Ga ubogajo, zato je to načelo eno od ključne določbe moderna fizika. Enačbe gibanja, dobljene z njegovo pomočjo, se imenujejo Euler-Lagrangeove enačbe.
Prvo formulacijo principa je podal P. Maupertuis leta in takoj izpostavil njegovo univerzalno naravo ter menil, da je uporaben v optiki in mehaniki. Od to načelo izpeljal je zakone odboja in loma svetlobe.
Zgodba
Maupertuis je prišel do tega načela iz občutka, da popolnost vesolja zahteva določeno ekonomičnost narave in je v nasprotju s kakršno koli nekoristno porabo energije. Naravno gibanje mora biti takšna, da je določena količina minimalna. Vse, kar je moral storiti, je bilo najti to vrednost, kar je nadaljeval. Bila je zmnožek trajanja (časa) gibanja znotraj sistema z dvakratno vrednostjo, ki jo zdaj imenujemo kinetična energija sistema.
Euler (in "Réflexions sur quelques loix générales de la nature", 1748) sprejme načelo najmanjše količine dejanja in dejanje imenuje "napor". Njegov izraz v statiki ustreza temu, kar bi zdaj imenovali potencialna energija, tako da je njegova izjava o najmanjšem delovanju v statiki enakovredna pogoju minimalne potencialne energije za ravnovesno konfiguracijo.
V klasični mehaniki
Načelo najmanjšega delovanja služi kot temeljna in standardna osnova Lagrangeovih in Hamiltonovih formulacij mehanike.
Najprej si oglejmo konstrukcijo takole: Lagrangeva mehanika. Na primer fizični sistem z eno prostostno stopnjo, spomnimo, da je dejanje funkcional glede na (posplošene) koordinate (v primeru ene prostostne stopnje - eno koordinato), torej je izraženo tako, da je vsaka možna različica funkcija je povezana z določenim številom – dejanjem (v tem smislu lahko rečemo, da je dejanje kot funkcional pravilo, ki omogoča poljubno dano funkcijo izračuna natančno določeno število - imenovano tudi dejanje). Akcija izgleda takole:
kjer je lagrangian sistema, odvisen od posplošene koordinate, njegovega prvega odvoda glede na čas in tudi, po možnosti, eksplicitno glede na čas. Če ima sistem večje število prostostnih stopenj, potem je Lagrangian odvisen od večjega števila posplošenih koordinat in njihovih prvih odvodov glede na čas. Tako je dejanje skalarni funkcional, odvisen od trajektorije telesa.
Dejstvo, da je dejanje skalarno, omogoča enostavno pisanje v poljubnih posplošenih koordinatah, glavno je, da je položaj (konfiguracija) sistema nedvoumno označen z njimi (na primer, namesto kartezičnih koordinat so te lahko polarne koordinate, razdalje med točkami sistema, koti ali njihove funkcije itd. .d.).
Akcija je lahko izračunana za povsem poljubno trajektorijo, ne glede na to, kako »divje« in »nenaravno« je. Vendar pa je v klasični mehaniki med celotnim naborom možnih trajektorij le ena, po kateri bo telo dejansko šlo. Načelo mirujočega delovanja natančno odgovarja na vprašanje, kako se bo telo dejansko gibalo:
To pomeni, da če je Lagrangeov sistem podan, lahko z variacijskim računom natančno ugotovimo, kako se bo telo gibalo, tako da najprej dobimo enačbe gibanja - Euler-Lagrangeove enačbe in jih nato rešimo. To omogoča ne le resno posploševanje formulacije mehanike, temveč tudi izbiro najprimernejših koordinat za vsak določen problem, ne omejeno na kartezične, kar je lahko zelo koristno za pridobivanje najpreprostejših in najlažje rešljivih enačb.
kje je Hamiltonova funkcija tega sistema; - (generalizirane) koordinate, - konjugirani (generalizirani) impulzi, karakterizirani skupaj v vsakem ta trenutekčas, dinamično stanje sistema in, vsak je funkcija časa, kar označuje razvoj (gibanje) sistema. V tem primeru je treba za pridobitev enačb gibanja sistema v obliki Hamiltonovih kanoničnih enačb tako zapisano dejanje spreminjati neodvisno za vse in .
Upoštevati je treba, da če je iz pogojev problema načeloma mogoče najti zakon gibanja, potem je to samodejno ne pomeni, da je možno sestaviti funkcional, ki jemlje stacionarna vrednost s pravim gibanjem. Primer je skupno gibanje električnih nabojev in monopolov - magnetni naboji- v elektromagnetnem polju. Njihovih enačb gibanja ni mogoče izpeljati iz načela mirujočega delovanja. Podobno imajo nekateri Hamiltonovi sistemi enačbe gibanja, ki jih ni mogoče izpeljati iz tega načela.
Primeri
Trivialni primeri pomagajo oceniti uporabo principa delovanja prek Euler-Lagrangeovih enačb. Prosti delec (masa m in hitrost v) v evklidskem prostoru giblje premočrtno. Z uporabo Euler-Lagrangeovih enačb lahko to prikažemo v polarnih koordinatah, kot sledi. V odsotnosti potenciala je Lagrangeova funkcija preprosto enaka kinetični energiji
V pravokotni sistem koordinate
IN polarne koordinate kinetične energije in s tem postane Lagrangeova funkcija
Radialna in kotna komponenta enačb postaneta:
Reševanje teh dveh enačb
Tukaj je pogojni zapis za neskončno večkratno funkcionalno integracijo po vseh trajektorijah x(t) in je Planckova konstanta. Poudarjamo, da se načeloma delovanje v eksponenti pojavi (ali se lahko pojavi) samo pri preučevanju evolucijskega operatorja v kvantni mehaniki, vendar je za sisteme, ki imajo natančen klasični (nekvantni) analog, popolnoma enako običajnemu klasična akcija.
Matematična analiza tega izraza v klasični meji - za dovolj velike , to je za zelo hitre oscilacije imaginarne eksponente - pokaže, da se velika večina vseh možnih trajektorij v tem integralu v meji (formalno za ) izničuje. Skoraj za vsako pot obstaja pot, na kateri bo fazni premik ravno nasproten in bodo prispevali nič. Samo tiste trajektorije, za katere je delovanje blizu skrajne vrednosti (za večino sistemov - na minimum), se ne zmanjšajo. Čisto je matematično dejstvo iz teorije funkcij kompleksne spremenljivke; Na njej na primer temelji metoda stacionarne faze.
Posledično je delec v popolno strinjanje z zakoni kvantne mehanike se giblje hkrati po vseh trajektorijah, vendar v normalnih pogojih k opazovanim vrednostim prispevajo le trajektorije, ki so blizu stacionarnim (to je klasičnim). Zaradi kvantna mehanika meji visokih energij spremeni v klasično, potem lahko domnevamo, da je to kvantno mehanska izpeljava klasični princip stacionarnost delovanja.
V kvantni teoriji polja
IN kvantna teorija Polja se uspešno uporablja tudi princip stacionarnosti delovanja. Lagrangeva gostota tukaj vključuje operatorje ustreznih kvantnih polj. Čeprav je tu v bistvu pravilneje (z izjemo klasične meje in deloma kvaziklasike) govoriti ne o principu stacionarnosti delovanja, temveč o Feynmanovi integraciji po trajektorijah v konfiguracijskem ali faznem prostoru teh polj - z uporabo pravkar omenjeno Lagrangevo gostoto.
Nadaljnje posploševanje
V širšem smislu se dejanje razume kot funkcionalnost, ki določa preslikavo iz konfiguracijskega prostora v niz realna števila in na splošno ni nujno, da je integral, ker so nelokalna dejanja načeloma možna, vsaj v teoriji. Še več, konfiguracijski prostor ni nujno funkcijski prostor, ker ima lahko nekomutativno geometrijo.
Opombe
Literatura
- Variacijski principi mehanike. sob. članki klasikov znanosti. Uredil Polak L.S. M.: Fizmatgiz. 1959.
- Lanczos K. Variacijski principi mehanike. - M.: Fizmatgiz. 1965.
- Berdičevski V. L. Variacijski principi mehanike kontinuum. M.: Nauka, 1983. - 448 str.
NAČELO NAJMANJ UČINKOVITEGA
Eden od variacijski principi mehanike, po Krom za tega razreda mehanska gibanja v primerjavi med seboj. sistema, velja tisto, za katero fizično. velikost, imenovana dejanje, ima najmanjšo (natančneje, stacionarno) vrednost. Običajno se N. d. uporablja v eni od dveh oblik.
a) N. d. v obliki Hamilton - Ostrogradsky ugotavlja, da je med vsemi kinematično možnimi premiki sistema iz ene konfiguracije v drugo (blizu prve), ki se zgodijo v istem časovnem obdobju, veljavno tisto, za katero Hamiltonovo dejanje S bo najmanjše. matematika izraz N. d.p. ima v tem primeru obliko: dS = 0, kjer je d simbol nepopolne (izohrone) variacije (tj. za razliko od popolne variacije čas v njej ne variira).
b) N. d. v obliki Maupertuis - Lagrange ugotavlja, da med vsemi kinematično možnimi premiki sistema iz ene konfiguracije v drugo, ki se izvajajo ob ohranjanju iste količine. skupna energija realno je tisto, pri katerem je Lagrangevo delovanje W minimalno. matematika izraz N. d.p ima v tem primeru obliko DW = 0, kjer je D simbol totalne variacije (za razliko od principa Hamilton-Ostrogradskega se tukaj ne spreminjajo samo koordinate in hitrosti, ampak tudi čas gibanja sistem iz ene konfiguracije v drugo). N.d.p.v. V tem primeru velja le za konzervativne in še več holonomne sisteme, medtem ko je v prvem primeru nekonzervativni princip bolj splošen in ga je mogoče razširiti predvsem na nekonservativne sisteme. N.D.P. se uporabljajo za sestavljanje enačb mehanskega gibanja. sistemov in preučevanje splošnih principov teh gibanj. Z ustrezno posplošitvijo pojmov najde NDP aplikacije v mehaniki zveznega medija, v elektrodinamiki in kvantumu. mehanika itd.
- - enako kot...
- - m-operator, operator minimizacije in, - način konstruiranje novih funkcij iz drugih funkcij, sestavljenih iz naslednjega...
Matematična enciklopedija
- - eno od variacijskih načel mehanike, po katerem se za določen razred mehanskih gibov primerjajo med seboj. sistem izvaja tisto, za kar je minimalno delovanje...
Naravoslovje. enciklopedični slovar
- - eden od najpomembnejši zakoni mehanika, ki jo je ustanovil ruski znanstvenik M.V. Ostrogradski...
Ruska enciklopedija
-
Slovar pravnih izrazov
- - v ustavnem pravu številnih držav načelo, po katerem so splošno priznana načela in norme mednarodno pravo so sestavni del pravni sistem zadevna država...
Enciklopedija odvetnika
- - v ustavnem pravu številnih držav načelo, po katerem so splošno priznane norme mednarodnega prava sestavni del nacionalnega pravnega reda ...
Velik pravni slovar
- - najkrajša razdalja od središča eksplozivnega naboja do prosta površina- line on nay-malkoto odpornost - křivka nejmenšího odporu - Line der geringsten Festigkeit - robbantás minimális ellenállási tengelyvonala - hamgiin baga...
Gradbeni slovar
- - če je možno premikati točke deformabilnega telesa v različnih smereh, se vsaka točka tega telesa premika v smeri najmanjšega upora...
Enciklopedični slovar metalurgije
- - pravilo, po katerem se obstoječe zaloge običajno vrednotijo po najnižji nabavni vrednosti ali po najnižji prodajni ceni...
Slovar poslovnih izrazov
- - v ustavnem pravu številnih držav - načelo, po katerem so splošno priznana načela in norme mednarodnega prava sestavni del pravnega reda zadevne države in delujejo ...
Enciklopedični slovar ekonomije in prava
- - eno od variacijskih načel mehanike, po katerem se za določen razred gibanj primerjajo med seboj mehanski sistem resnično je tisto, za kar fizična količina ...
- - enako kot Gaussovo načelo ...
Velika sovjetska enciklopedija
- - eden od variacijskih principov mehanike; enako kot princip najmanjšega delovanja...
Velika sovjetska enciklopedija
- - eno od variacijskih načel mehanike, po katerem je za določen razred gibanj mehanskega sistema v primerjavi med seboj tisti, za katerega je delovanje minimalno...
Velik enciklopedični slovar
- - Knjiga Izberite največ enostaven način dejanja, izogibanje oviram, izogibanje težavam ...
besedni zvezek Ruski knjižni jezik
»NAČELO NAJMANJŠE VREDNOSTI« v knjigah
2.5.1. Načelo delovanja naprave
Iz knjige Zabavna elektronika [Nekonvencionalna enciklopedija uporabnih vezij] avtor Kaškarov Andrej Petrovič2.5.1. Princip delovanja naprave Princip delovanja naprave je preprost. Ko se svetlobni tok, ki ga oddaja LED HL1, odbije od predmeta in zadene fotodetektor, elektronska enota, izvedena na 2 mikrovezjih - primerjalniku KR1401SA1 in časovniku KR1006VI1, proizvede
Načelo delovanja terafima
Iz knjige Skrivno znanje. Teorija in praksa Agni joge avtor Roerich Elena IvanovnaPrincip delovanja terafima 02.24.39 Saj veste, da nas vsako zavedanje in predstavljanje kateregakoli predmeta s tem približa temu. Kot veste, se psihične plasti predmeta lahko prenesejo na njegove terafim. Astralni terafimi oddaljenih svetov in
Trije pogoji za uporabo zakona najmanjšega napora
Iz knjige Modrost Deepaka Chopre [Pridobite, kar želite, tako da sledite 7 zakonom vesolja] avtorja Tim GoodmanTrije pogoji za uporabo zakona Najmanj truda Poglejmo, kakšni pogoji so potrebni, da v svoje življenje privabimo ta ustvarjalni tok energije iz vesolja – energijo ljubezni, in torej, da začne v tvojem življenju delovati Zakon najmanjšega napora.
19. poglavje NAČELO NAJMANJŠEGA UČINKA
Iz knjige 6. Elektrodinamika avtor Feynman Richard Phillips19. poglavje NAČELO NAJMANJŠEGA UČINKA Dodatek po predavanju Ko sem bil v šoli, me je naš učitelj fizike Bader nekoč poklical po pouku in rekel: »Videti si, kot da si strašno utrujen od vsega; poslušaj eno zanimivost
5. Načelo najmanjšega delovanja
Iz knjige Revolucija v fiziki avtorja de Broglie Louis5. Načelo najmanjšega delovanja Dinamične enačbe materialna točka v polju sil, ki imajo potencial, je mogoče pridobiti na podlagi načela, da v splošni pogled se imenuje Hamiltonovo načelo ali načelo stacionarnega delovanja. Po tem principu od vseh
Princip delovanja
Iz knjige Ključavničarski vodnik po ključavnicah avtorja Phillips BillPrincip delovanja Sposobnost vrtenja cilindra je odvisna od položaja zatičev, ki je določen z gravitacijo, delovanjem vzmeti in silo ključa (ali glavnega ključa; za informacije o glavnih ključih glej poglavje 9) . Če ključa ni, pritisnejo gravitacija in vzmeti
Princip stacionarnega delovanja
Iz knjige Velika sovjetska enciklopedija (ST) avtorja TSBNačelo najmanjšega delovanja
TSBNačelo najmanjše prisile
Iz knjige Velika sovjetska enciklopedija (NA) avtorja TSB2.5.1. Princip delovanja
Iz knjige Relejna zaščita v elektrodistribucijskih omrežjih B90 avtor Bulychev Alexander Vitalievich2.5.1. Princip delovanja V električnih omrežjih z dvosmernim napajanjem in v obročnih omrežjih običajna tokovna zaščita ne more delovati selektivno. Na primer v električno omrežje z dvema napajalnikoma (sl. 2.15), kjer so na obeh straneh nameščena stikala in zaščite
Princip delovanja
Iz knjige Turbo-Gopher. Kako se nehati zajebavati in začeti živeti avtor Leuškin DmitrijPrincip delovanja “Process this” je pravzaprav nekakšen “makro”, ki z eno besedno zvezo v podzavesti sproži cel kup procesov, katerih namen je obdelava izbranega mentalnega materiala. Ta upravljalnik sam vključuje 7 različnih modulov, od katerih nekateri
Kako začeti slediti zakonu najmanjšega napora: tri nujna dejanja
Iz knjige A Guide to Growing Capital avtorji Joseph Murphy, Dale Carnegie, Eckhart Tolle, Deepak Chopra, Barbara Sher, Neil Walsh avtor Stern ValentinKako začeti slediti zakonu najmanjšega napora: tri potrebna dejanja Da bi zakon najmanjšega napora začel delovati, ne smete le izpolnjevati treh zgoraj omenjenih pogojev, temveč morate izvesti tudi tri dejanja: začnite sprejemati svet, kakršen je Sprejmite
11. Fizika in aikido najmanjše akcije
avtor Mindell Arnold11. Fizika in aikido najmanjšega učinka Ko piha, je samo veter. Ko dežuje, je samo dež. Ko oblaki minejo, skozi njih posije sonce. Če se odprete vpogledu, potem ste eno z vpogledom. In lahko ga popolnoma uporabite. Če se odpreš
Leibnizovo načelo najmanjšega delovanja "Vis Viva"
Iz knjige Geopsihologija v šamanizmu, fiziki in taoizmu avtor Mindell ArnoldLeibnizovo načelo najmanjšega delovanja "Vis Viva" Za načelo najmanjšega dejanja se moramo vsi zahvaliti Wilhelmu Gottfriedu Leibnizu (1646–1716). Leibniz, eden prvih "modernih" fizikov in matematikov, je živel v Newtonovem času – obdobju, ko so bili znanstveniki bolj odprti
Aikido - utelešenje načela najmanjšega delovanja
Iz knjige Geopsihologija v šamanizmu, fiziki in taoizmu avtor Mindell ArnoldAikido – utelešenje načela najmanjšega delovanja Našo psihologijo in tehnologijo v veliki meri poganja koncept, ki je zelo blizu ideji najmanjšega dejanja. Nenehno si prizadevamo olajšati svoje življenje. Današnji računalniki niso dovolj hitri; Morajo
Ko sem bil v šoli, me je naš učitelj fizike, Bader, nekoč poklical po pouku in rekel: »Videti si, kot da si strašno utrujen od vsega; poslušaj eno zanimivo stvar.” In povedal mi je nekaj, kar se mi je zdelo res fascinantno. Še zdaj, čeprav je od takrat minilo že kar nekaj časa, me še naprej fascinira. In vsakič, ko se spomnim, kaj sem rekel, se vrnem k delu. In tokrat sem se med pripravami na predavanje zalotil, da spet analiziram iste stvari. In namesto da bi se pripravljal na predavanje, sem sprejel odločitev nova naloga. Predmet, o katerem govorim, je načelo najmanjšega ukrepanja.
To mi je takrat rekel moj učitelj Bader: »Na primer, da imate delec v gravitacijskem polju; ta delec, ko je prišel od nekje, se prosto premika nekje drugje na drugo točko. Vrgel si ga, recimo, gor, pa je poletel navzgor in potem padel.
Kar nekaj časa je potrebovala, da je potovala od startnega do končnega mesta. Zdaj poskusite z drugim gibanjem. Naj se premika »od tukaj do tukaj« ne več kot prej, ampak takole:

a vseeno sem se znašel na pravem mestu v istem trenutku kot prej.”
»In tako,« je nadaljeval učitelj, »če izračunate kinetično energijo v vsakem trenutku na poti delca, od nje odštejete potencialno energijo in integrirate razliko v celotnem času, ko je prišlo do gibanja, boste videli da bo število, ki ga dobite, večje kot pri resničnem gibanju delca.
Z drugimi besedami, Newtonove zakone je mogoče oblikovati ne v obliki, ampak na naslednji način: povprečna kinetična energija minus povprečna potencialna energija doseže najnižjo vrednost vzdolž poti, po kateri se predmet dejansko premika z enega mesta na drugega.
Poskušal vam bom to malo bolj jasno razložiti.
Če vzamemo gravitacijsko polje in označimo trajektorijo delca , kjer je višina nad tlemi (zaenkrat se bomo sprijaznili z eno dimenzijo; trajektorija naj teče le gor in dol, ne pa vstran), potem je kinetična energija bo , potencialna energija v poljubnem trenutku pa bo enaka .
Zdaj za trenutek gibanja po trajektoriji vzamem razliko med kinetično in potencialno energijo in integriram ves čas od začetka do konca. Naj se gibanje začne na določeni višini v začetnem trenutku časa in konča na drugi določeni višini.

Potem je integral enak
 .
.
Resnično gibanje poteka vzdolž določene krivulje (v odvisnosti od časa je parabola) in vodi do določene vrednosti integrala. Lahko pa si predstavljate kakšno drugo gibanje: najprej oster dvig, nato pa nekaj bizarnih nihanj.

Preverimo. Najprej poglejmo ta primer: prosti delec sploh nima potencialne energije. Potem pravilo pravi, da pri premikanju z ene točke na drugo v določen čas integral kinetične energije naj bo najmanjši. To pomeni, da se mora delec gibati enakomerno. (In to drži, ti in jaz veva, da je hitrost pri takem gibanju konstantna.) Zakaj enakomerno? Ugotovimo. Če bi bilo drugače, bi hitrost delca na trenutke presegla povprečje, na trenutke pa pod njo, povprečna hitrost pa bi bila enaka, ker bi moral delec priti »od tu do tu« v dogovorjeni čas. Na primer, če morate priti od doma v šolo z avtom v določen čas, potem lahko to storite na različne načine: sprva lahko vozite kot nori, nato pa na koncu upočasnite ali vozite z enako hitrostjo ali pa sprva celo na hrbtna stran, šele nato zavijte proti šoli itd. V vseh primerih mora biti povprečna hitrost seveda enaka - količnik razdalje od doma do šole deljeno s časom. Ampak tudi s tem Povprečna hitrost včasih si se premikal prehitro in včasih prepočasi. In povprečni kvadrat nečesa, kar odstopa od povprečja, je, kot je znano, vedno večji od kvadrata povprečja; To pomeni, da bo integral kinetične energije med nihanjem hitrosti gibanja vedno večji kot pri gibanju z konstantna hitrost. Vidite, da bo integral dosegel minimum, ko bo hitrost konstantna (ob odsotnosti sil). Pravi način tako pač je.

Predmet, vržen navzgor v gravitacijskem polju, se dvigne najprej hitro, nato pa vse počasneje. To se zgodi zato, ker ima tudi potencialno energijo, razlika med kinetično in potencialno energijo pa bi morala doseči najmanjšo vrednost. Ker se potencialna energija povečuje, ko se dvignete, bo razlika manjša, če čim hitreje dosežete tiste višine, kjer je potencialna energija visoka. Nato z odštevanjem tega visokega potenciala od kinetične energije dosežemo zmanjšanje povprečja. Zato je bolj donosno izbrati pot, ki gre navzgor in zagotavlja dober negativni del potencialne energije.

Toda po drugi strani se ne morete premikati prehitro ali iti previsoko, ker bi to zahtevalo preveč kinetične energije. Gibati se morate dovolj hitro, da se dvignete in spustite v času, ki vam je na voljo. Zato ne poskušajte leteti previsoko, ampak samo doseči neko razumno raven. Posledično se izkaže, da je rešitev nekakšno ravnovesje med željo pridobiti čim več potencialne energije in željo čim bolj zmanjšati količino kinetične energije - to je želja doseči največje zmanjšanje v razliki med kinetično in potencialno energijo.«
To je vse, kar mi je povedal učitelj, saj je bil zelo dober učitelj in vedel, kdaj je čas, da se ustavi. Sam, žal, nisem tak. Težko se pravočasno ustavim. In tako, namesto da bi samo vzbudil vaše zanimanje s svojo zgodbo, vas želim prestrašiti, želim vas spraviti pred kompleksnost življenja - poskušal bom dokazati, o čemer sem vam povedal. Matematični problem, ki ga bomo rešili, je zelo težak in edinstven. Obstaja določena količina, imenovana akcija. Je enaka kinetični energiji minus potencialna energija, integrirana skozi čas:
 .
.
Ne pozabite, da p.e. in k.e. - obe funkciji časa. Za vsako novo možno pot dobi to dejanje svoj poseben pomen. Matematični problem je ugotoviti, katera krivulja ima to število manjše od drugih.
Rekli boste: "Oh, enostavno je pogost primer na maksimum in minimum. Moramo izračunati akcijo, jo razlikovati in najti minimum.”
Ampak počakaj. Običajno imamo funkcijo neke spremenljivke in moramo najti vrednost spremenljivke, pri kateri funkcija postane najmanjša ali največja. Recimo, da je na sredini ogrevana palica. Po njej se širi toplota in na vsaki točki palice se vzpostavi lastna temperatura. Najti morate točko, kjer je najvišja. Ampak imamo govorimo o nekaj povsem drugega - vsaka pot v vesolju ima svojo številko, najti pa naj bi tisto pot, pri kateri je to število minimalno. To je popolnoma drugačno področje matematike. To ni navaden račun, ampak variacijski račun (kot se temu reče).
To področje matematike ima veliko svojih težav. Recimo, da je krog običajno opredeljen kot lokus točke, katerih razdalje od dane točke so enake, vendar je krog mogoče definirati drugače: to je ena od krivulj dane dolžine, ki omejuje največje območje. Katera koli druga krivulja istega obsega obsega površino, manjšo od kroga. Torej, če si postavite nalogo: poiščite krivuljo danem obodu, ki omejuje največje območje, potem bomo imeli problem zaradi variacijskega računa in ne zaradi računa, ki ste ga navajeni.
Torej želimo vzeti integral po poti, ki jo je prepotovalo telo. Naredimo to tako. Bistvo je v tem, da si predstavljamo, da obstaja prava pot in da katera koli druga krivulja, ki jo narišemo, ni prava pot, tako da, če izračunamo dejanje zanjo, bomo dobili številko, ki je višja od tiste, ki jo dobimo za dejanje, ki ustreza pravi način.

Torej, naloga je najti pravo pot. Kje leži? Eden od načinov bi seveda bil prešteti dejanje za milijone in milijone poti in nato videti, katera pot ima najmanjše delovanje. To je pot, na kateri je akcija minimalna in bo resnična.
Ta metoda je povsem možna. Vendar pa je to mogoče storiti preprosteje. Če obstaja količina, ki ima minimum (od običajnih funkcij, recimo temperatura), potem je ena od lastnosti minimuma ta, da ko se od njega oddalji za razdaljo prvega reda majhnosti, funkcija odstopa od svojega minimuma vrednost samo z vrednostjo drugega reda. In na katerem koli drugem mestu na krivulji premik za majhno razdaljo spremeni vrednost funkcije tudi za vrednost prvega reda majhnosti. Toda vsaj rahla stranska odstopanja v prvem približku ne povzročijo spremembe funkcije.

To lastnost bomo uporabili za izračun prave poti.
Če je pot pravilna, potem krivulja, ki se nekoliko razlikuje od nje, kot prvi približek ne bo vodila do spremembe velikosti dejanja. Vse spremembe, če je to res minimalno, se bodo pojavile šele v drugem približku.
To je enostavno dokazati. Če pri kakršnem koli odstopanju od krivulje pride do sprememb v prvem redu, potem so te spremembe v delovanju sorazmerne z odstopanjem. Verjetno bodo povečali učinek; sicer ne bi bil minimum. Ker pa so spremembe sorazmerne z odstopanjem, bo sprememba predznaka odstopanja zmanjšala delovanje. Izkazalo se je, da se pri odstopanju v eno smer učinek poveča, pri odstopanju v nasprotni smeri pa zmanjša. Edini način, da je to resnično minimalno, je, če v prvem približku ne pride do sprememb in so spremembe sorazmerne s kvadratom odstopanja od dejanske poti.
Torej, sledili bomo naslednji poti: skozi (s črto spodaj) bomo označili pravo pot - tisto, ki jo želimo najti. Vzemimo neko poskusno pot, ki se od želene razlikuje za majhno količino, kar označimo z .

Ideja je, da če izračunamo dejanje na poti, potem mora biti razlika med tem in dejanjem, ki smo ga izračunali za pot (zaradi poenostavitve bo označeno), ali razlika med in, v prvem približku, nič. V drugem redu se lahko razlikujejo, v prvem pa mora biti razlika nič.
In to je treba upoštevati za vsakogar. Vendar ne čisto za vsakogar. Metoda zahteva upoštevanje le tistih poti, ki se vse začnejo in končajo na istem paru točk, tj. vsaka pot se mora začeti na določeni točki v času in končati na drugi določeni točki v času. Te točke in trenutki so zabeleženi. Torej mora biti naša funkcija (odklon) na obeh koncih nič: in . Pod tem pogojem postane naš matematični problem popolnoma definiran.
Če niste poznali diferencialnega računa, bi lahko naredili isto stvar, da bi našli minimum navadne funkcije. Pomislili bi, kaj bi se zgodilo, če bi vzeli in dodali majhno vrednost k , in bi trdili, da mora biti popravek prvega reda enak najmanj nič. Namesto tega bi zamenjali in razširili na prvo stopnjo, z eno besedo, ponovili bi vse, kar nameravamo storiti z .
Torej, naša ideja je, da nadomestimo ![]() v formulo za ukrepanje
v formulo za ukrepanje
 ,
,
kjer je potencialna energija označena z. Izpeljanka je seveda izpeljanka plus izpeljanka , tako da za dejanje dobim ta izraz:
 .
.
Zdaj je treba to podrobneje opisati. Za kvadratni izraz, ki ga dobim
![]() .
.
Toda počakajte malo! Navsezadnje mi ni treba skrbeti za naročila, višja od prvega. Lahko odstranim vse izraze, ki vsebujejo in višje stopnje, in jih dajte v škatlo z imenom »drugo in višjih naročil" Iz tega izraza pride tja le ena druga stopnja, iz česa drugega pa lahko vstopijo tudi višji. Torej je del, povezan s kinetično energijo:
Nato potrebujemo potencial v točkah. Mislim, da je majhen in ga lahko razširim v Taylorjevo serijo. Približno bo; v naslednjem približku (zaradi dejstva, da so tu navadni derivati), je popravek enak , pomnožen s stopnjo spremembe glede na itd.:
![]() .
.
Da bi prihranil prostor, sem ga označil z izpeljanko glede na . Izraz c in vse, kar stoji za njim, spada v kategorijo »drugega in višjega reda«. In ni več treba skrbeti zanje. Združimo vse, kar ostane:
Če si zdaj to podrobneje ogledamo, bomo videli, da prva dva tukaj zapisana izraza ustrezata dejanju, ki bi ga napisal za želeno prava pot. Vašo pozornost želim usmeriti na spremembo, to je na razliko med in kaj bi se zgodilo za pravo pot. To razliko bomo zapisali kot in ji rekli variacija. Če zavržemo »drugi in višji red«, dobimo za
 .
.
Zdaj je naloga videti takole. Tukaj pred mano je neki integral. Ne vem še, kaj je to, vendar trdno vem, da ne glede na to, kaj vzamem, ta integral mora biti enako nič. "No," si lahko mislite, "edina možnost za to je, da je množitelj enak nič." Kaj pa prvi termin, kje je ? Rekli boste: »Če se spremeni v nič, potem je njegov derivat isti nič; To pomeni, da mora biti tudi koeficient pri enak nič.” No, to ni čisto res. To ne drži povsem, ker obstaja povezava med deviacijo in njenim derivatom; niso popolnoma neodvisni, ker mora biti nič pri in pri .
Pri reševanju vseh problemov variacijskega računa se vedno uporablja isti splošni princip. Rahlo premaknete, kar želite variirati (podobno kot smo naredili z dodajanjem ), pogledate člene prvega reda, nato vse uredite tako, da dobite integral v obliki: "premik krat, kar dobite", vendar tako, da ni vseboval nobenih izpeljank iz (katerega koli). Absolutno je treba vse preoblikovati tako, da ostane »nekaj«, pomnoženo z . Zdaj boste razumeli, zakaj je to tako pomembno. (Obstajajo formule, ki vam bodo povedale, kako lahko v nekaterih primerih to storite brez kakršnih koli izračunov; vendar niso tako splošne, da bi si jih bilo vredno zapomniti; najbolje je, da izračunate tako, kot delamo mi.)
Kako lahko predelam penis, da se pojavi v njem? To lahko dosežem z integracijo po delih. Izkazalo se je, da je v variacijskem računu celoten trik v tem, da zapišemo variacijo in nato integriramo po delih, tako da njihovi derivati izginejo. V vseh nalogah, v katerih se pojavljajo izpeljanke, se izvaja isti trik.
Spomnimo se splošnega načela integracije po delih. Če imate poljubno funkcijo, pomnoženo z in integrirano, potem zapišete izpeljanko:
![]() .
.
V integralu, ki vas zanima, je samo zadnji člen, torej
![]() .
.
V naši formuli za funkcijo velja, da je produkt ; tako da razumem izraz
Meje integracije in je treba nadomestiti v prvi izraz. Nato bom pod integral dobil člen iz integracije po delih in zadnji člen, ki med transformacijo ostane nespremenjen.
In zdaj se dogaja, kar se vedno zgodi – integrirani del izgine. (In če ne izgine, potem morate preoblikovati načelo in dodati pogoje, ki zagotavljajo takšno izginotje!) Rekli smo že, da mora biti na koncu poti enak nič. Konec koncev, kaj je naše načelo? Bistvo je, da je akcija minimalna, če se razgibana krivulja začne in konča na izbranih točkah. To pomeni, da in. Zato se izkaže, da je integrirani člen enak nič. Ostale člane zberemo skupaj in pišemo
 .
.
Različica je zdaj dobila obliko, ki smo ji jo želeli dati: nekaj je v oklepaju (označimo to ), vse to pa je pomnoženo z in integrirano od do .
Izkazalo se je, da je integral nekega izraza, pomnožen z, vedno enak nič:
![]() .
.
Obstaja nekaj funkcij iz ; Pomnožim in integriram od začetka do konca. In karkoli je, dobim nič. To pomeni, da je funkcija enaka nič. Na splošno je to očitno, a za vsak slučaj vam bom pokazal en način, kako to dokazati.
Naj izberem nekaj, kar je povsod enako nič, za vse razen ene vnaprej izbrane vrednosti. Ostaja na ničli, dokler ne pridem do njega, nato pa za trenutek poskoči in takoj pade nazaj. Če vzamete integral tega, pomnožen z neko funkcijo, potem boste edino, kjer boste dobili nekaj, kar ni nič, tam, kjer je skočilo; in na tem mestu boste dobili vrednost za integral čez skok. Integral preskoka sam po sebi ni nič, a če ga pomnožimo z njim, mora dati nič. To pomeni, da mora biti funkcija na mestu, kjer je bil skok, enaka nič. Toda preskok bi lahko bil narejen kjerkoli; kar pomeni, da mora biti povsod nič.

Vidimo, da če je naš integral enak nič za katero koli , mora koeficient pri postati nič. Akcijski integral doseže minimum na poti, ki bo zadovoljila tako kompleksno diferencialno enačbo:
 .
.
Pravzaprav ni tako zapleteno; ste ga že srečali. Preprosto je. Prvi člen je masa krat pospešek; drugi je odvod potencialne energije, torej sile.
Pokazali smo torej (vsaj za konservativni sistem), da načelo najmanjšega delovanja vodi do pravilnega odgovora; trdi, da je pot, ki ima minimalno delovanje, pot, ki zadošča Newtonovemu zakonu.
Treba je podati še eno pripombo. Nisem dokazal, da je to minimum. Mogoče je to maksimum. Pravzaprav ni nujno, da je to minimum. Tukaj je vse enako kot pri "načelu najkrajšega časa", o katerem smo govorili med študijem optike. Tudi tam smo najprej govorili o "najkrajšem" času. Izkazalo pa se je, da obstajajo situacije, v katerih ta čas ni nujno »najkrajši«. Temeljno načelo je, da za kakršna koli odstopanja prvega reda od optična pot spremembe v času bi bile nič; Tukaj je ista zgodba. Z "minimumom" dejansko mislimo, da bi morale biti do prvega reda majhnosti spremembe količine zaradi odstopanj od poti enake nič. In to ni nujno "minimum".
Zdaj bi rad prešel na nekaj posplošitev. Prvič, celotno zgodbo bi lahko naredili v treh dimenzijah. Namesto preprostega bi potem imel , oboje kot funkciji, dejanje pa bi bilo videti bolj zapleteno. Pri 3D-gibanju morate uporabiti skupno kinetično energijo: krat kvadrat celotne hitrosti. Z drugimi besedami,
 .
.
Poleg tega je potencialna energija zdaj funkcija , in . Kaj lahko rečete o poti? Pot je določena splošna krivulja v prostoru; ni tako enostavno risati, a ideja ostaja enaka. Kaj pa situacija? No, ima tri komponente. Pot se lahko premika po , in po , in po , ali v vse tri smeri hkrati. Torej je zdaj vektor. To ne povzroča večjih zapletov. Ker morajo biti samo variacije prvega reda enake nič, se lahko izračun izvede zaporedno s tremi izmeni. Prvič, lahko se premaknete samo v smeri in rečete, da mora biti koeficient enak nič. Dobiš eno enačbo. Potem se bomo premaknili v smeri in dobili drugega. Nato ga premaknemo v smer in dobimo tretjega. Vse lahko naredite, če želite, v drugačnem vrstnem redu. Kakor koli že, nastane trio enačb. Toda Newtonov zakon so tudi tri enačbe v treh dimenzijah, ena za vsako komponento. Sami se lahko prepričate, da vse to deluje v treh dimenzijah (tukaj ni veliko dela). Mimogrede, lahko vzamete kateri koli koordinatni sistem, polarni, kateri koli, in takoj dobite Newtonove zakone v zvezi s tem sistemom, glede na to, kaj se zgodi, ko pride do premika vzdolž polmera ali vzdolž kota itd.
Metodo lahko posplošimo na poljubno število delci. Če imate recimo dva delca in med njima delujejo sile in obstaja medsebojna potencialna energija, potem preprosto seštejete njuni kinetični energiji in od vsote odštejete potencialno energijo interakcije. Kaj variirate? Poti obeh delcev. Nato za dva delca, ki se gibljeta v treh dimenzijah, nastane šest enačb. Položaj delca 1 lahko spremenite v smeri , v smeri in v smeri , enako storite z delcem 2, tako da obstaja šest enačb. In tako mora biti. Tri enačbe določajo pospešek delca 1 zaradi sile, ki deluje nanj, ostale tri pa določajo pospešek delca 2 zaradi sile, ki deluje nanj. Vedno upoštevajte ista pravila igre in dobili boste Newtonov zakon za poljubno število delcev.
Rekel sem, da bomo dobili Newtonov zakon. To ne drži povsem, saj Newtonov zakon vključuje tudi nekonservativne sile, kot je trenje. Newton je trdil, da je enako vsakemu. Načelo najmanjšega delovanja velja samo za konservativne sisteme, tiste, kjer je mogoče dobiti vse sile potencialno funkcijo. A veste, da na mikroskopski ravni, torej na najgloblji fizični ravni, nekonservativne sile ne obstajajo. Nekonzervativne sile (kot je trenje) nastanejo samo zato, ker zanemarimo mikroskopske kompleksne učinke: delcev je preprosto preveč za analizo. Temeljne zakone lahko izrazimo v obliki načela najmanjšega delovanja.
Naj preidem na nadaljnje posploševanje. Recimo, da nas zanima, kaj se bo zgodilo, ko se bo delec gibal relativistično. Do sedaj še nismo dobili pravilne relativistične enačbe gibanja; velja le pri nerelativističnih gibanjih. Postavlja se vprašanje: ali v relativističnem primeru obstaja ustrezno načelo najmanjšega delovanja? Da, obstaja. Formula v relativističnem primeru je:
Prvi del integrala delovanja je produkt mase mirovanja in integrala funkcije hitrosti. Nato imamo namesto odštevanja potencialne energije integrale skalarnega potenciala in vektorskih potencialnih časov. Seveda so tukaj upoštevane samo elektromagnetne sile. Vsa električna in magnetna polja so izražena z in. Ta akcijska funkcija daje popolno teorijo relativističnega gibanja posamezni delec v elektromagnetnem polju.
Seveda morate razumeti, da kjer koli sem napisal , morate pred izračuni zamenjati itd. Poleg tega, kjer sem napisal preprosto , , , si morate trenutno predstavljati točke: , , . Pravzaprav boste šele po takih zamenjavah in zamenjavah dobili formulo za delovanje relativističnega delca. Naj najbolj vešči med vami poskusijo dokazati, da ta formula za akcijo dejansko daje pravilne enačbe gibanja za teorijo relativnosti. Naj vam le svetujem, da začnete z zavračanjem, torej zaenkrat brez magnetnih polj. Nato boste morali pridobiti komponente enačbe gibanja, kjer, kot se verjetno spomnite, ![]() .
.
Vključi v obravnavo vektorski potencial veliko težje. Variacije potem postanejo neprimerno bolj kompleksne. Toda na koncu se izkaže, da je sila enaka, kot bi morala biti: . Toda zabavajte se s tem tudi sami.
Rad bi poudaril, da v splošni primer(npr. v relativistični formuli) integral v delovanju ne vključuje več razlike med kinetično in potencialno energijo. To je bilo primerno le v nerelativističnem približku. Na primer član ![]() - to ni tisto, kar imenujemo kinetična energija. O vprašanju, kakšen naj bo ukrep za vsak posamezen primer, se je mogoče odločiti po nekaj poskusih in napakah. To je ista vrsta problema kot določanje, kakšne bi morale biti enačbe gibanja. Samo poigrati se morate z enačbami, ki jih poznate, in preveriti, ali jih je mogoče zapisati kot načelo najmanjšega delovanja.
- to ni tisto, kar imenujemo kinetična energija. O vprašanju, kakšen naj bo ukrep za vsak posamezen primer, se je mogoče odločiti po nekaj poskusih in napakah. To je ista vrsta problema kot določanje, kakšne bi morale biti enačbe gibanja. Samo poigrati se morate z enačbami, ki jih poznate, in preveriti, ali jih je mogoče zapisati kot načelo najmanjšega delovanja.
Še ena opomba glede terminologije. Funkcija, ki je integrirana skozi čas za pridobitev dejanja, se imenuje Lagrangian. To je funkcija, ki je odvisna le od hitrosti in položajev delcev. V obrazcu je torej zapisano tudi načelo najmanjšega delovanja
 ,
,
kjer in pomeni vse komponente koordinat in hitrosti. Če kdaj slišite nekoga govoriti o "Lagrangianu", govorijo o funkciji, uporabljeni za pridobitev . Za relativistično gibanje v elektromagnetnem polju
 .
.
Poleg tega moram opozoriti, da je najbolj natančen in pedantni ljudje se ne imenuje dejanje. Imenuje se "Hamiltonova prva glavna funkcija". Toda predavanje o "najmanjšem načelu" glavna funkcija Hamilton" je presegal moje moči. Poimenoval sem to "akcija". In poleg tega vse več ljudi temu reče »akcija«. Vidite, zgodovinsko se je dejanje imenovalo nekaj drugega, kar ni tako uporabno za znanost, vendar menim, da je bolj smiselno spremeniti definicijo. Zdaj boste tudi vi začeli poimenovati nova funkcija in kmalu jo bodo vsi začeli klicati s tem preprostim imenom.
Zdaj vam želim povedati nekaj o naši temi, kar je podobno razmišljanju, ki sem ga imel o načelu najkrajšega časa. Obstaja razlika v samem bistvu zakona, ki pravi, da ima neki integral, vzet iz ene točke v drugo, minimum – zakon, ki nam pove nekaj o celotni poti naenkrat, in zakon, ki pravi, da ko se premikate, , To pomeni, da obstaja sila, ki vodi do pospeška. Drugi pristop vam poroča o vsakem vašem koraku, sledi vaši poti palec za palcem, prvi pa takoj poda neko splošno izjavo o celotni prehojeni poti. Ko smo govorili o svetlobi, smo govorili o povezavi med tema dvema pristopoma. Zdaj vam želim pojasniti, zakaj bi morali obstajati diferencialni zakoni, če obstaja takšno načelo – načelo najmanjšega delovanja. Razlog je naslednji: razmislimo o dejansko prehojeni poti v prostoru in času. Kot doslej se bomo zadovoljili z eno meritvijo, da bomo lahko narisali graf odvisnosti od . Na pravi poti doseže minimum. Predpostavimo, da imamo to pot in da poteka skozi določeno točko v prostoru in času ter skozi drugo sosednjo točko.

Zdaj, če je celoten integral od do dosegel minimum, je nujno, da je minimalen tudi integral vzdolž majhnega odseka od do. Ne more biti, da bi del od do vsaj malo presegel minimum. V nasprotnem primeru lahko premikate krivuljo naprej in nazaj v tem delu in rahlo zmanjšate vrednost celotnega integrala.
To pomeni, da mora vsak del poti zagotoviti tudi minimum. In to velja za vse majhne dele poti. Zato lahko načelo, da mora celotna pot dati minimum, formuliramo tako, da rečemo, da je neskončno majhen segment poti tudi krivulja, na kateri je delovanje minimalno. In če vzamemo dokaj kratek odsek poti - med točkami in zelo blizu ena drugi - potem ni več pomembno, kako se potencial spreminja od točke do točke daleč od tega mesta, ker greste skozi celoten kratek odsek skoraj nikoli ne zapusti svojega mesta. Edina stvar, ki jo morate upoštevati, je sprememba potenciala v prvem redu. Odgovor je lahko odvisen samo od izpeljanke potenciala in ne od potenciala drugje. Tako izjava o lastnosti celotne poti kot celote postane izjava o tem, kaj se zgodi na kratkem odseku poti, to je diferencialna izjava. In ta diferencialna formulacija vključuje derivate potenciala, to je sile v dani točki. To je kvalitativna razlaga povezave med zakonom kot celoto in diferencialnim zakonom.
Ko smo govorili o svetlobi, smo se pogovarjali tudi o vprašanju: kako delec najde pravo pot? Z diferencialna točka To je enostavno razumeti z vidika. V vsakem trenutku delec doživi pospešek in ve le, kaj naj bi v tistem trenutku naredil. Toda vsi vaši instinkti vzroka in posledice se vzbudijo, ko slišite, da se delec »odloči«, katero pot naj ubere, in si prizadeva za čim manj dejanj. Ali ne "voha" sosednjih poti in ugotavlja, do česa bodo pripeljale - do večje ali manjše akcije? Ko smo na pot svetlobe postavili zaslon, da fotoni ne morejo preizkusiti vseh poti, smo ugotovili, da se ne morejo odločiti, katero pot naj uberejo, in dobili smo pojav uklona.
Toda ali to velja tudi za mehanike? Ali je res, da delec ne samo »gre po pravi poti«, ampak ponovno pretehta vse druge možne trajektorije? In kaj, če mu s postavljanjem ovir na poti ne dovolimo, da bi gledal naprej, potem bomo dobili nekakšen analog pojava uklona? Najbolj čudovito pri vsem tem pa je, da je res vse tako. Točno to pravijo zakoni kvantne mehanike. Torej naše načelo najmanjšega delovanja ni v celoti oblikovano. Ne gre za to, da delec izbere pot najmanjšega delovanja, ampak za to, da »začuti« vse sosednje poti in izbere tisto, po kateri je delovanje minimalno, metoda te izbire pa je podobna način izbire svetlobe najkrajši čas. Spomnite se, da svetloba izbere najkrajši čas tako: če gre svetloba po poti, ki zahteva drugačen čas, bo prispela z drugačno fazo. In skupna amplituda na neki točki je vsota prispevkov amplitude za vse poti, po katerih jo svetloba lahko doseže. Vse tiste poti, katerih faze se močno razlikujejo, po seštevanju ne prinesejo ničesar. Če pa vam je uspelo najti celotno zaporedje poti, katerih faze so skoraj enake, se bodo majhni prispevki sešteli in na točki prihoda bo skupna amplituda dobila opazno vrednost. Na najpomembnejši način postane tista, blizu katere je veliko bližnjih poti, ki dajejo isto fazo.
Popolnoma isto se dogaja v kvantni mehaniki. Popolna kvantna mehanika (nerelativistična in zanemarja vrtenje elektrona) deluje takole: verjetnost, da bo delec, ki zapusti točko 1 ob času , dosegel točko 2 ob času , je enaka kvadratu amplitude verjetnosti. Skupno amplitudo lahko zapišemo kot vsoto amplitud za vse možne načine- za katero koli pot prihoda. Za katero koli , ki bi se lahko pojavila za katero koli možno namišljeno trajektorijo, je treba izračunati amplitudo. Potem jih je treba vse zložiti. Kaj vzamemo kot amplitudo verjetnosti določene poti? Naš akcijski integral nam pove, kakšna naj bo amplituda posamezne poti. Amplituda je sorazmerna z , kjer je delovanje na tej poti. To pomeni, da če fazo amplitude predstavimo v obliki kompleksno število, potem bo fazni kot enak . Delovanje ima razsežnost energije skozi čas in Planckova konstanta ima enako razsežnost. To je konstanta, ki določa, kdaj je potrebna kvantna mehanika.
In tako vse skupaj deluje. Naj bo dejanje zelo veliko za vse poti v primerjavi s številom . Naj neka pot vodi do določene vrednosti amplitude. Faza bližnje poti se bo izkazala za popolnoma drugačno, saj pri veliki tudi manjše spremembe močno spremenijo fazo (navsezadnje je izjemno majhna). To pomeni, da sosednje poti običajno ugasnejo svoje prispevke, ko so dodane. In samo na enem področju to ne drži - na tistem, kjer imata tako pot kot njen sosed - oba v prvem približku enako fazo (ali natančneje skoraj enako delovanje, ki se spreminja znotraj ). Samo takšne poti se upoštevajo. In v omejevalnem primeru, ko gre Planckova konstanta na nič, lahko pravilne zakone kvantne mehanike povzamemo z besedami: »Pozabite na vse te verjetnostne amplitude. Delec se dejansko giblje poseben način- natanko po katerem se v prvem približku ne spremeni.” To je povezava med načelom najmanjšega delovanja in kvantno mehaniko. Dejstvo, da je kvantno mehaniko mogoče formulirati na ta način, je leta 1942 odkril učenec istega učitelja, gospod Bader, o katerem sem vam govoril. [Kvantna mehanika je bila prvotno oblikovana z uporabo diferencialna enačba za amplitudo (Schrödinger) in tudi z uporabo nekaj matrične matematike (Heisenberg).]
Zdaj želim govoriti o drugih principih minimuma v fiziki. Obstaja veliko zanimivih tovrstnih načel. Ne bom našteval vseh, navedel bom samo še enega. Pozneje, ko pridemo do enega fizikalnega pojava, za katerega obstaja odlično minimalno načelo, vam bom povedal o njem. Zdaj želim pokazati, da elektrostatike ni treba opisati z diferencialno enačbo za polje; namesto tega lahko zahtevamo, da ima neki integral maksimum ali minimum. Za začetek vzemimo primer, ko je gostota naboja znana povsod, vendar moramo najti potencial na kateri koli točki v prostoru. Že veste, da bi moral biti odgovor:
Drug način, da rečemo isto stvar, je ovrednotenje integrala
![]() ;
;
to je volumenski integral. Prenese se po celotnem prostoru. S pravilno porazdelitvijo potenciala ta izraz doseže minimum.
Lahko pokažemo, da sta obe trditvi glede elektrostatike enakovredni. Predpostavimo, da smo izbrali poljubno funkcijo. Želimo pokazati, da ko vzamemo pravilno vrednost potenciala plus majhen odklon kot kakovost, bo sprememba v prvem redu majhnosti enaka nič. Torej pišemo
tukaj je tisto, kar iščemo; vendar bomo variirali, da vidimo, kakšna bi morala biti, da bi bila variacija prvega reda majhnosti. V prvem terminu moramo pisati
Edini izraz prvega naročila, ki se bo spremenil, je:
V drugem členu bo integrand dobil obliko
spreminjajoči se del tukaj je . Če pustimo samo spreminjajoče se člene, dobimo integral
![]() .
.
To je treba znova in znova integrirati. In tukaj se pokaže isti trik: da se znebimo , integriramo po delih. To bo povzročilo dodatno razlikovanje glede na. To je ista osnovna ideja, ki smo jo uporabili, da smo se znebili izpeljank glede na . Uporabljamo enakost
![]() .
.
Integrirani člen je enak nič, saj menimo, da je enak nič v neskončnosti. (To ustreza izničevanju pri in . Torej je naše načelo natančneje formulirano takole: za pravilnega je manj kot za katerega koli drugega, ki ima enake vrednosti v neskončnosti.) Potem bomo storili enako z in z . Naš integral se spremeni v
![]() .
.
Da bi bila ta variacija enaka nič za katero koli poljubno , mora biti koeficient pri enak nič. pomeni,
Spet smo pri naši stari enačbi. To pomeni, da je naš predlog "minimum" pravilen. Posplošimo ga lahko, če izračune nekoliko spremenimo. Vrnimo se nazaj in integrirajmo po delih, vendar opišemo vse komponente po komponentah. Začnimo z zapisom naslednje enakosti:
Z razlikovanjem leve strani lahko pokažem, da je popolnoma enaka desni. Ta enačba je primerna za izvajanje integracije po delih. V našem integralu nadomestimo z ![]() in ga nato integrirajte čez volumen. Divergenčni člen po integraciji po prostornini nadomestimo z integralom po površini:
in ga nato integrirajte čez volumen. Divergenčni člen po integraciji po prostornini nadomestimo z integralom po površini:
In ker integriramo po celotnem prostoru, leži površina v tem integralu v neskončnosti. To pomeni in dobimo enak rezultat.
Šele zdaj začenjamo razumeti, kako rešiti probleme, pri katerih ne vemo, kje so vsi naboji. Imejmo prevodnike, na katerih se naboji nekako porazdelijo. Če so potenciali na vseh vodnikih nespremenljivi, je še vedno dovoljeno uporabljati naše minimalno načelo. Integracijo bomo izvajali samo nad regijo, ki leži izven vseh vodnikov. Ker pa se ne moremo spreminjati na vodnikih, potem na njihovi površini in površinskem integralu
je tudi nič. Integracija preostale količine
![]()
je treba opraviti samo v prostorih med vodniki. In seveda spet dobimo Poissonovo enačbo
Zato smo pokazali, da naš začetni integral doseže minimum, tudi če je izračunan v prostoru med vodniki, od katerih je vsak pri fiksnem potencialu [to pomeni, da mora biti vsaka testna funkcija enaka danemu potencialu prevodnika, ko - točke na površini prevodnika ].
Obstaja zanimiva poseben primer, ko se naboji nahajajo samo na vodnikih. Potem
![]()
in naše minimalno načelo nam pove, da so v primeru, ko ima vsak vodnik svoj vnaprej določen potencial, potenciali v prostorih med njimi prilagojeni tako, da je integral čim manjši. Kakšen integral je to? Član je električno polje. To pomeni, da je integral elektrostatična energija. Pravilno polje je edino, ki ima izmed vseh polj, dobljenih kot potencialni gradient, najmanjšo skupno energijo.
Ta rezultat bi rad uporabil za rešitev določenega problema in vam pokazal, da imajo vse te stvari resničen praktični pomen. Recimo, da vzamem dva prevodnika v obliki cilindričnega kondenzatorja.

Potencial notranjega vodnika je recimo , potencial zunanjega vodnika pa nič. Naj bo polmer notranjega vodnika enak , zunanjega vodnika pa - . Zdaj lahko domnevamo, da je porazdelitev potencialov med njimi poljubna. Če pa vzamemo pravilno vrednost in izračunamo ![]() , potem mora biti energija sistema . Torej lahko z uporabo našega principa izračunate tudi zmogljivost. Če vzamemo napačno porazdelitev potenciala in poskušamo oceniti kapacitivnost kondenzatorja s to metodo, bomo na koncu dobili preveč velikega pomena zmogljivost pri fiksni . Vsak ocenjeni potencial, ki se ne ujema natančno z njegovo resnično vrednostjo, bo vodil tudi do nepravilne vrednosti, ki je višja od potrebne. Toda če je nepravilno izbrani potencial še vedno grob približek, bo kapacitivnost pridobljena z dobro natančnostjo, ker je napaka v količina drugega reda v primerjavi z napako v.
, potem mora biti energija sistema . Torej lahko z uporabo našega principa izračunate tudi zmogljivost. Če vzamemo napačno porazdelitev potenciala in poskušamo oceniti kapacitivnost kondenzatorja s to metodo, bomo na koncu dobili preveč velikega pomena zmogljivost pri fiksni . Vsak ocenjeni potencial, ki se ne ujema natančno z njegovo resnično vrednostjo, bo vodil tudi do nepravilne vrednosti, ki je višja od potrebne. Toda če je nepravilno izbrani potencial še vedno grob približek, bo kapacitivnost pridobljena z dobro natančnostjo, ker je napaka v količina drugega reda v primerjavi z napako v.
Predpostavimo, da ne poznam kapacitivnosti cilindričnega kondenzatorja. Potem, da jo prepoznam, lahko uporabim ta princip. Preprosto bom preizkusil različne funkcije kot potencialne, dokler ne dosežem najnižje vrednosti. Recimo, da sem na primer izbral potencial, ki ustreza konstantnemu polju. (Seveda veste, da polje tukaj dejansko ni konstantno; spreminja se kot .) Če je polje konstantno, potem to pomeni, da je potencial linearno odvisen od razdalje. Da bi bila napetost na vodnikih takšna, kot je zahtevana, mora funkcija imeti obliko
Tudi ko (in to že vodi do precej velikih razlik med konstantnim in linearnim poljem), še vedno dobim dokaj sprejemljiv približek. Odgovor je seveda pričakovano malce previsok. Če pa je tanka žica nameščena v velik valj, potem je vse videti veliko slabše. Nato se polje zelo močno spremeni in ga nadomesti konstantno polje ne vodi v nič dobrega. Ko skoraj dvakrat precenimo odgovor. Pri majhnih je situacija veliko boljša. V nasprotni meji, ko reža med vodniki ni zelo široka (recimo pri ), se konstantno polje izkaže za zelo dober približek, saj daje vrednost natančno na desetinke odstotka.
Zdaj vam bom povedal, kako izboljšati ta izračun. (Seveda poznate odgovor za valj, vendar ista metoda deluje za nekatere druge nenavadne oblike kondenzatorjev, za katere morda ne poznate pravilnega odgovora.) Naslednji korak je najti boljši približek resničnemu potencialu, ki ga delamo. ne vem. Recimo, da lahko preizkusite konstanto in eksponent itd. Kako pa veste, da imate najboljši približek, če ne poznate pravega? Odgovor: Izračunaj ; nižje kot je, bližje resnici. Preizkusimo to idejo. Naj potencial ni linearen, ampak, recimo, kvadraten v , in električno polje ni konstantno, ampak linearno. Najbolj pogost kvadratna oblika, ki se obrača na. Prišel bom do svojega minimuma. Obračanje k običajnemu diferencialni račun, skrbim za minimalno
Izkaže se, da je odgovor 1,1 10,492065 namesto pričakovanega 10,492070. Kjer bi pričakovali dober odgovor, se izkaže za zelo, zelo dobrega.
Vse te primere sem navedel, prvič, da pokažem teoretično vrednost načela minimalnega delovanja in nasploh vseh principov minimuma, in drugič, da vam pokažem njihovo praktično uporabnost, in sploh ne zato, da bi izračunal zmogljivost ki jih že imamo zelo dobro vemo. Za katero koli drugo obliko lahko poskusite s približnim poljem z nekaj neznanimi parametri (na primer ) in jih prilagodite na minimum. Prejeli boste odlično številčni rezultati pri težavah, ki jih ni mogoče rešiti na noben drug način.
V družini je najpomembnejše načelo najmanjšega ukrepanja; je ena ključnih določb sodobne fizike.
Prva formulacija principa je bila dana (P. Maupertuis (Francoz)) leta 1744. Od tu je izpeljal zakone odboja in loma svetlobe.
Načelo najmanjšega delovanja v klasični mehaniki
Najprej se spomnimo, na primeru fizičnega sistema z enim , da tukaj govorimo o , to je o pravilu, ki vsaki funkciji x(t) pripiše določeno število. Akcija izgleda takole: S[x] = \int \mathcal(L)(x(t),\dot(x)(t),t) dt, Kje \mathcal(L)(x(t),\dot(x)(t),t) obstajajo sistemi, ki so odvisni od trajektorije (tj. koordinat, ki so nato odvisne od časa), njene prve v času in so lahko tudi eksplicitno odvisne od .
Akcija je lahko izračunana za povsem poljubno trajektorijo, ne glede na to, kako »divje« in »nenaravno« je. Vendar pa je med celotnim naborom možnih trajektorij le ena, po kateri bo telo dejansko šlo. Načelo najmanjšega delovanja natančno odgovarja na vprašanje, kako se bo telo dejansko gibalo:
telo se premakne, da zmanjša delovanje.To pomeni, da če je Lagrangian sistema podan, potem lahko z njim ugotovimo, kako natančno se bo telo gibalo.
Upoštevajte, da če je iz pogojev problema načeloma mogoče najti zakon gibanja, potem to samodejno pomeni, da je mogoče konstruirati funkcional, ki ima ekstremno vrednost za pravo gibanje.
Na kratko smo si ogledali enega najbolj izjemnih fizikalna načela- načelo najmanjšega delovanja in se odločil za primer, za katerega se je zdelo, da mu je v nasprotju. V tem članku si bomo to načelo ogledali nekoliko podrobneje in videli, kaj se zgodi v v tem primeru.
Tokrat bomo potrebovali malo več matematike. Vendar bom ponovno poskušal predstaviti glavni del članka v osnovna raven. Nekoliko bolj strog in težki trenutki Označil jih bom barvno; lahko jih preskočite, ne da bi ogrozili osnovno razumevanje članka.
Mejni pogoji
Začeli bomo z najpreprostejšim predmetom - žogico, ki se prosto giblje v prostoru in na katero ne deluje nobena sila. Takšna krogla se, kot je znano, giblje enakomerno in premočrtno. Za poenostavitev predpostavimo, da se premika vzdolž osi

Za natančen opis njegovega gibanja so praviloma določeni začetni pogoji. Na primer, določeno je, da v začetnem trenutku časa
žoga je bila pri točki
s koordinato
in imel hitrost
Ko določimo začetne pogoje v tej obliki, enolično določimo nadaljnje gibanježoga - premikala se bo s konstantno hitrostjo in njen položaj v trenutku
bo enaka začetnemu položaju plus hitrost, pomnožena s pretečenim časom:
Ta način nastavitve začetni pogoji zelo naravno in intuitivno. Določili smo vse potrebne informacije o gibanju žoge v začetnem trenutku, nato pa njeno gibanje določajo Newtonovi zakoni.
Vendar to ni edina pot določanje gibanja žoge. Druga možnost je nastavitev položaja žogice ob dveh različnih časih
Tisti. vprašaj tole:
1) v trenutku
žoga je bila pri točki
(s koordinat
);
2) v trenutku
žoga je bila pri točki
(s koordinat
Izraz "je bil na točki"
"ne pomeni, da je žoga na točki mirovala
V nekem trenutku
lahko bi letel skozi točko
To pomeni, da je njegov položaj v trenutku
sovpadal s točko
Enako velja za točko
Ta dva pogoja tudi enolično določata gibanje žoge. Njegovo gibanje je enostavno izračunati. Za izpolnitev obeh pogojev mora biti hitrost žoge očitno enaka
Položaj žoge v trenutku
bo ponovno enaka začetnemu položaju plus hitrost, pomnožena s pretečenim časom:
Upoštevajte, da nam v nalogi ni bilo treba določiti pogojev začetna hitrost. Enolično je določeno iz pogojev 1) in 2).
Nastavitev pogojev na drugi način je videti nenavadna. Morda ni jasno, zakaj jih je sploh treba vprašati v tej obliki. Pri načelu najmanjšega delovanja pa se uporabljajo pogoji v obliki 1) in 2) in ne v obliki naloge. začetni položaj in začetno hitrostjo.
Pot z najmanj dejanji.
Zdaj pa se malo odmaknimo od realnosti prosto gibanježogo in razmislite o naslednjem čisto matematičnem problemu. Recimo, da imamo žogo, ki jo lahko ročno premikamo poljubno. V tem primeru moramo izpolnjevati pogoja 1) in 2). Tisti. v času med
premakniti ga moramo s točke
To je mogoče storiti v celoti različne poti. Vsako tako metodo bomo imenovali trajektorija gibanja žogice in jo lahko opišemo s funkcijo položaja žogice v odvisnosti od časa
Narišimo več teh trajektorij na graf položaja žoge v odvisnosti od časa:

Na primer, lahko premikamo žogo z enako hitrostjo, ki je enaka
(zelena pot). Ali pa ga lahko držimo na mestu polovico časa
Nato se premaknite do točke z dvojno hitrostjo
(modra pot). Najprej ga lahko premaknete v nasprotno smer
stran in jo nato premaknite na
(rjava pot). Lahko ga premikate naprej in nazaj (rdeča pot). Na splošno ga lahko premikate, kakor želite, če sta izpolnjena pogoja 1) in 2).
Vsaki taki trajektoriji lahko pripišemo številko. V našem primeru, tj. v odsotnosti kakršnih koli sil, ki delujejo na žogo, je to število enako skupni akumulirani kinetični energiji za ves čas njenega gibanja v času med
in se imenuje akcija.
IN v tem primeru Beseda "akumulirana" kinetična energija ne izraža natančno pomena. V resnici se kinetična energija ne akumulira nikjer; akumulacija se uporablja samo za izračun delovanja za tirnico. V matematiki obstaja zelo dober koncept za takšno kopičenje - integral:
Dejanje je običajno označeno s črko
pomeni kinetično energijo. Ta integral pomeni, da je delovanje enako akumulirani kinetični energiji žoge v časovnem obdobju od
Za primer vzemimo kroglo z maso 1 kg, postavimo robne pogoje in izračunamo delovanje za dve različni trajektoriji. Naj bistvo
je na razdalji 1 metra od točke
oddaljena od časa
za 1 sekundo. Tisti. premakniti moramo žogo, ki je bila v začetnem trenutku na točki
V eni sekundi na razdalji 1 m vzdolž osi
V prvem primeru (zelena tirnica) smo žogo premikali enakomerno, tj. pri enaki hitrosti, ki bi očitno morala biti enaka:
gospa. Kinetična energija žoge v vsakem trenutku je enaka:
1/2 J. V eni sekundi se bo nabralo 1/2 J
s kinetično energijo. Tisti. dejanje za takšno trajektorijo je enako:
Zdaj pa ne premaknimo žogice takoj s točke
In zadržimo ga na točki pol sekunde
In potem, v preostalem času, ga bomo enakomerno premaknili do točke
V prvi polovici sekunde žogica miruje in je njena kinetična energija enaka nič. Zato je tudi prispevek k delovanju tega dela trajektorije enak nič. V drugi polovici sekunde premaknemo žogo z dvojno hitrostjo:
gospa. Kinetična energija bo enaka
2 J. Prispevek tega časovnega obdobja k dejanju bo enak 2 J krat pol sekunde, tj. 1 J
z. Zato splošno dejanje za takšno trajektorijo se izkaže, da je
Podobno vsaka druga trajektorija z robnimi pogoji 1) in 2), ki smo jih podali, ustreza določenemu številu, ki je enako dejanju za to trajektorijo. Med vsemi takimi trajektorijami obstaja tirnica, ki ima najmanj delovanja. Lahko se dokaže, da je ta tirnica zelena tirnica, tj. enakomerno gibanje žoge. Za katero koli drugo pot, ne glede na to, kako zapletena je, bo akcija večja od 1/2.
V matematiki takšna preslikava za vsako funkcijo določeno število imenovan funkcionalni. Pogosto se v fiziki in matematiki pojavljajo problemi, podobni našim, tj. najti funkcijo, za katero je vrednost določenega funkcionala minimalna. Na primer, ena od nalog, ki je imela veliko zgodovinski pomen za razvoj matematike je naloga o bachistochrone. Tisti. iskanje krivulje, po kateri se žoga najhitreje kotali. Spet lahko vsako krivuljo predstavimo s funkcijo h(x) in vsaki funkciji lahko pridružimo številko, v tem primeru čas kotaljenja krogle. Spet se problem zmanjša na iskanje funkcije, za katero je vrednost funkcionala minimalna. Veja matematike, ki se ukvarja s tovrstnimi problemi, se imenuje variacijski račun.
Načelo najmanjšega delovanja.
V zgoraj obravnavanih primerih imamo dve posebni trajektoriji, pridobljeni na dva različna načina.
Prva trajektorija je pridobljena iz zakonov fizike in ustreza realni trajektoriji proste žoge, na katero ne delujejo sile in za katero so robni pogoji podani v obliki 1) in 2).
Druga trajektorija je pridobljena iz matematični problem iskanje trajektorije z danimi robnimi pogoji 1) in 2), za katere je delovanje minimalno.
Načelo najmanjšega delovanja pravi, da morata ti dve poti sovpadati. Z drugimi besedami, če je znano, da se je žogica gibala tako, da sta bila izpolnjena robna pogoja 1) in 2), potem se je nujno gibala po trajektoriji, za katero je delovanje minimalno v primerjavi s katero koli drugo trajektorijo z isto mejo. pogoji.
Lahko bi rekli, da je to zgolj naključje. Obstaja veliko problemov, pri katerih se pojavljajo enakomerne trajektorije in ravne črte. Vendar se načelo najmanjšega delovanja izkaže za zelo splošno načelo, ki velja v drugih situacijah, na primer za gibanje žoge v enotnem gravitacijskem polju. Če želite to narediti, morate samo nadomestiti kinetično energijo z razliko med kinetično in potencialno energijo. Ta razlika se imenuje Lagrangian ali Lagrangiana funkcija in dejanje zdaj postane enako celotnemu akumuliranemu Lagrangianu. Pravzaprav Lagrangeova funkcija vsebuje vse potrebne informacije o dinamičnih lastnostih sistema.
Če izstrelimo kroglo v enakomernem gravitacijskem polju tako, da preleti točko
v določenem trenutku
in prispel na točko
v določenem trenutku
Nato bo po Newtonovih zakonih letel v paraboli. Ta parabola bo sovpadala s trajektorijami, za katere bo delovanje minimalno.
Tako je za telo, ki se giblje v potencialnem polju, na primer v gravitacijskem polju Zemlje, Lagrangeova funkcija enaka:
Kinetična energija
je odvisen od hitrosti telesa, potencial pa od njegove lege, tj. koordinate
IN analitična mehanika celoten niz koordinat, ki določajo položaj sistema, je običajno označen z eno črko
Za žogico, ki se prosto giblje v gravitacijskem polju,
pomeni koordinate
Da bi označili hitrost spremembe katere koli količine, v fiziki zelo pogosto nad to količino preprosto postavijo piko. na primer
označuje hitrost spreminjanja koordinat
Ali z drugimi besedami, hitrost telesa v smeri
Z uporabo teh konvencij je hitrost naše žoge v analitični mehaniki označena kot
pomeni komponente hitrosti
Ker je Lagrangeova funkcija odvisna od hitrosti in koordinat, lahko pa je tudi eksplicitno odvisna od časa (eksplicitno odvisna od časa pomeni, da je vrednost
v različnih trenutkih časa, pri enakih hitrostih in položajih žoge), potem je dejanje na splošno zapisano kot
Ne vedno minimalno
Vendar smo si na koncu prejšnjega dela ogledali primer, kjer načelo najmanjšega delovanja očitno ne deluje. Za to smo ponovno vzeli prosto žogico, na katero ne deluje nobena sila, in zraven postavili vzmetno steno.
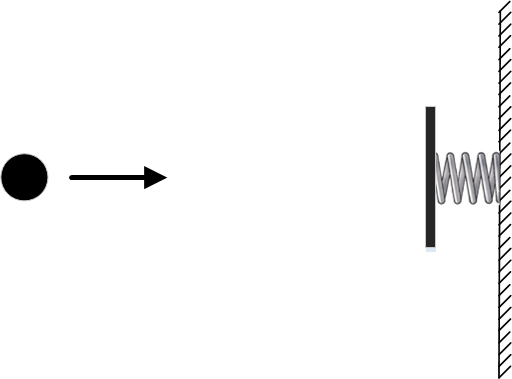
Robne pogoje postavimo tako, da točke
ujemati se. Tisti. in trenutno
in trenutno
žoga mora končati na isti točki
Ena od možnih poti bo žogica, ki miruje. Tisti. celotno obdobje med
stal bo na mestu
Kinetična in potencialna energija bosta v tem primeru enaki nič, zato bo tudi delovanje za takšno trajektorijo enako nič.
Strogo gledano lahko potencialno energijo vzamemo enako ne nič, ampak poljubnemu številu, saj je razlika v potencialni energiji v različne točke prostora. Vendar sprememba vrednosti potencialne energije ne vpliva na iskanje trajektorije z minimalnim delovanjem. Za vse trajektorije se bo vrednost dejanja spremenila na isto število, tir z najmanjšim dejanjem pa bo ostal trajektorija z najmanjšim dejanjem. Za udobje bomo za našo žogo izbrali potencialno energijo enako nič.
Druga možna fizična tirnica z enakimi mejnimi pogoji bi bila tirnica, pri kateri žogica najprej leti v desno in mimo točke
v določenem trenutku
Nato trči ob vzmet, jo stisne, vzmet, ki se zravna, potisne žogo nazaj in ta spet odleti mimo točke.
Izberete lahko hitrost žoge, tako da se odbije od stene in preide točko
pravočasno
Delovanje na takšni trajektoriji bo v bistvu enako akumulirani kinetični energiji med letom med točko
in steno in nazaj. Prišlo bo nekaj časa, ko bo krogla stisnila vzmet in se bo njena potencialna energija povečala, v tem času pa bo potencialna energija negativno prispevala k delovanju. Toda takšno obdobje ne bo zelo dolgo in ne bo bistveno zmanjšalo učinka. 
Slika prikazuje obe fizikalno možni trajektoriji gibanja žogice. Zelena tirnica ustreza žogi v mirovanju, medtem ko modra tirnica ustreza žogi, ki se odbija od vzmetne stene.
Vendar le eden od njih ima minimalen učinek, in sicer prvi! Druga pot ima več akcije. Izkazalo se je, da sta v tem problemu dve fizično možni trajektoriji in samo ena z minimalnim delovanjem. Tisti. V tem primeru načelo najmanjšega delovanja ne deluje.
Stacionarne točke.
Da bi razumeli, kaj se tukaj dogaja, za zdaj zanemarimo načelo najmanjšega delovanja in preidimo na običajne funkcije. Vzemimo nekaj funkcij
in narišite njegov graf:

Označil sem na grafu zelenaštiri posebne točke. Kaj imajo te točke skupnega? Predstavljajmo si, da je graf funkcije pravi tobogan, po katerem se lahko kotali žoga. Štiri določene točke so posebne v tem, da če žogo postavite točno na to točko, se ne bo odkotalila nikamor. Na vseh drugih točkah, na primer v točki E, ne bo mogel stati pri miru in bo začel drseti navzdol. Takšne točke imenujemo stacionarne. Iskanje takih točk je koristno opravilo, saj mora biti vsak maksimum ali minimum funkcije, če nima ostrih prekinitev, nujno stacionarna točka.
Če te točke natančneje razvrstimo, potem je točka A absolutni minimum funkcije, tj. njena vrednost je manjša od vrednosti katere koli druge funkcije. Točka B ni niti maksimum niti minimum in se imenuje sedlo. Točka C se imenuje lokalni maksimum, tj. vrednost v njej je večja kot v sosednjih točkah funkcije. In točka D - lokalni minimum, tj. vrednost v njej je manjša kot v sosednjih točkah funkcije.
Iskanje takih točk izvaja veja matematike, imenovana matematična analiza. V nasprotnem primeru jo včasih imenujemo infinitezimalna analiza, saj lahko deluje z neskončno majhnimi količinami. Z vidika matematična analiza stacionarne točke imajo eno posebno lastnost, zahvaljujoč kateri jih najdemo. Da bi razumeli, kakšna je ta lastnost, moramo razumeti, kako izgleda funkcija na zelo majhnih razdaljah od teh točk. Da bi to naredili, bomo vzeli mikroskop in skozi njega pogledali naše točke. Slika prikazuje, kako izgleda funkcija v bližini različnih točk pri različnih povečavah.

Vidimo lahko, da pri zelo veliki povečavi (tj. pri zelo majhnih odstopanjih x) stacionarne točke izgledajo popolnoma enako in se zelo razlikujejo od nestacionarne točke. Preprosto je razumeti, kakšna je ta razlika - graf funkcije na stacionarni točki postane strogo vodoravna črta, ko se poveča, na nestacionarni točki pa postane nagnjena črta. Zato se krogla, nameščena na stacionarni točki, ne bo kotalila navzdol.
Horizontalnost funkcije v stacionarni točki lahko izrazimo drugače: funkcija v stacionarni točki se praktično ne spremeni z zelo majhno spremembo njenega argumenta.
Tudi v primerjavi s samo spremembo argumenta. Funkcija v nestacionarni točki z majhno spremembo
spreminja sorazmerno s spremembo
In večji kot je naklon funkcije, bolj se funkcija spremeni pri spreminjanju
Pravzaprav, ko funkcija narašča, postaja vse bolj podobna tangenti na graf v zadevni točki.
Na strogem matematični jezik izraz »funkcija se v točki praktično ne spremeni
z zelo malo spremembami
« pomeni razmerje med spreminjanjem funkcije in spreminjanjem njenega argumenta
se nagiba k 0, ko
teži k 0:
$$display$$lim_(∆x do 0) frac (∆y(x_0))(∆x) = lim_(x do 0) frac (y(x_0+∆x)-y(x_0))(∆x) = 0$$prikaz$$
Za nestacionarno točko se to razmerje nagiba k neničelnemu številu, ki je enako tangensu naklona funkcije v tej točki. To isto število imenujemo odvod funkcije v dani točki. Odvod funkcije kaže, kako hitro se funkcija spreminja okoli dane točke, ko majhna sprememba njen argument
Stacionarne točke so torej točke, v katerih je odvod funkcije enak 0.
Stacionarne trajektorije.
Po analogiji s stacionarnimi točkami lahko uvedemo koncept stacionarnih trajektorij. Spomnimo se, da vsaka trajektorija ustreza določeni akcijski vrednosti, tj. neko število. Potem lahko obstaja takšna trajektorija, da se za trajektorije blizu nje z enakimi mejnimi pogoji ustrezne akcijske vrednosti praktično ne bodo razlikovale od akcije za samo stacionarno trajektorijo. Takšna trajektorija se imenuje stacionarna. Z drugimi besedami, vsaka tirnica, ki je blizu stacionarne, bo imela akcijsko vrednost, ki se zelo malo razlikuje od akcije za to stacionarno tirnico.
Še enkrat, v matematičnem jeziku ima "nekoliko drugačen" naslednje natančen pomen. Predpostavimo, da imamo dano funkcionalnost
za funkcije z zahtevanimi robnimi pogoji 1) in 2), tj.
Predpostavimo, da trajektorija
– stacionarni.
Lahko prevzamemo katero koli drugo funkcijo
Takšna, da na koncih zavzame ničelne vrednosti, tj.
0. Vzemimo še spremenljivko
Kar bomo počeli vedno manj. Od teh dveh funkcij in spremenljivke
lahko sestavimo še tretjo funkcijo
Ki bo tudi zadostil robnim pogojem
Pri zmanjševanju
pot, ustrezno funkcijo
Vse bližje bo poti
Poleg tega za stacionarne trajektorije pri majhnih
vrednost funkcionala za trajektorije
se bo zelo malo razlikovala od vrednosti funkcionalne za
celo v primerjavi z
$$display$$lim_(ε do 0) frac (S(x"(t))-S(x(t)))ε=lim_(ε do 0) frac (S(x(t)+εg(t) ))-S(x(t)))ε = 0$$prikaz$$
Poleg tega bi to moralo veljati za katero koli pot
Zadovoljevanje robnih pogojev
Spremembo funkcionala z majhno spremembo funkcije (natančneje, linearni del spremembe funkcionala, sorazmeren s spremembo funkcije) imenujemo variacija funkcionala in jo označimo
Izraz "variacijski račun" izhaja iz izraza "variacija".
Za stacionarne trajektorije, variacija funkcionala
Metodo za iskanje stacionarnih funkcij (ne le za načelo najmanjšega delovanja, ampak tudi za številne druge probleme) sta našla dva matematika - Euler in Lagrange. Izkaže se, da mora stacionarna funkcija, katere funkcional je izražen z integralom, podobnim akcijskemu integralu, izpolnjevati določeno enačbo, ki se zdaj imenuje Euler-Lagrangeova enačba.
Načelo stacionarnega delovanja.
Situacija z minimalnim delovanjem za trajektorije je podobna situaciji z minimumom za funkcije. Da bi imela tirnica najmanjši učinek, mora biti tirnica mirujoča. Vendar niso vse stacionarne trajektorije minimalne akcijske trajektorije. Na primer, stacionarna tirnica ima lahko minimalen lokalni učinek. Tisti. njegovo delovanje bo manjše od delovanja katere koli druge sosednje trajektorije. Vendar pa nekje daleč lahko obstajajo druge trajektorije, za katere bo akcija še manjša.
Izkazalo se je, da se resnična telesa morda ne premikajo po trajektorijah z najmanjšim delovanjem. Lahko se gibljejo po širšem naboru posebnih trajektorij, in sicer po stacionarnih trajektorijah. Tisti. realna tirnica telesa bo vedno mirovala. Zato je pravilneje načelo najmanjšega delovanja imenovati načelo stacionarnega delovanja. Vendar se po ustaljeni tradiciji pogosto imenuje načelo najmanjšega delovanja, kar pomeni ne le minimalnost, ampak tudi stacionarnost trajektorij.
Zdaj lahko zapišemo princip stacionarnega delovanja v matematičnem jeziku, kot je običajno zapisano v učbenikih:
To so posplošene koordinate, tj. niz številk, ki enolično določa položaj sistema.
Stopnje spreminjanja generaliziranih koordinat.
Lagrangeova funkcija, ki je odvisna od posplošenih koordinat, njihovih hitrosti in morda časa.
Dejanje, ki je odvisno od specifične trajektorije sistema (tj.
Realne trajektorije sistema so stacionarne, tj. zanje različica akcije
Če se vrnemo k primeru s kroglico in elastično steno, potem postane razlaga te situacije zelo preprosta. Za dano robni pogoji da naj bi žogo in med
in med
bodite na mestu
obstajata dve stacionarni trajektoriji. In žoga se lahko dejansko premika po kateri koli od teh poti. Če želite eksplicitno izbrati eno od poti, se lahko prijavite dodatni pogoj. Na primer, recite, da se mora žoga odbiti od stene. Potem bo pot nedvoumno določena.
Nekaj izjemnih posledic izhaja iz načela najmanjšega (natančneje stacionarnega) delovanja, o katerem bomo govorili v naslednjem delu.







