક્ષેપણ વિમાનોને બદલીને, સેગમેન્ટને લેવલ લાઇનની સ્થિતિ પર ખસેડીને ઉકેલી શકાય છે.
બિંદુથી રેખા સુધીનું અંતરએક બિંદુથી રેખા તરફ દોરેલા લંબ સેગમેન્ટ દ્વારા માપવામાં આવે છે. આ કાટખૂણેનો એક ભાગ પ્રોજેક્શન પ્લેન પર પૂર્ણ કદમાં દર્શાવવામાં આવે છે જો તે પ્રોજેક્ટિંગ સીધી રેખા તરફ દોરવામાં આવે છે. આમ, પ્રથમ સીધી રેખાને પ્રોજેક્ટિંગ સ્થિતિમાં સ્થાનાંતરિત કરવી આવશ્યક છે, અને પછીથી આપેલ બિંદુતેના પર લંબ નીચે કરો. ફિગ માં. 1 આ સમસ્યાનો ઉકેલ બતાવે છે. સામાન્ય સ્થિતિ રેખા AB ને સ્તર રેખા સ્થિતિમાં સ્થાનાંતરિત કરવા માટે, x14 IIA1 B1 હાથ ધરવામાં આવે છે. પછી વધારાના પ્રોજેક્શન પ્લેન P5 રજૂ કરીને AB ને પ્રોજેક્ટિંગ સ્થિતિમાં સ્થાનાંતરિત કરવામાં આવે છે, જેના માટે એક નવો પ્રોજેક્શન અક્ષ x45\A4 B4 દોરવામાં આવે છે.
ચિત્ર 1
પોઈન્ટ A અને Bની જેમ જ, પોઈન્ટ M પ્રોજેક્શન પ્લેન P5 પર પ્રક્ષેપિત છે.
પ્રક્ષેપણ પ્લેન P5 પર બિંદુ M થી રેખા AB સુધીના કાટખૂણે બેઝ K નું પ્રોજેક્શન K5 પોઈન્ટના અનુરૂપ અંદાજો સાથે મેળ ખાશે

A અને B. લંબ MK નું પ્રોજેક્શન M5 K5 એ બિંદુ M થી સીધી રેખા AB સુધીના અંતરનું કુદરતી મૂલ્ય છે.
પ્રોજેક્શન પ્લેન P4/P5 ની સિસ્ટમમાં, MK ની લંબ રેખા હશે, કારણ કે તે પ્રક્ષેપણ પ્લેન P5 ની સમાંતર પ્લેનમાં આવેલું છે. તેથી, પ્લેન P4 પર તેનું પ્રક્ષેપણ M4 K4 x45 ની સમાંતર છે, એટલે કે. પ્રક્ષેપણ A4 B4 ને લંબરૂપ. આ શરતો કાટખૂણે K ના પાયાના પ્રક્ષેપણ K4 ની સ્થિતિ નક્કી કરે છે, જે M4 સમાંતરથી x45 સુધી પ્રક્ષેપણ A4 B4 સાથે છેદે ત્યાં સુધી સીધી રેખા દોરવાથી જોવા મળે છે. કાટખૂણેના બાકીના અંદાજો P1 અને P2 ના પ્રક્ષેપણ વિમાનો પર બિંદુ K ને પ્રક્ષેપિત કરીને જોવા મળે છે.
બિંદુથી પ્લેન સુધીનું અંતર
આ સમસ્યાનો ઉકેલ ફિગમાં બતાવવામાં આવ્યો છે. 2. બિંદુ M થી પ્લેન (ABC) સુધીનું અંતર બિંદુથી પ્લેન સુધીના કાટખૂણે પડેલા ભાગ દ્વારા માપવામાં આવે છે.
આકૃતિ 2
પ્રોજેક્ટિંગ પ્લેનનો લંબ એ એક સ્તર રેખા હોવાથી, અમે આ સ્થાન પર જઈએ છીએ આપેલ વિમાન, જેના પરિણામે નવા રજૂ કરાયેલા પ્રોજેક્શન પ્લેન P4 પર આપણે ABC પ્લેનનું ડીજનરેટ પ્રોજેક્શન C4 B4 મેળવીએ છીએ. આગળ, અમે બિંદુ M ને P4 પર પ્રક્ષેપિત કરીએ છીએ

[MK]=[M4 K4]. કાટખૂણેના બાકીના અંદાજો એ જ રીતે બાંધવામાં આવે છે જેમ કે અગાઉનું કાર્ય, એટલે કે એ હકીકતને ધ્યાનમાં લેતા કે પ્રોજેક્શન પ્લેન P1/P4 ની સિસ્ટમમાં MK સેગમેન્ટ એ લેવલ લાઇન છે અને તેનું પ્રક્ષેપણ M1 K1 ધરીની સમાંતર છે
x14.
બે લીટીઓ વચ્ચેનું અંતર
છેદતી સીધી રેખાઓ વચ્ચેનું સૌથી ટૂંકું અંતર આ સીધી રેખાઓ દ્વારા કાપવામાં આવેલા સામાન્ય કાટખૂણાના સેગમેન્ટના કદ દ્વારા માપવામાં આવે છે. છેદતી રેખાઓમાંથી એકને લંબરૂપ પ્રક્ષેપણ પ્લેન (બે અનુગામી અવેજીના પરિણામે) પસંદ કરીને સમસ્યા હલ થાય છે. આ કિસ્સામાં, જરૂરી કાટખૂણે સેગમેન્ટ પસંદ કરેલ પ્રોજેક્શન પ્લેનની સમાંતર હશે અને તેના પર વિકૃતિ વિના ચિત્રિત કરવામાં આવશે. ફિગ માં. આકૃતિ 3 AB અને CD વિભાગો દ્વારા વ્યાખ્યાયિત બે છેદતી રેખાઓ દર્શાવે છે.
આકૃતિ 3
રેખાઓ શરૂઆતમાં પ્રોજેક્શન પ્લેન P4 પર પ્રક્ષેપિત કરવામાં આવે છે, તેમાંથી એક (કોઈપણ) ની સમાંતર, ઉદાહરણ તરીકે AB, અને P1 પર લંબ છે.
પ્રોજેક્શન પ્લેન P4 પર, સેગમેન્ટ AB ને વિકૃતિ વિના દર્શાવવામાં આવશે. પછી સેગમેન્ટ્સ પર પ્રોજેક્ટ કરવામાં આવે છે નવું વિમાન P5 સમાન સીધી રેખા AB અને પ્લેન P4 પર લંબરૂપ છે. પ્રક્ષેપણ પ્લેન P5 પર, તેની પર લંબરૂપ સેગમેન્ટ AB નું પ્રક્ષેપણ A5 = B5 બિંદુમાં અધોગતિ પામે છે અને NM સેગમેન્ટનું ઇચ્છિત મૂલ્ય N5 M5 એ C5 D5 પર લંબરૂપ છે અને તેને પૂર્ણ કદમાં દર્શાવવામાં આવ્યું છે. યોગ્ય સંચાર રેખાઓનો ઉપયોગ કરીને, સેગમેન્ટ MN ના અંદાજો મૂળ પર બાંધવામાં આવે છે

ચિત્ર. અગાઉ બતાવ્યા પ્રમાણે, પ્લેન P4 પર ઇચ્છિત સેગમેન્ટનું પ્રોજેક્શન N4 M4 એ પ્રોજેક્શન એક્સિસ x45 ની સમાંતર છે, કારણ કે તે પ્રોજેક્શન પ્લેન P4 / P5 ની સિસ્ટમમાં લેવલ લાઇન છે.
બે સમાંતર રેખાઓ AB થી CD વચ્ચેનું અંતર D નક્કી કરવાનું કાર્ય - ખાસ કેસઅગાઉનું એક (ફિગ. 4).
આકૃતિ 4
પ્રક્ષેપણ વિમાનોને બે વાર બદલીને, સમાંતર સીધી રેખાઓ પ્રોજેક્ટિંગ સ્થિતિમાં સ્થાનાંતરિત થાય છે, જેના પરિણામે પ્રક્ષેપણ પ્લેન P5 પર આપણી પાસે AB અને CDની સીધી રેખાઓના બે અધોગતિવાળા અંદાજો A5 = B5 અને C5 = D5 હશે. તેમની વચ્ચેનું અંતર D તેના કુદરતી મૂલ્ય જેટલું હશે.
એક સીધી રેખાથી તેની સમાંતર સમતલ સુધીનું અંતર સીધી રેખાના કોઈપણ બિંદુથી સમતલ પર દોરેલા લંબ વિભાગ દ્વારા માપવામાં આવે છે. તેથી, તે સામાન્ય સ્થિતિના પ્લેનને પ્રોજેક્ટિંગ પ્લેનની સ્થિતિમાં રૂપાંતરિત કરવા માટે પૂરતું છે, એક સીધો બિંદુ લો અને સમસ્યાનું સમાધાન બિંદુથી પ્લેન સુધીનું અંતર નક્કી કરવા માટે ઘટાડવામાં આવશે.
સમાંતર વિમાનો વચ્ચેનું અંતર નક્કી કરવા માટે, તેમને પ્રક્ષેપણ સ્થાન પર સ્થાનાંતરિત કરવું અને વિમાનોના અધોગતિવાળા અંદાજો માટે લંબ બાંધવું જરૂરી છે, જેમાંથી તેમની વચ્ચેનો ભાગ ઇચ્છિત અંતર મૂલ્ય હશે.
સેન્ટ પીટર્સબર્ગ સ્ટેટ મરીન ટેકનિકલ યુનિવર્સિટી
વિભાગ કમ્પ્યુટર ગ્રાફિક્સઅને માહિતી આધાર
પાઠ 3
વ્યવહારિક કાર્ય નંબર 3
એક બિંદુથી સીધી રેખા સુધીનું અંતર નક્કી કરવું.
તમે નીચેની રચનાઓ કરીને બિંદુ અને સીધી રેખા વચ્ચેનું અંતર નક્કી કરી શકો છો (ફિગ. 1 જુઓ):
· બિંદુ પરથી સાથેકાટખૂણેને સીધી રેખામાં નીચે કરો એ;
· બિંદુને ચિહ્નિત કરો પ્રતિસીધી રેખા સાથે કાટખૂણેનું આંતરછેદ;
સેગમેન્ટની લંબાઈ માપો કે.એસ, જેની શરૂઆત આપેલ બિંદુ છે, અને જેનો અંત ચિહ્નિત આંતરછેદ બિંદુ છે.
ફિગ.1. એક બિંદુથી એક રેખા સુધીનું અંતર.
આ પ્રકારની સમસ્યાઓ ઉકેલવા માટેનો આધાર પ્રક્ષેપણ નિયમ છે જમણો ખૂણો: જો તેની ઓછામાં ઓછી એક બાજુ પ્રક્ષેપણ સમતલની સમાંતર હોય તો જમણો ખૂણો વિકૃતિ વિના પ્રક્ષેપિત થાય છે(એટલે કે ખાનગી હોદ્દો ધરાવે છે). ચાલો ફક્ત આવા કેસથી પ્રારંભ કરીએ અને બિંદુથી અંતર નક્કી કરવા માટેના બાંધકામોને ધ્યાનમાં લઈએ સાથેએક સીધી રેખા સેગમેન્ટમાં એબી.
આ કાર્યમાં કોઈ પરીક્ષણ કેસ નથી, પરંતુ અમલ માટેના વિકલ્પો છે વ્યક્તિગત કાર્યોમાં દર્શાવેલ છે કોષ્ટક 1 અને કોષ્ટક 2. સમસ્યાનો ઉકેલ નીચે વર્ણવેલ છે, અને અનુરૂપ બાંધકામો ફિગ. 2 માં દર્શાવવામાં આવ્યા છે.
1. બિંદુથી ચોક્કસ રેખા સુધીનું અંતર નક્કી કરવું.
પ્રથમ, બિંદુ અને સેગમેન્ટના અંદાજો બાંધવામાં આવે છે. પ્રોજેક્શન A1B1ધરીની સમાંતર એક્સ. આનો અર્થ એ છે કે સેગમેન્ટ એબીપ્લેનની સમાંતર P2. જો બિંદુ પરથી સાથેમાટે લંબ દોરો એબી, પછી જમણો ખૂણો પ્લેન પર વિકૃતિ વિના પ્રક્ષેપિત થાય છે P2. આ તમને બિંદુ પરથી કાટખૂણે દોરવા દે છે C2પ્રક્ષેપણ માટે A2B2.
ડ્રોપ ડાઉન મેનુ ડ્રોઇંગ-સેગમેન્ટ (દોરો- રેખા) . બિંદુ પર કર્સર મૂકો C2અને તેને સેગમેન્ટના પ્રથમ બિંદુ તરીકે ઠીક કરો. કર્સરને સામાન્યની દિશામાં સેગમેન્ટમાં ખસેડો A2B2અને સંકેત દેખાય તે ક્ષણે તેના પર બીજા બિંદુને ઠીક કરો સામાન્ય (લંબરૂપ) . બાંધેલા બિંદુને ચિહ્નિત કરો K2. મોડને સક્ષમ કરો ઓર્થો(ઓર્થો) , અને બિંદુ પરથી K2જ્યાં સુધી તે પ્રક્ષેપણ સાથે છેદે નહીં ત્યાં સુધી ઊભી જોડાણ રેખા દોરો A1 B1. દ્વારા આંતરછેદ બિંદુને નિયુક્ત કરો K1. ડોટ પ્રતિ, સેગમેન્ટ પર પડેલો એબી, બિંદુ પરથી દોરેલા લંબનો આંતરછેદ બિંદુ છે સાથે, સેગમેન્ટ સાથે એબી. આમ, સેગમેન્ટ કે.એસબિંદુથી રેખા સુધી જરૂરી અંતર છે.
બાંધકામો પરથી તે સ્પષ્ટ છે કે સેગમેન્ટ કે.એસલે છે સામાન્ય સ્થિતિઅને તેથી તેના અંદાજો વિકૃત છે. અંતર વિશે વાત કરતી વખતે, અમારો અર્થ હંમેશા થાય છે સેગમેન્ટનું સાચું મૂલ્ય, અંતર વ્યક્ત કરે છે. તેથી, આપણે સેગમેન્ટની સાચી કિંમત શોધવાની જરૂર છે કેએસ,તેને ચોક્કસ સ્થિતિમાં ફેરવીને, ઉદાહરણ તરીકે, કે.એસ|| P1. બાંધકામોનું પરિણામ ફિગ 2 માં બતાવવામાં આવ્યું છે.
ફિગ. 2 માં દર્શાવેલ બાંધકામોમાંથી, આપણે નિષ્કર્ષ પર આવી શકીએ છીએ: રેખાની ચોક્કસ સ્થિતિ (સેગમેન્ટ સમાંતર છે P1અથવા P2) તમને એક બિંદુથી એક રેખા સુધીના અંતરના અંદાજો ઝડપથી બનાવવાની મંજૂરી આપે છે, પરંતુ તે વિકૃત છે.

ફિગ.2. બિંદુથી ચોક્કસ રેખા સુધીનું અંતર નક્કી કરવું.
2. એક બિંદુથી સામાન્ય રેખા સુધીનું અંતર નક્કી કરવું.
હંમેશા અંદર નથી પ્રારંભિક સ્થિતિસેગમેન્ટ ચોક્કસ સ્થાન ધરાવે છે. સામાન્ય રીતે પ્રારંભિક સ્થિતિએક બિંદુથી રેખા સુધીનું અંતર નક્કી કરવા માટે નીચેના બાંધકામો કરવામાં આવે છે:
a) ડ્રોઇંગ ટ્રાન્સફોર્મેશન પદ્ધતિનો ઉપયોગ કરીને, સેગમેન્ટને સામાન્ય સ્થિતિમાંથી ચોક્કસ સ્થિતિમાં રૂપાંતરિત કરો - આનાથી અંતર અંદાજો (વિકૃત) બનાવવાની મંજૂરી મળશે;
b) ફરીથી પદ્ધતિનો ઉપયોગ કરીને, જરૂરી અંતરને અનુરૂપ સેગમેન્ટને ચોક્કસ સ્થિતિમાં રૂપાંતરિત કરો - અમે વાસ્તવિક એકની સમાન તીવ્રતામાં અંતરનું પ્રક્ષેપણ મેળવીએ છીએ.
બિંદુથી અંતર નક્કી કરવા માટે બાંધકામના ક્રમને ધ્યાનમાં લો એસામાન્ય સ્થિતિમાં સેગમેન્ટમાં સૂર્ય(ફિગ. 3).
પ્રથમ સ્પિન પર સેગમેન્ટની ચોક્કસ સ્થિતિ પ્રાપ્ત કરવી જરૂરી છે INસી. સ્તરમાં આ કરવા માટે ટીએમઆરબિંદુઓને જોડવાની જરૂર છે એટી 2, C2અને A2. આદેશનો ઉપયોગ કરીને બદલો-ફેરવો (ફેરફાર કરો – ફેરવો) ત્રિકોણ В2С2А2બિંદુની આસપાસ ફેરવો C2સ્થિતિ જ્યાં નવા પ્રક્ષેપણ B2*C2સખત રીતે આડા સ્થિત હશે (બિંદુ સાથેગતિહીન છે અને તેથી, તેનું નવું પ્રક્ષેપણ મૂળ એક અને હોદ્દો સાથે એકરુપ છે C2*અને C1*ડ્રોઇંગ પર બતાવી શકાશે નહીં). પરિણામે, સેગમેન્ટના નવા અંદાજો પ્રાપ્ત થશે B2*C2અને પોઈન્ટ: A2*.પોઈન્ટથી આગળ A2*અને AT 2*ઊભી રાશિઓ હાથ ધરવામાં આવે છે, અને બિંદુઓમાંથી 1 માંઅને A1આડી સંચાર રેખાઓ. અનુરૂપ રેખાઓનું આંતરછેદ નવા આડી પ્રક્ષેપણના બિંદુઓની સ્થિતિ નક્કી કરશે: સેગમેન્ટ B1*C1અને બિંદુઓ A1*.
પરિણામી ચોક્કસ સ્થિતિમાં, આપણે આ માટે અંતર અંદાજો બનાવી શકીએ છીએ: બિંદુથી A1*માટે સામાન્ય B1*C1.તેમના પરસ્પર આંતરછેદનો મુદ્દો છે K1*.આ બિંદુથી તે હાથ ધરવામાં આવે છે ઊભી રેખાજ્યાં સુધી તેઓ પ્રક્ષેપણ સાથે છેદે નહીં ત્યાં સુધી જોડાણો B2*C2.એક બિંદુ ચિહ્નિત થયેલ છે K2*.પરિણામે, સેગમેન્ટના અંદાજો પ્રાપ્ત થયા એકે, જે બિંદુથી જરૂરી અંતર છે એએક સીધી રેખા સેગમેન્ટમાં સૂર્ય.
આગળ, પ્રારંભિક સ્થિતિમાં અંતર અંદાજો બાંધવા જરૂરી છે. બિંદુ પરથી આ કરવા માટે K1*હાથ ધરવા માટે અનુકૂળ આડી રેખાજ્યાં સુધી તે પ્રક્ષેપણ સાથે છેદે નહીં V1S1અને આંતરછેદ બિંદુને ચિહ્નિત કરો K1.પછી એક બિંદુ બનાવવામાં આવે છે K2સેગમેન્ટના આગળના પ્રક્ષેપણ પર અને અંદાજો હાથ ધરવામાં આવે છે A1K1અને A2K2.બાંધકામોના પરિણામે, અંતરના અંદાજો પ્રાપ્ત થયા હતા, પરંતુ સેગમેન્ટની પ્રારંભિક અને નવી આંશિક સ્થિતિમાં બંનેમાં સૂર્યરેખાખંડ એકેસામાન્ય સ્થિતિ ધરાવે છે, અને આ હકીકત તરફ દોરી જાય છે કે તેના તમામ અંદાજો વિકૃત છે.
બીજા પરિભ્રમણ પર સેગમેન્ટને ફેરવવું જરૂરી છે એકેચોક્કસ સ્થિતિ માટે, જે અમને અંતરનું સાચું મૂલ્ય - પ્રક્ષેપણ નક્કી કરવા દેશે A2*K2**.તમામ બાંધકામોનું પરિણામ ફિગ. 3 માં બતાવવામાં આવ્યું છે.

કાર્ય નંબર 3-1. સાથેસેગમેન્ટ દ્વારા ઉલ્લેખિત ચોક્કસ સ્થિતિની સીધી રેખા સુધી એબી. જવાબ mm માં આપો (કોષ્ટક 1).પ્રોજેક્શન લેન્સ દૂર કરો
કોષ્ટક 1
કાર્ય નંબર 3-2.બિંદુથી સાચું અંતર શોધો એમસેગમેન્ટ દ્વારા આપવામાં આવેલ સામાન્ય સ્થિતિમાં સીધી રેખા પર ઇડી. જવાબ mm માં આપો (કોષ્ટક 2).
કોષ્ટક 2
પૂર્ણ થયેલ કાર્ય નંબર 3 તપાસી અને પાસ કરવું.
155*. સામાન્ય સ્થિતિમાં સીધી રેખાના સેગમેન્ટ AB નું કુદરતી કદ નક્કી કરો (ફિગ. 153, a).
ઉકેલ. જેમ જાણીતું છે, કોઈપણ પ્લેન પર સીધી રેખા સેગમેન્ટનું પ્રક્ષેપણ એ સેગમેન્ટની બરાબર છે (ડ્રોઇંગના સ્કેલને ધ્યાનમાં લેતા), જો તે આ પ્લેનની સમાંતર હોય.
(ફિગ. 153, બી). તે આનાથી અનુસરે છે કે ડ્રોઇંગને રૂપાંતરિત કરીને સમાંતરતા પ્રાપ્ત કરવી જરૂરી છે આ સેગમેન્ટના pl વી અથવા ચોરસ H અથવા સિસ્ટમ V, H ને ચોરસ પર લંબરૂપ અન્ય પ્લેન સાથે પૂરક બનાવો. V અથવા to pl. H અને તે જ સમયે આ સેગમેન્ટની સમાંતર.
ફિગ માં. 153, c એક વધારાના પ્લેન S નો પરિચય બતાવે છે, જે ચોરસને લંબ છે. H અને આપેલ સેગમેન્ટ AB ને સમાંતર.
પ્રક્ષેપણ a s b s એ સેગમેન્ટ AB ના કુદરતી મૂલ્યની બરાબર છે.
ફિગ માં. 153, d બીજી તકનીક બતાવે છે: સેગમેન્ટ AB એ બિંદુ Bમાંથી પસાર થતી સીધી રેખાની આસપાસ ફેરવવામાં આવે છે અને ચોરસ પર લંબ છે. H, સમાંતર સ્થિતિ માટે
pl V. આ કિસ્સામાં, બિંદુ B સ્થાને રહે છે, અને બિંદુ A નવી સ્થિતિ A 1 લે છે. ક્ષિતિજ નવી સ્થિતિમાં છે. પ્રક્ષેપણ a 1 b || x અક્ષ પ્રક્ષેપણ a" 1 b" એ સેગમેન્ટ AB ના કુદરતી કદ જેટલું છે.

156. દાના SABC પિરામિડડી (ફિગ. 154). પરિભ્રમણ પદ્ધતિનો ઉપયોગ કરીને પ્રક્ષેપણ પ્લેન બદલવાની પદ્ધતિનો ઉપયોગ કરીને પિરામિડની કિનારીઓ AS અને CSનું વાસ્તવિક કદ નક્કી કરો અને કિનારીઓ BS અને DS, અને પરિભ્રમણની ધરીને ચોરસ પર લંબરૂપ લો. એચ.
157*. બિંદુ A થી સીધી રેખા BC સુધીનું અંતર નક્કી કરો (ફિગ. 155, a).
ઉકેલ. બિંદુથી લીટી સુધીનું અંતર બિંદુથી લીટી સુધી દોરેલા લંબ સેગમેન્ટ દ્વારા માપવામાં આવે છે.
જો સીધી રેખા કોઈપણ પ્લેન (ફિગ. 155.6) માટે લંબરૂપ હોય, તો બિંદુથી સીધી રેખા સુધીનું અંતર બિંદુના પ્રક્ષેપણ વચ્ચેના અંતર દ્વારા માપવામાં આવે છે અને પ્રક્ષેપણ બિંદુઆ પ્લેન પર સીધી રેખા. જો સીધી રેખા V, H સિસ્ટમમાં સામાન્ય સ્થાન ધરાવે છે, તો પછી પ્રક્ષેપણ પ્લેન બદલીને બિંદુથી સીધી રેખા સુધીનું અંતર નક્કી કરવા માટે, V, H સિસ્ટમમાં બે વધારાના વિમાનો દાખલ કરવા જરૂરી છે.
પ્રથમ (ફિગ. 155, c) આપણે ચોરસ દાખલ કરીએ છીએ. એસ, સેગમેન્ટની સમાંતર BC (નવી S/H અક્ષ પ્રક્ષેપણ bс ની સમાંતર છે), અને અમે અંદાજો b s c s અને a s બનાવીએ છીએ. પછી (ફિગ. 155, ડી) અમે બીજો ચોરસ રજૂ કરીએ છીએ. T, કાટખૂણે સીધી રેખા BC (નવી અક્ષ T/S એ s સાથે b s પર લંબ છે). અમે એક સીધી રેખા અને બિંદુના અંદાજો બાંધીએ છીએ - t (b t) અને t સાથે. બિંદુઓ a t અને c t (b t) વચ્ચેનું અંતર બિંદુ A થી સીધી રેખા BC સુધીના અંતર l જેટલું છે.
ફિગ માં. 155, d, તે જ કાર્ય તેના સ્વરૂપમાં પરિભ્રમણ પદ્ધતિનો ઉપયોગ કરીને પૂર્ણ થાય છે, જેને સમાંતર ચળવળ પદ્ધતિ કહેવામાં આવે છે. પ્રથમ, સીધી રેખા BC અને બિંદુ A, તેમની સંબંધિત સ્થિતિને યથાવત રાખીને, અમુક (ડ્રોઇંગમાં દર્શાવેલ નથી) ચોરસની લંબરૂપ સીધી રેખાની આસપાસ ફેરવવામાં આવે છે. H, જેથી તે સીધી રેખા BC ચોરસની સમાંતર હોય. V. આ સ્ક્વેરની સમાંતર પ્લેનમાં મૂવિંગ પોઈન્ટ A, B, Cની સમકક્ષ છે. H. તે જ સમયે, ક્ષિતિજ. પ્રક્ષેપણ આપેલ સિસ્ટમ(BC + A) કદ અથવા રૂપરેખાંકનમાં બદલાતું નથી, ફક્ત x અક્ષની તુલનામાં તેની સ્થિતિ બદલાય છે. અમે ક્ષિતિજ મૂકીએ છીએ. x-અક્ષની સમાંતર સીધી રેખા BC નું પ્રક્ષેપણ (સ્થિતિ b 1 c 1) અને પ્રક્ષેપણ a 1 નક્કી કરો, c 1 1 1 = c-1 અને a 1 1 1 = a-1, અને a 1 1 1 ⊥ c 1 1 1. x-અક્ષની સમાંતર b"b" 1 , a"a" 1 , c"c" 1 સીધી રેખાઓ દોરવાથી, આપણે તેના પર આગળનો ભાગ શોધીએ છીએ. અંદાજો b" 1, a" 1, c" 1. આગળ, આપણે બિંદુઓ B 1, C 1 અને A 1 ને વિસ્તાર V ની સમાંતર પ્લેનમાં ખસેડીએ છીએ (તેમને બદલ્યા વિના પણ સંબંધિત સ્થિતિ), જેથી B 2 C 2 ⊥ pl મેળવવા માટે. H. આ કિસ્સામાં, સીધી રેખાનું પ્રક્ષેપણ આગળની તરફ લંબરૂપ હશે x,b અક્ષ 2 c" 2 = b" 1 c" 1, અને પ્રોજેક્શન a" 2 બનાવવા માટે તમારે b" 2 2" 2 = b" 1 2" 1 લેવાની જરૂર છે, 2"a" 2 ⊥ b" 2 c" દોરો. 2 અને બાજુ પર સેટ કરો a" 2 2" 2 = a" 1 2" 1 . હવે, 1 સાથે 2 અને 1 એ 2 સાથે વિતાવ્યા || x 1 આપણે 2 અને a 2 માંથી અંદાજો b 2 મેળવીએ છીએ અને બિંદુ A થી સીધી રેખા BC સુધી ઇચ્છિત અંતર l મેળવીએ છીએ. A થી BC સુધીનું અંતર બિંદુ A દ્વારા નિર્ધારિત પ્લેનને ફેરવીને નક્કી કરી શકાય છે અને આ પ્લેનની આડી તરફ T સ્થિત સીધી રેખા BC || pl એચ (ફિગ. 155, એફ).
બિંદુ A અને સીધી રેખા BC દ્વારા નિર્ધારિત પ્લેનમાં, એક આડી રેખા A-1 (ફિગ. 155, g) દોરો અને બિંદુ B ને તેની આસપાસ ફેરવો. R (R h ની બાજુમાં ડ્રોઇંગમાં ઉલ્લેખિત), A-1 ને લંબરૂપ; બિંદુ O પર બિંદુ B ના પરિભ્રમણનું કેન્દ્ર છે. હવે આપણે પરિભ્રમણ VO (ફિગ. 155, c) ની ત્રિજ્યાનું કુદરતી મૂલ્ય નક્કી કરીએ છીએ. જરૂરી સ્થિતિમાં, એટલે કે જ્યારે pl. T, બિંદુ A અને સીધી રેખા BC દ્વારા નિર્ધારિત, બનશે || pl H, બિંદુ B બિંદુ O થી Ob 1 ના અંતરે R h પર હશે (ત્યાં સમાન ટ્રેસ R h પર બીજી સ્થિતિ હોઈ શકે છે, પરંતુ O ની બીજી બાજુએ). બિંદુ b 1 એ ક્ષિતિજ છે. બિંદુ B નું પ્રક્ષેપણ તેને અવકાશમાં સ્થાન B 1 પર ખસેડ્યા પછી, જ્યારે બિંદુ A અને સીધી રેખા BC દ્વારા નિર્ધારિત પ્લેન T સ્થાન લે છે.
રેખાંકન (ફિગ. 155, i) સીધી રેખા b 1 1, આપણે ક્ષિતિજ મેળવીએ છીએ. સીધી રેખા BC નું પ્રક્ષેપણ, પહેલેથી જ સ્થિત છે || pl H એ A ના સમાન સમતલમાં છે. આ સ્થિતિમાં, a થી b 1 1 સુધીનું અંતર ઇચ્છિત અંતર l જેટલું છે. પ્લેન P, જેમાં આપેલ તત્વો આવેલા છે, તેને ચોરસ સાથે જોડી શકાય છે. એચ (ફિગ. 155, જે), વળાંક ચોરસ. આર તેની આસપાસ ક્ષિતિજ છે. ટ્રેસ બિંદુ A અને સીધી રેખા BC દ્વારા પ્લેનનો ઉલ્લેખ કરવાથી સીધી રેખાઓ BC અને A-1 (ફિગ. 155, l) ને સ્પષ્ટ કરવા તરફ આગળ વધીએ છીએ, અમે આ સીધી રેખાઓના નિશાન શોધીએ છીએ અને તેમના દ્વારા P ϑ અને P h નિશાનો દોરીએ છીએ. અમે ચોરસ સાથે સંયુક્ત (ફિગ. 155, મીટર) બનાવી રહ્યા છીએ. H સ્થિતિ આગળ. ટ્રેસ - P ϑ0 .
બિંદુ a દ્વારા આપણે ક્ષિતિજ દોરીએ છીએ. આગળનો પ્રક્ષેપણ; સંયુક્ત આગળનો ભાગ P ϑ0 ના સમાંતર P h ટ્રેસ પર બિંદુ 2માંથી પસાર થાય છે. બિંદુ A 0 - ચોરસ સાથે સંયુક્ત. H એ બિંદુ A ની સ્થિતિ છે. તેવી જ રીતે, આપણે બિંદુ B 0 શોધીએ છીએ. ચોરસ સાથે મળીને સીધો સૂર્ય. H સ્થિતિ બિંદુ B 0 અને બિંદુ m (સીધી રેખાના આડા ટ્રેસ)માંથી પસાર થાય છે.
બિંદુ A 0 થી સીધી રેખા B 0 C 0 સુધીનું અંતર જરૂરી અંતર l જેટલું છે.
તમે P h (ફિગ. 155, n અને o) નો માત્ર એક ટ્રેસ શોધીને દર્શાવેલ બાંધકામ હાથ ધરી શકો છો. આખું બાંધકામ આડી આસપાસના પરિભ્રમણ જેવું જ છે (જુઓ. ફિગ. 155, g, c, i): ટ્રેસ P h એ હોરિઝોન્ટલ pl માંથી એક છે. આર.
આ સમસ્યાને ઉકેલવા માટે આપવામાં આવેલી પદ્ધતિઓમાંથી, ડ્રોઇંગને રૂપાંતરિત કરવાની પસંદગીની પદ્ધતિ આડી અથવા આગળની આસપાસ પરિભ્રમણની પદ્ધતિ છે.



158. SABC પિરામિડ આપવામાં આવે છે (ફિગ. 156). અંતર નક્કી કરો:
a) સમાંતર હિલચાલની પદ્ધતિ દ્વારા આધારની ટોચની B થી તેની બાજુના AC સુધી;
b) પિરામિડની ટોચની S થી બાજુઓ BC અને આધારની AB સુધી આડી ફરતે ફેરવીને;
c) પ્રક્ષેપણ પ્લેન બદલીને ઉપરના S થી આધારની બાજુના AC સુધી.

159. પ્રિઝમ આપવામાં આવે છે (ફિગ. 157). અંતર નક્કી કરો:
a) પ્રક્ષેપણ પ્લેન બદલીને પાંસળી AD અને CF વચ્ચે;
b) પાંસળી BE અને CF વચ્ચે આગળની આસપાસ પરિભ્રમણ દ્વારા;
c) સમાંતર હલનચલન દ્વારા ધાર AD અને BE વચ્ચે.
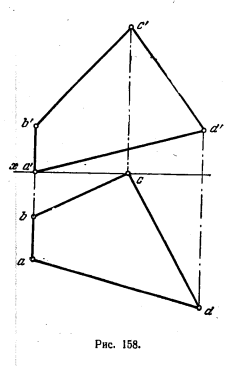
160. ચતુષ્કોણ ABCD (ફિગ. 158) ને ચોરસ સાથે ગોઠવીને તેનું વાસ્તવિક કદ નક્કી કરો. N. પ્લેનના માત્ર આડા ટ્રેસનો ઉપયોગ કરો.
161*. ક્રોસિંગ સીધી રેખાઓ AB અને CD (ફિગ. 159, a) વચ્ચેનું અંતર નક્કી કરો અને તેમના માટે સામાન્ય લંબરૂપ અંદાજો બનાવો.
ઉકેલ. ક્રોસિંગ લાઇન્સ વચ્ચેનું અંતર બંને રેખાઓ (ફિગ. 159, b) માટે લંબરૂપ સેગમેન્ટ (MN) દ્વારા માપવામાં આવે છે. દેખીતી રીતે, જો કોઈ એક સીધી રેખા કોઈપણ ચોરસ પર કાટખૂણે મૂકવામાં આવે. ટી, પછી
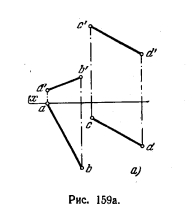
બંને રેખાઓ પર લંબરૂપ MN સેગમેન્ટ ચોરસની સમાંતર હશે. આ પ્લેન પર તેનું પ્રોજેક્શન જરૂરી અંતર દર્શાવશે. ચોરસ પર મેનાડ MN n AB ના જમણા ખૂણાનું પ્રક્ષેપણ. T એ mt n t અને t b t વચ્ચેનો કાટકોણ પણ છે, કારણ કે કાટકોણની એક બાજુ AMN છે, એટલે કે MN. ચોરસની સમાંતર ટી.
ફિગ માં. 159, c અને d, જરૂરી અંતર l પ્રક્ષેપણ વિમાનો બદલવાની પદ્ધતિ દ્વારા નક્કી કરવામાં આવે છે. પ્રથમ અમે એક વધારાનો ચોરસ રજૂ કરીએ છીએ. અંદાજો S, ચોરસને લંબરૂપ. એચ અને સીધી રેખા સીડીની સમાંતર (ફિગ. 159, સી). પછી અમે બીજો વધારાનો ચોરસ રજૂ કરીએ છીએ. T, ચોરસને લંબરૂપ. એસ અને સમાન સીધી રેખા સીડી (ફિગ. 159, ડી) માટે લંબરૂપ છે. હવે તમે પ્રક્ષેપણ a t b t પર લંબરૂપ બિંદુ c t (d t) થી m t n t દોરીને સામાન્ય લંબનું પ્રક્ષેપણ બનાવી શકો છો. બિંદુઓ m t અને n t એ સીધી રેખાઓ AB અને CD સાથે આ કાટખૂણે આંતરછેદના બિંદુઓના અંદાજો છે. બિંદુ m t (ફિગ. 159, e) નો ઉપયોગ કરીને આપણે a s b s પર m s શોધીએ છીએ: m s n s નું પ્રક્ષેપણ T/S અક્ષની સમાંતર હોવું જોઈએ. આગળ, m s અને n s માંથી આપણે ab અને cd પર m અને n શોધીએ છીએ અને તેમાંથી a"b" અને c"d" પર m" અને n" શોધીએ છીએ.
ફિગ માં. 159, c સમાંતર હલનચલનની પદ્ધતિનો ઉપયોગ કરીને આ સમસ્યાનો ઉકેલ બતાવે છે. પ્રથમ આપણે સીધી રેખા સીડીને ચોરસની સમાંતર મૂકીએ છીએ. V: પ્રક્ષેપણ c 1 d 1 || એક્સ. આગળ, આપણે સીધી રેખાઓ CD અને AB ને C 1 D 1 અને A 1 B 1 માંથી સ્થિતિ C 2 B 2 અને A 2 B 2 પર ખસેડીએ છીએ જેથી C 2 D 2 H: પ્રક્ષેપણ c" 2 d" 2 ⊥ પર લંબરૂપ હોય. x જરૂરી કાટખૂણેનો સેગમેન્ટ સ્થિત છે || pl H, અને તેથી m 2 n 2 એ AB અને CD વચ્ચે ઇચ્છિત અંતર l વ્યક્ત કરે છે. અમે a" 2 b" 2 અને c" 2 d" 2 પર m" 2, અને n" 2 ની સ્થિતિ શોધીએ છીએ, પછી અંદાજો m 1 અને m" 1, n 1 અને n" 1, અંતે, અંદાજો m" અને n", m અને n.

162. SABC પિરામિડ આપવામાં આવે છે (ફિગ. 160). પિરામિડના પાયાના કિનારી SB અને બાજુના AC વચ્ચેનું અંતર નક્કી કરો અને પ્રોજેક્શન પ્લેન બદલવાની પદ્ધતિનો ઉપયોગ કરીને SB અને AC માટે સામાન્ય લંબરૂપ અંદાજો બનાવો.

163. SABC પિરામિડ આપવામાં આવે છે (ફિગ. 161). પિરામિડના પાયાની ધાર SH અને બાજુ BC વચ્ચેનું અંતર નક્કી કરો અને સમાંતર વિસ્થાપન પદ્ધતિનો ઉપયોગ કરીને SX અને BC માટે સામાન્ય લંબરૂપ અંદાજો બનાવો.
164*. બિંદુ A થી પ્લેન સુધીનું અંતર નક્કી કરો કે જ્યાં પ્લેન દ્વારા નિર્દિષ્ટ કરવામાં આવે છે: a) ત્રિકોણ BCD (ફિગ. 162, a); b) નિશાનો (ફિગ. 162, બી).
ઉકેલ. જેમ તમે જાણો છો, બિંદુથી પ્લેન સુધીનું અંતર બિંદુથી પ્લેન તરફ દોરેલા લંબના મૂલ્ય દ્વારા માપવામાં આવે છે. આ અંતર કોઈપણ ક્ષેત્ર પર અંદાજવામાં આવે છે. જીવન-કદના અંદાજો, જો આપેલ વિમાનચોરસને લંબરૂપ અંદાજો (ફિગ. 162, સી). આ પરિસ્થિતિ ડ્રોઇંગને રૂપાંતરિત કરીને પ્રાપ્ત કરી શકાય છે, ઉદાહરણ તરીકે, વિસ્તાર બદલીને. અંદાજો ચાલો pl નો પરિચય કરીએ. S (ફિગ. 16c, d), ચોરસને લંબરૂપ. ત્રિકોણ BCD. આ કરવા માટે, અમે ચોરસમાં ખર્ચ કરીએ છીએ. ત્રિકોણ આડી B-1 અને પ્રક્ષેપણ અક્ષ S ને પ્રક્ષેપણ b-1 આડા પર કાટખૂણે મૂકો. અમે બિંદુ અને પ્લેન - a s અને સેગમેન્ટ c s d s ના અંદાજો બાંધીએ છીએ. a s થી c s d s સુધીનું અંતર પ્લેન સુધીના બિંદુના ઇચ્છિત અંતર l જેટલું છે.
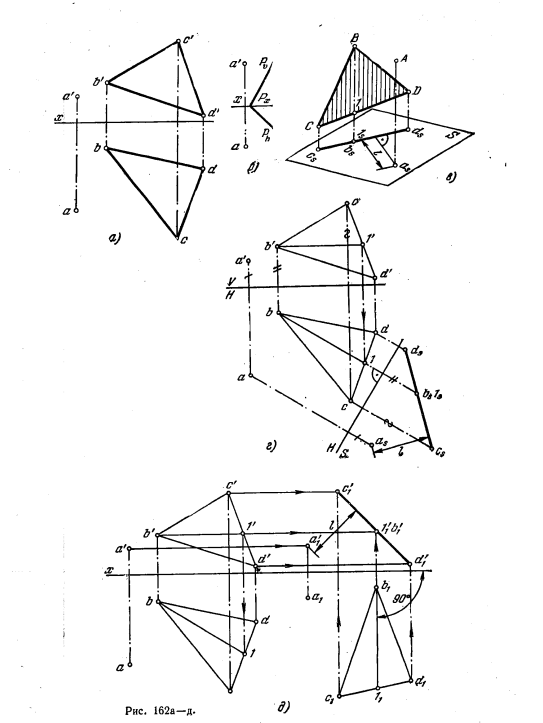
રિયોને. 162, d સમાંતર ચળવળની પદ્ધતિનો ઉપયોગ થાય છે. જ્યાં સુધી આડું પ્લેન B-1 પ્લેન V પર લંબરૂપ ન બને ત્યાં સુધી અમે સમગ્ર સિસ્ટમને ખસેડીએ છીએ: પ્રક્ષેપણ b 1 1 1 x અક્ષ પર લંબરૂપ હોવું જોઈએ. આ સ્થિતિમાં, ત્રિકોણનું પ્લેન આગળની તરફ પ્રક્ષેપિત થશે, અને બિંદુ A થી તે સુધીનું અંતર pl હશે. વિકૃતિ વિના વી.
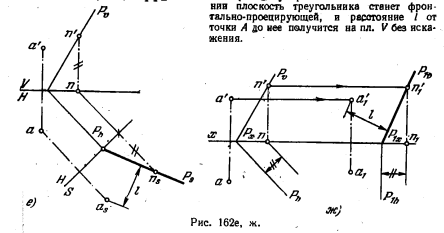
ફિગ માં. 162, b પ્લેન નિશાનો દ્વારા વ્યાખ્યાયિત થયેલ છે. અમે (ફિગ. 162, e) એક વધારાનો ચોરસ રજૂ કરીએ છીએ. S, ચોરસને લંબરૂપ. P: S/H અક્ષ P h માટે લંબ છે. બાકીના ચિત્રમાંથી સ્પષ્ટ છે. ફિગ માં. 162, g એક ચળવળનો ઉપયોગ કરીને સમસ્યા હલ કરવામાં આવી હતી: pl. P પોઝિશન P 1 માં જાય છે, એટલે કે તે ફ્રન્ટ-પ્રોજેક્ટિંગ બને છે. ટ્રેક. P 1h એ x અક્ષ પર લંબ છે. અમે પ્લેનની આ સ્થિતિમાં આગળનો ભાગ બનાવીએ છીએ. આડું ટ્રેસ એ બિંદુ n" 1, n 1 છે. ટ્રેસ P 1ϑ P 1x અને n 1માંથી પસાર થશે. a" 1 થી P 1ϑનું અંતર જરૂરી અંતર l જેટલું છે.
165. SABC પિરામિડ આપવામાં આવે છે (ફિગ 160 જુઓ). સમાંતર ચળવળ પદ્ધતિનો ઉપયોગ કરીને બિંદુ A થી SBC પિરામિડની ધાર સુધીનું અંતર નક્કી કરો.
166. SABC પિરામિડ આપવામાં આવે છે (ફિગ 161 જુઓ). સમાંતર વિસ્થાપન પદ્ધતિનો ઉપયોગ કરીને પિરામિડની ઊંચાઈ નક્કી કરો.
167*. ક્રોસિંગ લાઇન્સ AB અને CD વચ્ચેનું અંતર નક્કી કરો (જુઓ. ફિગ. 159,a) આ રેખાઓ દ્વારા દોરવામાં આવેલા સમાંતર પ્લેન વચ્ચેના અંતર તરીકે.

ઉકેલ. ફિગ માં. 163, અને પ્લેન P અને Q એકબીજાના સમાંતર છે, જેમાંથી pl. Q એ AB અને pl ની સમાંતર CD દ્વારા દોરવામાં આવે છે. P - ચોરસની સમાંતર AB દ્વારા. પ્ર. આવા વિમાનો વચ્ચેનું અંતર એ AB અને CDને સીધી રેખાઓ પાર કરવા વચ્ચેનું અંતર ગણવામાં આવે છે. જો કે, તમે તમારી જાતને માત્ર એક જ પ્લેન બનાવવા માટે મર્યાદિત કરી શકો છો, ઉદાહરણ તરીકે Q, AB ની સમાંતર, અને પછી બિંદુ A થી આ પ્લેન સુધીનું ઓછામાં ઓછું અંતર નક્કી કરો.
ફિગ માં. 163, c એબીની સમાંતર સીડી દ્વારા દોરવામાં આવેલ પ્લેન Q બતાવે છે; "e" સાથે કરવામાં આવેલા અંદાજોમાં || a"b" અને CE || ab pl બદલવાની પદ્ધતિનો ઉપયોગ કરીને. અંદાજો (ફિગ. 163, c), અમે એક વધારાનો ચોરસ રજૂ કરીએ છીએ. S, ચોરસને લંબરૂપ. વી અને તે જ સમયે

ચોરસને લંબરૂપ પ્ર. S/V અક્ષ દોરવા માટે, આ પ્લેનમાં આગળનો D-1 લો. હવે આપણે d"1" (ફિગ. 163, c) માટે S/V લંબરૂપ દોરીએ છીએ. Pl. Q ચોરસ પર દર્શાવવામાં આવશે. s d s સાથે સીધી રેખા તરીકે S. બાકીના ચિત્રમાંથી સ્પષ્ટ છે.
168. SABC પિરામિડ આપવામાં આવે છે (ફિગ 160 જુઓ). પાંસળી SC અને AB વચ્ચેનું અંતર નક્કી કરો: 1) વિસ્તાર બદલવાની પદ્ધતિ. અંદાજો, 2) સમાંતર ચળવળની પદ્ધતિ.
169*. સમાંતર વિમાનો વચ્ચેનું અંતર નક્કી કરો, જેમાંથી એક સીધી રેખાઓ AB અને AC દ્વારા અને બીજી સીધી રેખાઓ DE અને DF (ફિગ. 164, a) દ્વારા વ્યાખ્યાયિત કરવામાં આવે છે. જ્યારે પ્લેન નિશાનો દ્વારા નિર્દિષ્ટ કરવામાં આવે ત્યારે કેસ માટે બાંધકામ પણ કરો (ફિગ. 164, બી).
ઉકેલ. સમાંતર પ્લેન વચ્ચેનું અંતર (ફિગ. 164, c) એક પ્લેનના કોઈપણ બિંદુથી બીજા પ્લેન સુધી લંબ દોરીને નક્કી કરી શકાય છે. ફિગ માં. 164, g એક વધારાનો ચોરસ રજૂ કરવામાં આવ્યો હતો. S લંબચોરસ ચોરસ. H અને આપેલ બંને વિમાનોને. S.H અક્ષ આડી તરફ લંબ છે. પ્લેનમાંના એકમાં દોરવામાં આવેલ આડું પ્રક્ષેપણ. અમે આ પ્લેનનું પ્રોજેક્શન અને ચોરસ પરના બીજા પ્લેનમાં એક બિંદુ બનાવીએ છીએ. 5. બિંદુ d s થી સીધી રેખા l s a s નું અંતર સમાંતર વિમાનો વચ્ચેના જરૂરી અંતર જેટલું છે.
ફિગ માં. 164, ડી બીજું બાંધકામ આપવામાં આવ્યું છે (સમાંતર ચળવળની પદ્ધતિ અનુસાર). AB અને AC ને છેદતી રેખાઓ દ્વારા દર્શાવવામાં આવેલ સમતલ ચોરસ પર લંબરૂપ હોય તે માટે. વી, ક્ષિતિજ. અમે આ પ્લેનનું આડું પ્રક્ષેપણ x અક્ષ પર લંબરૂપ સેટ કર્યું છે: 1 1 2 1 ⊥ x. આગળની વચ્ચેનું અંતર. બિંદુ D નું પ્રક્ષેપણ d" 1 અને સીધી રેખા a" 1 2" 1 (પ્લેનનો આગળનો પ્રક્ષેપણ) વિમાનો વચ્ચેના જરૂરી અંતર જેટલું છે.


ફિગ માં. 164, e વધારાના ચોરસનો પરિચય બતાવે છે. S, H વિસ્તાર અને આપેલ વિમાનો P અને Q માટે લંબરૂપ છે (S/H અક્ષ એ P h અને Q h નિશાનો માટે લંબ છે). અમે P s અને Q s ના નિશાન બનાવીએ છીએ. તેમની વચ્ચેનું અંતર (જુઓ. ફિગ. 164, c) પ્લેન P અને Q વચ્ચેના ઇચ્છિત અંતર l જેટલું છે.
ફિગ માં. 164, g જ્યારે ક્ષિતિજ હોય ત્યારે P 1 અને Q 1 ની સ્થિતિ પર P 1 n Q 1 પ્લેનની હિલચાલ બતાવે છે. નિશાનો x-અક્ષ પર લંબરૂપ હોવાનું બહાર આવે છે. નવા મોરચા વચ્ચે અંતર. નિશાનો P 1ϑ અને Q 1ϑ જરૂરી અંતર l સમાન છે.
170. આપેલ સમાંતર ABCDEFGH (ફિગ. 165). અંતર નક્કી કરો: a) સમાંતર ના પાયા વચ્ચે - l 1; b) ચહેરા ABFE અને DCGH વચ્ચે - l 2; c) ADHE અને BCGF-l 3 ના ચહેરા વચ્ચે.
બિંદુથી રેખા સુધીનું અંતર એ બિંદુથી રેખા સુધી દોરેલા લંબરૂપની લંબાઈ છે. IN વર્ણનાત્મક ભૂમિતિતે નક્કી છે ગ્રાફિકલીનીચેના અલ્ગોરિધમનો અનુસાર.
અલ્ગોરિધમ
- સીધી રેખા એવી સ્થિતિમાં ખસેડવામાં આવે છે જેમાં તે કોઈપણ પ્રક્ષેપણ પ્લેનની સમાંતર હશે. આ હેતુ માટે, ઓર્થોગોનલ અંદાજોને રૂપાંતરિત કરવાની પદ્ધતિઓનો ઉપયોગ કરવામાં આવે છે.
- એક બિંદુ પરથી કાટખૂણે રેખા તરફ દોરવામાં આવે છે. મૂળમાં આ બાંધકામનીજમણા ખૂણાના પ્રક્ષેપણ પર પ્રમેય આવેલું છે.
- કાટખૂણેની લંબાઈ તેના અનુમાનોનું રૂપાંતર કરીને અથવા જમણી બાજુની ત્રિકોણ પદ્ધતિનો ઉપયોગ કરીને નક્કી કરવામાં આવે છે.
નીચેનો આંકડો બતાવે છે જટિલ ચિત્રબિંદુ M અને રેખા b સેગમેન્ટ CD દ્વારા વ્યાખ્યાયિત. તમારે તેમની વચ્ચેનું અંતર શોધવાની જરૂર છે.
અમારા અલ્ગોરિધમ મુજબ, પ્રથમ વસ્તુ સીધી રેખાને સ્થાન પર ખસેડવાનું છે પ્લેનની સમાંતરઅંદાજો તે સમજવું અગત્યનું છે કે પરિવર્તનો પછી, બિંદુ અને રેખા વચ્ચેનું વાસ્તવિક અંતર બદલવું જોઈએ નહીં. એટલા માટે અહીં પ્લેન રિપ્લેસમેન્ટ પદ્ધતિનો ઉપયોગ કરવો અનુકૂળ છે, જેમાં અવકાશમાં આકૃતિઓ ખસેડવાની જરૂર નથી.
બાંધકામના પ્રથમ તબક્કાના પરિણામો નીચે દર્શાવેલ છે. આકૃતિ બતાવે છે કે કેવી રીતે વધારાનું આગળનું પ્લેન P 4 b ની સમાંતર રજૂ કરવામાં આવે છે. IN નવી સિસ્ટમ(P 1, P 4) બિંદુઓ C"" 1, D"" 1, M"" 1 X અક્ષ 1 થી C"", D"", M"" X અક્ષથી સમાન અંતરે છે.

અલ્ગોરિધમનો બીજો ભાગ હાથ ધરીને, M"" 1 થી આપણે કાટખૂણે M"" 1 N"" 1 ને સીધી રેખા b"" 1 સુધી નીચે કરીએ છીએ, કારણ કે b અને MN વચ્ચેનો જમણો ખૂણો MND પ્લેન P પર પ્રક્ષેપિત છે. 4 પૂર્ણ કદમાં. સંચાર લાઇનનો ઉપયોગ કરીને, અમે બિંદુ N" ની સ્થિતિ નક્કી કરીએ છીએ અને MN સેગમેન્ટના પ્રક્ષેપણ M"N" ને હાથ ધરીએ છીએ.

ચાલુ અંતિમ તબક્કોતમારે તેના અંદાજો M"N" અને M"" 1 N"" 1 પરથી MN સેગમેન્ટનું કદ નક્કી કરવાની જરૂર છે. આ માટે અમે નિર્માણ કરી રહ્યા છીએ જમણો ત્રિકોણ M"" 1 N"" 1 N 0, જેની બાજુ N"" 1 N 0 છે તફાવત સમાન(Y M 1 – Y N 1) X 1 અક્ષમાંથી M" અને N" બિંદુઓને દૂર કરી રહ્યા છીએ. ત્રિકોણ M"" 1 N"" 1 N 0 ના કર્ણો M"" 1 N 0 ની લંબાઈ M થી b સુધીના ઇચ્છિત અંતરને અનુલક્ષે છે.

બીજો ઉકેલ
- સીડી સાથે સમાંતર, અમે એક નવું રજૂ કરીએ છીએ આગળનું વિમાનપૃષ્ઠ 4. તે X 1 અક્ષ સાથે P 1 અને X 1 ∥C"D" ને છેદે છે. પ્લેન બદલવાની પદ્ધતિ અનુસાર, અમે આકૃતિમાં બતાવ્યા પ્રમાણે C"" 1, D"" 1 અને M"" 1 પોઇન્ટના અંદાજો નક્કી કરીએ છીએ.
- C"" 1 D"" 1 ને લંબરૂપ અમે એક વધારાનું નિર્માણ કરીએ છીએ આડું વિમાન P 5 કે જેના પર સીધી રેખા b બિંદુ C" 2 = b" 2 નો અંદાજ છે.
- બિંદુ M અને રેખા b વચ્ચેનું અંતર લાલ રંગમાં દર્શાવેલ M" 2 C" 2 સેગમેન્ટની લંબાઈ દ્વારા નક્કી કરવામાં આવે છે.

સમાન કાર્યો:







