આ વિભાગમાં આપણે રેખીય નિષ્પક્ષ અલ્ગોરિધમના એક અલગ સ્વરૂપને ધ્યાનમાં લઈશું જે લઘુત્તમ સરેરાશ ચોરસ ભૂલ પ્રદાન કરે છે, એમ ધારી રહ્યા છીએ કે સંદેશ મોડેલ રેખીય વેક્ટર તફાવત સમીકરણ દ્વારા આપવામાં આવ્યું છે.
જ્યાં ઇનપુટ નોઈઝ (અથવા ઓબ્જેક્ટ નોઈઝ) એ શૂન્ય સરેરાશ અને સહપ્રવાહ મેટ્રિક્સ સાથેનો સફેદ અવાજ છે
અવલોકન અથવા માપન મોડેલ રેખીય બીજગણિત સંબંધ દ્વારા આપવામાં આવે છે
. (7.3)
જ્યાં માપન અવાજ v એ શૂન્ય-મીન સફેદ અવાજ છે અને
. (7.4)
પ્રારંભિક ગણતરીઓની સરળતા ખાતર, અમે ધારીએ છીએ કે અને અસંબંધિત છે, એટલે કે.
દરેક માટે, (7.5)
બીજ એક અવ્યવસ્થિત ચલનું પ્રતિનિધિત્વ કરે છે જેમાં સરેરાશ અને ભિન્નતા હોય છે, બીજા શબ્દોમાં
![]() ;
; ![]() . (7.6)
. (7.6)
અમે દરેક માટે તે પણ ધારીશું.
ચાલો સળંગ અવલોકનોના સમૂહના આધારે મૂલ્યનો અંદાજ શોધીએ. ચાલો આ અંદાજને , અને અનુમાનની ભૂલ દ્વારા દર્શાવીએ
જથ્થાઓ વચ્ચેના સંબંધ પર આધાર રાખીને, અનુમાનને અનુમાન અથવા એક્સ્ટ્રાપોલેશન, ફિલ્ટરિંગ અથવા સ્મૂથિંગ અને અંતે પ્રક્ષેપ કહેવામાં આવે છે. આવા વિભાજન સાહજિક રીતે સમજી શકાય તેવું છે, કારણ કે, ઉદાહરણ તરીકે, આગાહીનો અર્થ છે આકારણી માં રાજ્યક્ષણ, મી ક્ષણ સુધીના તમામ અવલોકનો પર આધારિત. આ પ્રકરણ મુખ્યત્વે ફિલ્ટરિંગ સમસ્યા પર ધ્યાન કેન્દ્રિત કરશે, જ્યારે અનુમાન અને પ્રક્ષેપણની શોધ આગામી પ્રકરણમાં કરવામાં આવશે.
અંદાજ શરતી અને બિનશરતી નિરપેક્ષ હશે, એટલે કે અને , અને અવલોકનોના ક્રમનું એક રેખીય કાર્ય પણ હશે. સંભવિત રેખીય નિષ્પક્ષ અનુમાન અલ્ગોરિધમ્સના સમૂહમાંથી, અમે ફક્ત તે જ પસંદ કરીએ છીએ જે ન્યૂનતમ ભૂલ તફાવત આપે છે, એટલે કે, જેના માટે અથવા ![]() ન્યૂનતમ
ન્યૂનતમ
IN અગાઉનો પ્રકરણઅમે સ્થાપિત કર્યું છે કે લઘુત્તમ સરેરાશ ચોરસ ભૂલના માપદંડ પર આધારિત અંદાજ આપેલ અવલોકનોના સમૂહ માટે જથ્થાના શરતી સરેરાશ મૂલ્ય સાથે એકરુપ છે. જો કે, સામાન્ય રીતે, રિપોર્ટિંગ અને અવલોકન મોડેલો રેખીય હોવા છતાં (અને અહીં જે સમસ્યાની રચના કરવામાં આવી છે તે માટે તે છે), શરતી સરેરાશ એ અવલોકનોનું રેખીય કાર્ય નથી, અને તેથી અંદાજ અલ્ગોરિધમમાં રેખીયતાની ઇચ્છિત મિલકત હોતી નથી. .
મેળવવા માટે રેખીય અલ્ગોરિધમઅંદાજ કે જે ન્યૂનતમ ભૂલ ભિન્નતાને સુનિશ્ચિત કરે છે, આપણે બેમાંથી એક અભિગમનો ઉપયોગ કરવો જોઈએ. એક રેખીય આકારનું પ્રતિનિધિત્વ કરતી શરતી સરેરાશ નક્કી કરવી અને પછી શોધવી શ્રેષ્ઠ વિકલ્પઆ ફોર્મ. આ અભિગમ ઉપયોગ પર આધારિત છે ઓર્થોગોનલ પ્રક્ષેપણ. અન્ય અભિગમ એ ધારણા પર આધારિત છે કે રેન્ડમ ચલો, અને એકસાથે સામાન્ય છે. પ્રકરણમાં જે સાબિત થયું હતું તેના આધારે. રેખીય સિસ્ટમોના 4 ગુણધર્મો બદલી શકાતા નથી સામાન્ય કાયદોવિતરણ, આ કિસ્સામાં ચોક્કસ શરતી સરેરાશ હશે રેખીય સ્વરૂપ. રેખીય મૂલ્યાંકનજો બાદમાં ખરેખર રેખીય હોય તો લઘુત્તમ ભિન્નતા અંદાજ લઘુત્તમ ભિન્નતા અંદાજની બરાબર હોવો જોઈએ. જો આપણે સામાન્ય વિતરણ કાયદાઓ ધારીએ તો આવું થાય છે.
નોંધ કરો કે જો અમને અનુમાન અલ્ગોરિધમ રેખીય હોવું જરૂરી છે, તો વાસ્તવિક વિતરણ કાયદો , અને વાંધો નથી. જો કે, જો વિતરણો ખરેખર સામાન્ય હોય, જેમ કે તે ઘણી વખત હોય છે, તો શરતી સરેરાશ અસરકારક રીતે એક રેખીય સ્વરૂપ છે. બીજા શબ્દોમાં કહીએ તો, કાલમેન ફિલ્ટર શ્રેષ્ઠ (ન્યૂનતમ ભૂલ તફાવતના અર્થમાં) રેખીય ફિલ્ટર છે, વિતરણના પ્રકારને ધ્યાનમાં લીધા વિના, અને તમામ સંભવિત રેખીય અને બિનરેખીય અંદાજ અલ્ગોરિધમનો શ્રેષ્ઠ અલ્ગોરિધમ છે જો ઑબ્જેક્ટ અને માપન અવાજ, તેમજ પ્રારંભિક સ્થિતિ તરીકે, સામાન્ય વિતરણ કાયદા છે.
કાલમેન ફિલ્ટર માટે સમીકરણ મેળવતી વખતે, અમે ધારીશું અને અવલોકનો ક્રમિક રીતે પ્રક્રિયા કરવામાં આવે તે જરૂરી છે. અનુમાનિત અલ્ગોરિધમ અનુક્રમિક છે કે નહીં, પરિણામી રાજ્ય અંદાજોના મૂલ્યોને સમાયોજિત કરવામાં આવતાં નથી. જો કે, પદ્ધતિની કોમ્પ્યુટેશનલ શક્યતા જરૂરી છે. કદાચ કાલમેન અને બ્યુસીનું સૌથી નોંધપાત્ર યોગદાન એ છે કે તેઓ રાજ્ય ચલોની વિભાવનાનો ઉપયોગ કરીને ક્રમિક સ્વરૂપમાં રેખીય લઘુત્તમ ભિન્નતા અંદાજ અલ્ગોરિધમ મેળવનારા પ્રથમ હતા. ન્યૂનતમ ભૂલ ભિન્નતાના માપદંડ પર આધારિત રેખીય અનુક્રમિક ફિલ્ટરિંગની સમસ્યા લાંબા સમય પહેલા વિનર અને અન્ય લેખકો દ્વારા એક ઇનપુટ અને એક આઉટપુટ સાથેની સિસ્ટમોના સંબંધમાં હલ કરવામાં આવી હતી. કાલમેનની મુખ્ય યોગ્યતા એ છે કે તેણે વિનરની ફિલ્ટરેશન થિયરીને નોનસ્ટેશનરી મલ્ટિ-ડાયમેન્શનલ સિસ્ટમ્સના કિસ્સામાં મર્યાદિત અવધિના નોનસ્ટેશનરી અવાજ અમલીકરણ સાથે સામાન્યીકરણ કર્યું અને રિકરન્ટ સ્વરૂપમાં ફિલ્ટરેશન સમસ્યાનો ઉકેલ મેળવ્યો.
સમસ્યાના સારની રજૂઆતમાં થોડો વિલંબ થયો હોવાથી, આપણે તેનો સીધો ઉકેલ લાવવાનું શરૂ કરીએ તે પહેલાં, ચાલો સારાંશ આપીએ. અમે રેખીય બિન-સ્થિરની સ્થિતિનો શ્રેષ્ઠ રેખીય નિષ્પક્ષ અંદાજ મેળવવા માંગીએ છીએ ગતિશીલ સિસ્ટમ, જે શૂન્ય સરેરાશ અને જાણીતા ભિન્નતા સાથે સફેદ અવાજને આધીન છે.
અંદાજ મેળવવા માટે, અમે એડિટિવની પૃષ્ઠભૂમિ સામે સમય-વિવિધ રેખીય સ્થિતિ કાર્યનું અવલોકન કરીએ છીએ સફેદ અવાજશૂન્ય સરેરાશ અને જાણીતા તફાવત સાથે. પ્રક્રિયાની પ્રારંભિક સ્થિતિ જાણીતી સરેરાશ અને ભિન્નતા સાથેનું રેન્ડમ ચલ છે. ઇનપુટ ઘોંઘાટ અને માપન અવાજ વચ્ચે કોઈ સંબંધ નથી, અને રિકરન્ટ સ્વરૂપમાં અનુમાન અલ્ગોરિધમ શોધવું જરૂરી છે. Kalman ફિલ્ટરિંગ અલ્ગોરિધમ આ સમસ્યાનો ઉકેલ છે. અલગ પ્રણાલીઓના સંબંધમાં, અમે કાલમેન ફિલ્ટર સમીકરણ મેળવવા માટેના બે જુદા જુદા અભિગમોને ધ્યાનમાં લઈએ છીએ, જે ઉપર દર્શાવેલ બે વિચારોનું ઉદાહરણ છે. પ્રથમ કિસ્સામાં, જ્યારે ઓર્થોગોનલ પ્રોજેક્શન અભિગમનો ઉપયોગ કરવામાં આવે છે, ત્યારે અમે અગાઉથી અંદાજ અલ્ગોરિધમનું રેખીય સ્વરૂપ પસંદ કરીશું અને પછી શ્રેષ્ઠ અલ્ગોરિધમ શોધીશું. બીજા કિસ્સામાં, જ્યારે અનુમાન મહત્તમ પશ્ચાદવર્તી સંભાવના અનુસાર હાથ ધરવામાં આવે છે, ત્યારે અમે ધારીશું કે રેન્ડમ ચલોમાં સામાન્ય વિતરણ કાયદા છે અને શ્રેષ્ઠ અંદાજ અલ્ગોરિધમ શોધીશું, જે ખરેખર રેખીય હશે. ફિલ્ટરેશન સમીકરણ મેળવતી વખતે, કાલમેને ઓર્થોગોનલ પ્રોજેક્શન પદ્ધતિ પર આધારિત અભિગમનો ઉપયોગ કર્યો, તેથી અમે આ પદ્ધતિથી પ્રસ્તુતિ શરૂ કરીશું.
ઓર્થોગોનલપ્રક્ષેપણ§ 6.6 માં ઓર્થોગોનલ પ્રક્ષેપણના સિદ્ધાંતની ટૂંકમાં ચર્ચા કરવામાં આવી હતી. ત્યાં પ્રસ્તુત પરિણામોના કેટલાક સામાન્યીકરણો અહીં પુરાવા વિના રજૂ કરવામાં આવશે; અમને પછીથી તેમની જરૂર પડશે. આપેલ માટે લઘુત્તમ ભૂલ તફાવતના માપદંડ પર આધારિત મૂલ્યનો રેખીય અંદાજ રેખીય જગ્યાઅવલોકનો પર ઓર્થોગોનલ પ્રોજેક્શન દ્વારા આપવામાં આવે છે, એટલે કે.
અહીં ચિહ્નને બદલે વપરાયેલ છે, કારણ કે ન્યૂનતમ વિસંગતતા સાથેનો રેખીય અંદાજ સામાન્ય રીતે શરતી ગાણિતિક અપેક્ષા સાથે મેળ ખાતો નથી. જો આપણે અગાઉથી ધારી લીધું હોય કે રેન્ડમ ચલોમાં સામાન્ય વિતરણો હોય છે, તો તે ફક્ત ; જો કે, અમે ઇરાદાપૂર્વક એ વાત પર ભાર મૂકવા માટે એક અલગ અભિગમ પસંદ કર્યો છે કે સામાન્ય વિતરણની ધારણા જરૂરી નથી, જો આપણે યાદ રાખીએ કે પરિણામી અંદાજ અલ્ગોરિધમ ચોક્કસ શ્રેષ્ઠ ન હોઈ શકે, પરંતુ રેખીય અલ્ગોરિધમ્સના વર્ગમાં માત્ર શ્રેષ્ઠ છે. જો ઓર્થોગોનલ સિક્વન્સ માટે આધાર બનાવે છે, તો તેને નીચે પ્રમાણે રજૂ કરી શકાય છે
 . (7.8)
. (7.8)
આવર્તક સ્વરૂપમાં ઉકેલ મેળવવા માટે, અમને નીચેના પરિણામની જરૂર છે. જો વેક્ટર ઓર્થોગોનલ છે, એટલે કે. , માટે , તો પછી માટે ઓર્થોગોનલ આધાર ક્યાં છે
આ પરિણામ ઓર્થોગોનલ પ્રોજેક્શન લેમ્મા છે. જો કે અમને ફિલ્ટરિંગમાં રસ હશે, એટલે કે, ચાલો પહેલા એક-પગલાની આગાહીને ધ્યાનમાં લઈએ, એટલે કે. આવશ્યક પુનરાવર્તિત સ્વરૂપમાં ઉકેલ મેળવવા માટે, અમે ગાણિતિક ઇન્ડક્શનના સિદ્ધાંતનો ઉપયોગ કરીએ છીએ. ચાલો ધારીએ કે તે જાણીતું છે અને તેના દ્વારા નવા અવલોકનની કલ્પના કરીએ. જો કે, સામાન્ય રીતે કહીએ તો, તે ઓર્થોગોનલ નથી, અને સમીકરણ (7.9) નો ઉપયોગ કરતા પહેલા, ઓર્થોગોનલ છે તે અવલોકન ઘટક શોધવાનું જરૂરી છે. આવશ્યકપણે, આ હાઇલાઇટિંગ માટે નીચે આવે છે નવી માહિતીમાં સમાયેલ છે.
તે બતાવવાનું સરળ છે કે વેક્ટર
ઓર્થોગોનલ તેમાં સમાવિષ્ટ "નવી માહિતી" શું છે તેની નોંધ કરો, કારણ કે આપેલ પ્રમાણનો શ્રેષ્ઠ અંદાજ મેળવવા માટે, એટલે કે ![]() , માંથી બાદ કરવામાં આવે છે. આ નિવેદનનું બીજું સ્વરૂપ છે જે ઓર્થોગોનલ છે. રેન્ડમ ચલને "અપડેટિંગ" ચલ તરીકે ઓળખવામાં આવે છે. સમીકરણ (7.10) નો ઉપયોગ કરીને, અમે તેને રેન્ડમ વેરીએબલ અપડેટ કરવાના સંદર્ભમાં નીચે પ્રમાણે વ્યક્ત કરી શકીએ છીએ:
, માંથી બાદ કરવામાં આવે છે. આ નિવેદનનું બીજું સ્વરૂપ છે જે ઓર્થોગોનલ છે. રેન્ડમ ચલને "અપડેટિંગ" ચલ તરીકે ઓળખવામાં આવે છે. સમીકરણ (7.10) નો ઉપયોગ કરીને, અમે તેને રેન્ડમ વેરીએબલ અપડેટ કરવાના સંદર્ભમાં નીચે પ્રમાણે વ્યક્ત કરી શકીએ છીએ:
.
આ બે અભિવ્યક્તિઓ ત્યારથી સમાન છે ![]() અવલોકન જગ્યામાં સમાયેલ છે અને તેથી તેમાં સમાવિષ્ટ માહિતીની તુલનામાં કોઈપણ વધારાની માહિતી ઉમેરતી નથી. અને તે ઓર્થોગોનલ હોવાથી, આપણે સમીકરણ (7.9) નો ઉપયોગ કરી શકીએ છીએ અને તેને લખી શકીએ છીએ. ત્યારથી, આ અભિવ્યક્તિને નીચેના સ્વરૂપમાં રજૂ કરી શકાય છે:
અવલોકન જગ્યામાં સમાયેલ છે અને તેથી તેમાં સમાવિષ્ટ માહિતીની તુલનામાં કોઈપણ વધારાની માહિતી ઉમેરતી નથી. અને તે ઓર્થોગોનલ હોવાથી, આપણે સમીકરણ (7.9) નો ઉપયોગ કરી શકીએ છીએ અને તેને લખી શકીએ છીએ. ત્યારથી, આ અભિવ્યક્તિને નીચેના સ્વરૂપમાં રજૂ કરી શકાય છે:
તે અનુસરે છે કે તે અગાઉના અવલોકનોમાંથી રેન્ડમ ચલના મૂલ્યની આગાહી કરીને અને પછી રેન્ડમ ચલના વર્તમાન નમૂનાના મૂલ્યમાં સમાવિષ્ટ નવી માહિતી અનુસાર અનુમાનિત મૂલ્યને સમાયોજિત કરીને મેળવવામાં આવે છે. આગાહી અને કરેક્શનની વિભાવના ખૂબ જ ફળદાયી છે અને કાલમેન અલ્ગોરિધમના સ્પષ્ટ અર્થઘટન માટે પરવાનગી આપે છે. તેથી, ફિલ્ટરિંગ એલ્ગોરિધમ મેળવતી વખતે, અમે આગાહી અને સુધારણાના વિચાર પર આધારિત અભિગમનો ઉપયોગ કરીશું. ચાલો સમીકરણ (7.11) ની જમણી બાજુએ દરેક બે શબ્દોનું અલગ-અલગ વિશ્લેષણ કરીએ. અભિવ્યક્તિ અનુસાર (7.1) તરીકે આપવામાં આવે છે. તેથી, જે વ્યાખ્યા દ્વારા સમાન છે ![]() , હવે સમાન બને છે
, હવે સમાન બને છે
વ્યાખ્યા મુજબ, અમારી પાસે પણ છે
કારણ કે તે ફક્ત સફેદ ઘોંઘાટ માટે અને તેના પર આધાર રાખે છે, આપેલ મૂલ્ય માટેના મૂલ્યની ગાણિતિક અપેક્ષા ફક્ત બિનશરતી ગાણિતિક અપેક્ષા સાથે મેળ ખાય છે. તેથી ઉપરોક્ત પરિણામ નીચેનામાં રૂપાંતરિત થાય છે:
આપણે જોઈએ છીએ કે નું અનુમાનિત મૂલ્ય, ના અવલોકન પર આધારિત છે, એક ડગલું આગળ, એટલે કે, પર . આ નિષ્કર્ષ અનપેક્ષિત નથી કારણ કે અવલોકન પર આધારિત શ્રેષ્ઠ અંદાજ, ઉપર બતાવ્યા પ્રમાણે, શૂન્ય સમાન છે. તે આના પરથી પણ અનુસરે છે
આનો અર્થ એ છે કે ફિલ્ટરિંગ અને અનુમાન બંનેમાં, શૂન્ય સરેરાશ સાથે સફેદ અવાજનો શ્રેષ્ઠ અંદાજ સમાન રીતે શૂન્ય છે. આ નિષ્કર્ષ અત્યંત મહત્વપૂર્ણ છે અને ખૂબ જ ઉપયોગી થશે, ખાસ કરીને જ્યારે "અપડેટિંગ" પ્રક્રિયાના ખ્યાલની ચર્ચા કરવામાં આવે ત્યારે. નીચે આપણે એ જ રીતે બતાવીશું કે શું તરીકે વ્યાખ્યાયિત કરવામાં આવે છે અને ખરેખર શું છે
જો આપણે સમીકરણ (7.12) ને (7.11) માં બદલીએ, તો આપણને મળે છે
ચાલો આ સમીકરણની જમણી બાજુના બીજા પદને ધ્યાનમાં લઈએ. સમીકરણનો ઉપયોગ કરીને (7.8), ![]() નીચેના ફોર્મમાં લખી શકાય છે:
નીચેના ફોર્મમાં લખી શકાય છે:
હવે આપણે આ સમીકરણની જમણી બાજુએ દરેક પદને અલગથી તપાસીએ છીએ. માટે (7.1) અવેજીમાં, આપણે સમીકરણની પ્રથમ અવધિ માટે મેળવીએ છીએ
હવે, જથ્થાઓની વ્યાખ્યાનો ઉપયોગ કરીને અને [જુઓ સમીકરણો (7.3) અને (7.10)] નીચેના સ્વરૂપમાં લખી શકાય છે:
ક્યાં. તેથી, સમીકરણ (7.17) સ્વરૂપ લે છે
અને અનુરૂપ શબ્દોનો ગુણાકાર કર્યા પછી તે ફોર્મમાં પરિવર્તિત થાય છે
કારણ કે તે ફક્ત , અને , a પર આધાર રાખે છે અને પછી સહસંબંધિત નથી ![]() . કારણ કે તે સફેદ ઘોંઘાટ છે, અને માત્ર પછી પર આધાર રાખે છે
. કારણ કે તે સફેદ ઘોંઘાટ છે, અને માત્ર પછી પર આધાર રાખે છે ![]() અને ઉપરના સમીકરણની જમણી બાજુએ ત્રીજી પદ હોવી જોઈએ શૂન્ય બરાબર. સમીકરણની જમણી બાજુનું છેલ્લું પદ પણ શૂન્ય છે, કારણ કે અને સહસંબંધિત નથી. તેથી, ફક્ત પ્રથમ પદ બાકી છે અને પરિણામે અમારી પાસે છે
અને ઉપરના સમીકરણની જમણી બાજુએ ત્રીજી પદ હોવી જોઈએ શૂન્ય બરાબર. સમીકરણની જમણી બાજુનું છેલ્લું પદ પણ શૂન્ય છે, કારણ કે અને સહસંબંધિત નથી. તેથી, ફક્ત પ્રથમ પદ બાકી છે અને પરિણામે અમારી પાસે છે
જો આપણે તેને ધ્યાનમાં લઈએ તો પરિણામી અભિવ્યક્તિને વધુ સરળ બનાવી શકાય છે. તે જ સમયે ![]() સમાન બને છે
સમાન બને છે

પરંતુ ઓર્થોગોનલ પ્રોજેક્શન લેમ્મા અનુસાર પ્રથમ પદ શૂન્ય બરાબર છે. તેથી, સમીકરણ (7.18) આ રીતે લખી શકાય છે:
જ્યાં એ જ રીતે, તે બતાવી શકાય છે
જો આપણે સમીકરણો (7.19), (7.20) અને (7.10) ને (7.16) માં બદલીએ, તો
તેથી, માટે અભિવ્યક્તિ સ્વરૂપ લે છે
આ પરિણામ નોટેશન રજૂ કરીને વધુ અનુકૂળ સ્વરૂપમાં રજૂ કરી શકાય છે
તેથી આપણે આખરે મેળવીએ છીએ
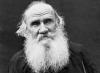
જથ્થાને વન-સ્ટેપ કાલમેન એક્સ્ટ્રાપોલેટરનો લાભ કહેવામાં આવે છે. સમીકરણો (7.23) અને (7.24) દ્વારા રજૂ કરાયેલ ઉકેલનું સ્વરૂપ ગણતરીના દૃષ્ટિકોણથી ખૂબ જ રસપ્રદ અને અનુકૂળ છે. અમે પાછલા પગલામાં ગણતરી કરેલ જાણીતી કિંમત અને નવા અવલોકન પર આધારિત ક્રમિક ગણતરી અલ્ગોરિધમ મેળવ્યું છે. જૂના અંદાજના એક્સ્ટ્રાપોલેશનના પરિણામે અહીં નવો અંદાજ રચાયો છે અને વેઇટેડ ઓબ્ઝર્વેશન એરર સિગ્નલનો ઉપયોગ કરીને કાલમેન એક્સ્ટ્રાપોલેટરની બ્લોક ડાયાગ્રામ ફિગમાં બતાવવામાં આવી છે. 7.1b; સરખામણી માટે, મૂળ રિપોર્ટિંગ અને અવલોકન મોડલ ફિગમાં બતાવવામાં આવ્યા છે. 7.1, એ. ઉપર મેળવેલ પરિણામનો ઉપયોગ કરતા પહેલા, તમારે ગણતરી કરવા માટે સૌપ્રથમ અભિવ્યક્તિ શોધવી આવશ્યક છે. તમે તેને અલગ રીતે કરી શકો છો અને શોધી શકો છો. નિર્ધારિત કરવા માટે, આપણે પ્રથમ માટે આવર્તક અભિવ્યક્તિ શોધીએ છીએ. સમીકરણો (7.1) અને (7.24) ને જોડીને, આપણે મેળવીએ છીએ

આકૃતિ 7.1. એક-પગલાની આગાહી સમસ્યાના બ્લોક ડાયાગ્રામ: a) સંદેશ અને અવલોકન મોડેલ્સ, b) એક-પગલાની આગાહી ઉપકરણ
જો આપણે હવે અભિવ્યક્તિ (7.3) ને બદલીએ અને સરળ શ્રેણીબદ્ધ કરીએ બીજગણિત પરિવર્તન, પછી ઉપરોક્ત અભિવ્યક્તિ ફોર્મમાં ઘટાડો થાય છે
એ હકીકત ઉપરાંત કે સમીકરણ (7.25) નો ઉપયોગ ગણતરીમાં થઈ શકે છે, તે અનુમાનની ભૂલમાં ફેરફારના નિયમ તરીકે સ્વતંત્ર હિતનું પણ છે.
જથ્થાનું સરેરાશ મૂલ્ય શૂન્ય હોવાથી (કારણ કે અંદાજ નિષ્પક્ષ છે), અને જથ્થાઓ , અને સહસંબંધિત નથી, આ જથ્થા અને સમીકરણ (7.25) ની વ્યાખ્યાના આધારે, માટે અભિવ્યક્તિ સીધી મેળવી શકાય છે, ફોર્મમાં
જો આપણે હવે મેળવેલ પરિણામ માટે (7.23) ને બદલીએ છીએ અને તેને સરળ બનાવીએ છીએ, તો અમે ભૂલના તફાવત માટે નીચેની અભિવ્યક્તિ મેળવીએ છીએ:
સમીકરણ (7.26) સાથે મળીને (7.23) અને (7.24) ન્યૂનતમ ભૂલ તફાવત સાથે રેખીય અનુક્રમિક વન-સ્ટેપ એક્સ્ટ્રાપોલેટરને સંપૂર્ણપણે વ્યાખ્યાયિત કરે છે.
ઉપર પ્રાપ્ત પરિણામનો ઉપયોગ કરતા પહેલા, અને માટેના સમીકરણોમાં યોગ્ય પ્રારંભિક શરતો સેટ કરવી જરૂરી છે. તે સ્પષ્ટ છે કે શ્રેષ્ઠ અંદાજજથ્થા પૂરી પાડવામાં આવેલ છે કે કોઈ અવલોકનો કરવામાં આવ્યા નથી અને તેથી
તેથી, એક-પગલાની આગાહી અલ્ગોરિધમ્સની પ્રારંભિક શરતો તરીકે, અમે પસંદ કરીએ છીએ ![]() ;
; ![]() .
.
તમામ એક-પગલાની આગાહી અલ્ગોરિધમ્સ કોષ્ટકમાં સારાંશ આપેલ છે. 7.1.
સમીકરણ (7.26) પણ નીચે પ્રમાણે ફરીથી લખી શકાય છે:
જો તમે સમીકરણો (7.24) અને (7.26) માં પ્રારંભિક શરતો સેટ કરો છો, તો તમે અનુક્રમે એક-પગલાની આગાહી અલ્ગોરિધમનો ઉપયોગ કરી શકો છો. ઉદાહરણ તરીકે, પ્રારંભિક સ્થિતિ સાથેનું સમીકરણ (7.23) શોધવા માટે વાપરી શકાય છે, જે પછી પ્રથમ અવલોકનમાંથી ગણતરી કરવા માટે (7.24) માં બદલવું આવશ્યક છે. જ્યારે વિક્ષેપ સમીકરણ (7.26) માં રૂપાંતરિત થાય ત્યારે આગલા તબક્કે વપરાય છે. પછી જથ્થાના પ્રાપ્ત મૂલ્યનો ઉપયોગ ગણતરી વગેરે માટે થાય છે. આગાહીના સમીકરણો અનુસાર ડેટા પ્રોસેસિંગ ફિગમાં યોજનાકીય રીતે બતાવવામાં આવે છે. 7.2. સમીકરણો (7.23) અને (7.26)નું કાળજીપૂર્વક વિશ્લેષણ દર્શાવે છે કે જથ્થાની ગણતરી અને વાસ્તવમાં અવલોકનોના ક્રમનો આશરો લીધા વિના કરવામાં આવે છે. ![]() . ગેઇન મેટ્રિસિસની ગણતરી અને સંગ્રહ અગાઉથી કરી શકાય છે. સંભવતઃ, જો પ્રોસેસરના ઇનપુટ પર અવલોકનોના આગમનનો દર એટલો ઊંચો ન હોય અને વાસ્તવિકતામાં સમીકરણો (7.23) અને (7.26) અનુસાર ગણતરીઓના અમલને અટકાવશે નહીં તો અમે મેટ્રિસિસની પ્રારંભિક ગણતરીની આ પદ્ધતિને સ્વીકારી શકતા નથી. સમય, અથવા જો તે શક્ય હોત તો યાદ રાખવાનું રીઅલ-ટાઇમ કમ્પ્યુટિંગ ક્ષમતાઓ કરતાં વધુ સુલભ અથવા સસ્તું ન હતું.
. ગેઇન મેટ્રિસિસની ગણતરી અને સંગ્રહ અગાઉથી કરી શકાય છે. સંભવતઃ, જો પ્રોસેસરના ઇનપુટ પર અવલોકનોના આગમનનો દર એટલો ઊંચો ન હોય અને વાસ્તવિકતામાં સમીકરણો (7.23) અને (7.26) અનુસાર ગણતરીઓના અમલને અટકાવશે નહીં તો અમે મેટ્રિસિસની પ્રારંભિક ગણતરીની આ પદ્ધતિને સ્વીકારી શકતા નથી. સમય, અથવા જો તે શક્ય હોત તો યાદ રાખવાનું રીઅલ-ટાઇમ કમ્પ્યુટિંગ ક્ષમતાઓ કરતાં વધુ સુલભ અથવા સસ્તું ન હતું.
કોષ્ટક 7.1. અલગ એક-પગલાની આગાહી ગાણિતીક નિયમો
|
સંદેશ મોડલ |
|
અવલોકન મોડેલ |
|
પ્રાથમિક માહિતી ; ; |
|
અનુમાન અલ્ગોરિધમ |
|
ગણતરી મેળવો |
|
અગાઉના તફાવતની ગણતરી |
|
પ્રારંભિક શરતો |
કાલમેન ફિલ્ટરિંગ એલ્ગોરિધમ્સનો મુખ્ય ફાયદો એટલો નથી કે તે ફિલ્ટરિંગ સમસ્યાનો ઉકેલ પૂરો પાડે છે (ઉકેલ અન્ય પદ્ધતિઓ દ્વારા ખૂબ અગાઉ મેળવવામાં આવ્યો હતો), પરંતુ તે ઉકેલ સીધો નક્કી કરે છે. વ્યવહારુ અમલીકરણપરિણામો જ્યારે ઘણા ઉકેલો વ્યવહારુ સમસ્યાઓવાસ્તવિક સમયમાં સમીકરણો (7.23) અને (7.26) નો ઉપયોગ કરીને ગણતરીની શક્યતા સુનિશ્ચિત કરવી શક્ય છે અને તેથી, વાસ્તવિક સમયમાં અનુક્રમિક ફિલ્ટરિંગ અલ્ગોરિધમનો અમલ કરો. ધ્યાનમાં લેવામાં આવેલા અભિગમની અન્ય એક લાક્ષણિકતા એ છે કે ભૂલના તફાવતની ગણતરી અંદાજના ઘટક તરીકે કરવામાં આવે છે અને તેથી તેનો ઉપયોગ અંદાજ પ્રક્રિયાની ચોકસાઈને નિયંત્રિત કરવા માટે થઈ શકે છે. આ એવી ધારણા પર આધારિત છે કે રિપોર્ટિંગ અને અવલોકન પેટર્ન અને અગાઉનું વિતરણ સંપૂર્ણપણે જાણીતું છે.

ચોખા. 7.2. અનુમાન અલ્ગોરિધમનો ઉપયોગ કરીને ગણતરીઓનો બ્લોક ડાયાગ્રામ
ઉદાહરણ 7.1. સંદેશ અને અવલોકન મૉડલને સ્કેલર સમીકરણો દ્વારા નિર્દિષ્ટ કરવા દો:
; ![]() .
.
અને ![]() અને
અને ![]() અથવા,. અહીં આપણે ધારીએ છીએ કે અવાજ સ્થિર અને સફેદ છે, જો કે સામાન્ય રીતે તે સ્થિર હોવું જરૂરી નથી. ચાલો આપણે એમ પણ માની લઈએ કે પ્રારંભિક મૂલ્યમાં શૂન્ય સરેરાશ અને એકમ તફાવત છે, જેથી અને .
અથવા,. અહીં આપણે ધારીએ છીએ કે અવાજ સ્થિર અને સફેદ છે, જો કે સામાન્ય રીતે તે સ્થિર હોવું જરૂરી નથી. ચાલો આપણે એમ પણ માની લઈએ કે પ્રારંભિક મૂલ્યમાં શૂન્ય સરેરાશ અને એકમ તફાવત છે, જેથી અને .
આ ઉદાહરણ માટે, અંદાજ સમીકરણ (7.24) સ્વરૂપ લે છે
સમીકરણમાંથી નિર્ધારિત લાભ સાથે
વિક્ષેપ સમીકરણનું સ્વરૂપ છે
ચાલો એ ધારણા હેઠળ પણ ગણતરી કરીએ કે આપણી પાસે અવલોકનો છે . અમે પ્રથમ પ્રારંભિક સ્થિતિનો ઉપયોગ કરીને લાભની ગણતરી કરીએ છીએ:
![]() ; .
; .
પ્રારંભિક સ્થિતિનો ઉપયોગ કરીને, આપણે મેળવીએ છીએ ![]() અને
અને ![]() . અમે વિક્ષેપ સમીકરણમાંથી આ અંદાજની ભૂલ ભિન્નતા નીચે પ્રમાણે નિર્ધારિત કરીએ છીએ:
. અમે વિક્ષેપ સમીકરણમાંથી આ અંદાજની ભૂલ ભિન્નતા નીચે પ્રમાણે નિર્ધારિત કરીએ છીએ:
હવે , અનુમાન અને અંતે, વિચલન શોધવા માટે ગણતરીના તમામ તબક્કાઓનું પુનરાવર્તન કરવું જરૂરી છે. જો કે ધ્યાનમાં લેવાયેલું ઉદાહરણ અત્યંત સરળ છે, તે ગણતરીના તમામ તબક્કાઓને એકદમ સ્પષ્ટ રીતે સમજાવે છે જે એક-પગલાની કાલમેન આગાહી અલ્ગોરિધમ્સ લાગુ કરવાની પ્રક્રિયામાં કરવાની જરૂર છે.
વ્યવહારિક રીતે એક મહત્વપૂર્ણ કાર્યોઉપરોક્ત પરિણામોથી ઉદ્દભવતી સમસ્યાઓ, અને પ્રારંભિક સ્થિતિનો સરેરાશ અને ભિન્નતા શોધવા કરતાં પણ વધુ મુશ્કેલ ઇનપુટ અવાજ અને માપન અવાજના તફાવતને નિર્ધારિત કરવાનું છે. ભિન્નતાના મૂલ્યો અને ઘણીવાર સમસ્યાના ભૌતિક પ્રકૃતિના વિશ્લેષણમાંથી અથવા વાજબી ચોકસાઈ સાથે સીધા માપન દ્વારા મેળવી શકાય છે. રાજ્ય વેક્ટરની પ્રાથમિક ક્ષણો વિશે સમાન ટિપ્પણી કરી શકાય છે. મૂલ્યને શૂન્ય પગલા પર રાજ્ય વેક્ટરના સરેરાશ મૂલ્યના શ્રેષ્ઠ અંદાજ તરીકે પસંદ કરવામાં આવ્યું હતું, એટલે કે, અવલોકનો કરવામાં આવે તે પહેલાં, અને ની પસંદગીમાં અનિશ્ચિતતાની ડિગ્રીની લાક્ષણિકતા તરીકે.
સંપૂર્ણ ગુણાત્મક અર્થમાં, એવી દલીલ કરી શકાય છે કે સંબંધિત અનિશ્ચિતતા વધારે છે સાચો અર્થ, અમે સેટ કરીએ છીએ તેટલા મોટા મૂલ્યો.
હવે ચાલો ફિલ્ટરિંગ સમસ્યા તરફ વળીએ. એક-સ્ટેપ એક્સ્ટ્રાપોલેટરનો ઉપયોગ આ મૂળભૂત સમસ્યાને ઉકેલવા માટે અનુકૂળ પગલા તરીકે કરવામાં આવ્યો છે, અને તે ઘણીવાર વ્યવહારુ મહત્વ ધરાવે છે. અમે જોશું કે ફિલ્ટરિંગ સમસ્યાના ઉકેલમાં એક-પગલાની આગાહીનો સમાવેશ થાય છે, જેના પરિણામો પછી વર્તમાન માહિતી અનુસાર ગોઠવવામાં આવે છે. ઘણીવાર, પરંતુ હંમેશા નહીં, ફિલ્ટરિંગ સમસ્યાના ઉકેલને એક-પગલાની ફિલ્ટરિંગ સમસ્યાના ઉકેલને પ્રાધાન્ય આપવું જોઈએ.
જો ફિલ્ટરિંગના પરિણામે મેળવેલ અંદાજ, એટલે કે, જાણીતો હોય, તો તે આ રીતે મેળવી શકાય છે.
ત્યારથી અને તેથી, ફક્ત માટે જ આધાર રાખે છે, અવલોકન જગ્યામાં અલગ સફેદ અવાજ ક્યાં છે તે સંબંધિત માહિતી શામેલ નથી. તેથી, અવલોકનોમાંથી મૂલ્યોની આગાહી કરવા માટે, ધારણા કરીને મૂલ્યોની એક પગલું આગળ આગાહી કરવી પૂરતી છે. આ અભિગમથી અમને સમીકરણ (7.27) મેળવવાની મંજૂરી મળી, જેનો આગળ ઉપયોગ કરવામાં આવશે. નોટેશનની સરળતા ખાતર ઇરાદાપૂર્વક છૂટક સંકેતને મંજૂરી આપીને, અમે તેને આ રીતે લખીએ છીએ. ખાસ જણાવેલા કેસો સિવાય, જેમ કે, અમે ધારીશું કે શરતો જગ્યા દ્વારા નિર્દિષ્ટ કરવામાં આવી છે. આ સંકેતોમાં, સમીકરણ (7.27) તરીકે ફરીથી લખવામાં આવશે
દેખીતી રીતે, અવલોકન પર આધારિત બે અંદાજો સમાન હોવા જોઈએ. તેથી, અમે સમીકરણો (7.23), (7.24) અને (7.26) માંથી અનુક્રમિક અંદાજ અલ્ગોરિધમ મેળવવા માટે સમીકરણ (7.28) નો ઉપયોગ કરી શકીએ છીએ. પ્રથમ, ચાલો yp-n.ie (7.28) at in (7.24) ને બદલીએ. પરિણામે આપણને મળે છે
જો આપણે આ સમીકરણની બંને બાજુઓને વડે ગુણાકાર કરીએ, જે સંક્રમણ સ્થિતિ મેટ્રિક્સના ગુણધર્મને લીધે, સમાન છે, તો આપણને મળશે
પરિણામી અભિવ્યક્તિને સરળ બનાવવા માટે, અમે પરિચય આપીએ છીએ , તરીકે વ્યાખ્યાયિત , અથવા
જો આપણે નક્કી કરવા માટે સમીકરણ (7.23) નો ઉપયોગ કરીએ. તેથી તે ફોર્મમાં લખાયેલું છે
જો કે સમીકરણ (7.30) કદાચ કાલમેન ફિલ્ટર માટે અંદાજ સમીકરણ લખવાનું સૌથી અનુકૂળ સ્વરૂપ છે, સૈદ્ધાંતિક રીતે લેખનના અન્ય ઘણા સ્વરૂપો મેળવી શકાય છે. તેમાંથી બે ખાસ કરીને ઉપયોગી છે. જો આપણે સંબંધનો ઉપયોગ કરીએ, તો સમીકરણ (7.30) નીચે પ્રમાણે ફરીથી લખી શકાય છે:
મેળવવા માટે "અપડેટ" જથ્થો રજૂ કરીને આ અભિવ્યક્તિને વધુ સરળ બનાવી શકાય છે
સમીકરણો (7.29)-(7.31) અથવા (7.32) સમીકરણ (7.26) સાથે મળીને લઘુત્તમ સરેરાશ ચોરસ ભૂલના માપદંડ અનુસાર રેખીય ફિલ્ટરિંગની સમસ્યાનો સંપૂર્ણ ઉકેલ પૂરો પાડે છે. માટે આપેલ પ્રારંભિક શરતો , એટલે કે અને , માટે અને અનુક્રમે, વન-સ્ટેપ એક્સ્ટ્રાપોલેટરની જેમ પ્રારંભિક શરતો બનાવવા માટે વપરાય છે.
જો આપણે ફિલ્ટરિંગ ભૂલના તફાવત માટે અભિવ્યક્તિઓ શોધીએ તો કાલમેન ફિલ્ટરિંગ અલ્ગોરિધમ્સ વધુ અનુકૂળ સ્વરૂપમાં રજૂ કરી શકાય છે. ![]() . વધુમાં, ભિન્નતાનો ઉપયોગ અંદાજ પ્રક્રિયાની ગુણવત્તા માટે માપદંડ તરીકે થઈ શકે છે. ભિન્નતાને ઘણીવાર પહેલાની વિસંગતતા કહેવામાં આવે છે કારણ કે તે અવલોકન પહેલાં અંદાજના ભિન્નતાને રજૂ કરે છે, અને ભિન્નતાને પશ્ચાદવર્તી ભિન્નતા કહેવામાં આવે છે. નક્કી કરવા માટે, આપણે સૌ પ્રથમ માટે અભિવ્યક્તિ શોધી કાઢીએ છીએ. ફરીથી, રજૂઆતના વિવિધ સ્વરૂપો શક્ય છે. અમારા કેસ માટે સૌથી અનુકૂળ પૈકીનું એક એ સમીકરણ (7.32) નો ઉપયોગ કરીને રજૂઆત છે. આ કિસ્સામાં તે નીચે પ્રમાણે વ્યાખ્યાયિત થયેલ છે:
. વધુમાં, ભિન્નતાનો ઉપયોગ અંદાજ પ્રક્રિયાની ગુણવત્તા માટે માપદંડ તરીકે થઈ શકે છે. ભિન્નતાને ઘણીવાર પહેલાની વિસંગતતા કહેવામાં આવે છે કારણ કે તે અવલોકન પહેલાં અંદાજના ભિન્નતાને રજૂ કરે છે, અને ભિન્નતાને પશ્ચાદવર્તી ભિન્નતા કહેવામાં આવે છે. નક્કી કરવા માટે, આપણે સૌ પ્રથમ માટે અભિવ્યક્તિ શોધી કાઢીએ છીએ. ફરીથી, રજૂઆતના વિવિધ સ્વરૂપો શક્ય છે. અમારા કેસ માટે સૌથી અનુકૂળ પૈકીનું એક એ સમીકરણ (7.32) નો ઉપયોગ કરીને રજૂઆત છે. આ કિસ્સામાં તે નીચે પ્રમાણે વ્યાખ્યાયિત થયેલ છે:
જો આપણે હવે સમીકરણો (7.29) માટે અને (7.19) અને (7.20) માટે અને માટે બદલીએ. ![]() આ અભિવ્યક્તિમાં, આપણને મળે છે
આ અભિવ્યક્તિમાં, આપણને મળે છે
જો આપણે માટે સમીકરણ (7.29) નો ઉપયોગ કરીએ, તો છેલ્લી અભિવ્યક્તિ તરીકે ફરીથી લખી શકાય છે
આ સમીકરણ અનુસાર, ફિલ્ટરિંગ ભૂલનો તફાવત એકદમ સરળ રીતે એક-પગલાની આગાહી ભૂલના તફાવત દ્વારા વ્યક્ત કરવામાં આવે છે. જથ્થાનો ઉપયોગ કરીને સમીકરણને નોંધપાત્ર રીતે સરળ બનાવવાનું પણ શક્ય બને છે (7.26). ચાલો તેને ફોર્મમાં ફરીથી લખીએ
માટે સૂત્ર (7.29) નો ઉપયોગ કરીને, આપણે આ અભિવ્યક્તિને આ રીતે લખી શકીએ છીએ
તે જોવાનું સરળ છે કે મૂલ્ય માં સર્પાકાર કૌંસ, કરતાં વધુ કંઈ રજૂ કરતું નથી. તેથી અમારી પાસે છે
આપેલ માટે સમીકરણ (7.1) દ્વારા આપવામાં આવેલ રેન્ડમ ચલના ભિન્નતાની ગણતરી કરીને આ અભિવ્યક્તિ સામાન્ય રીતે મેળવી શકાય છે.
સમીકરણો (7.29), (7.30), (7.33) અને (7.34) સંપૂર્ણપણે સ્વતંત્ર કાલમેન ફિલ્ટરના અંતિમ સંસ્કરણને વ્યાખ્યાયિત કરે છે. આ સમીકરણો કોષ્ટકમાં સારાંશ આપેલ છે. 7.2. પ્રાપ્ત અલ્ગોરિધમ્સ અનુસાર ગણતરીઓનો બ્લોક ડાયાગ્રામ ફિગમાં બતાવવામાં આવ્યો છે. 7.3, અને અલગ કાલમેન ફિલ્ટરનો બ્લોક ડાયાગ્રામ ફિગમાં છે. 7.4.
મહેરબાની કરીને ફરી એકવાર નોંધ લો કે વિક્ષેપ અને લાભ માટેના સમીકરણમાં અવલોકનોનો ક્રમ શામેલ નથી, તેથી જો જરૂરી હોય તો આ મૂલ્યોની અગાઉથી ગણતરી કરી શકાય છે. આ શક્યતા પરંપરાગત રીતે ફિગમાં બતાવવામાં આવી છે. 7.3 ડોટેડ લાઇન સાથે.
કોષ્ટક 7.2. સારાંશ અલગ ગાણિતીક નિયમો Kalman ફિલ્ટરિંગ
|
સંદેશ મોડેલ |
|
અવલોકન મોડેલ |
|
પ્રાથમિક માહિતી
|
|
ગાણિતીક નિયમો |
|
ગણતરી મેળવો |
|
અગાઉના તફાવતની ગણતરી |
|
પશ્ચાદવર્તી વિચલન માટે સમીકરણ |
|
પ્રારંભિક શરતો |
ફિગ. 7.4 ના બ્લોક ડાયાગ્રામનું વિશ્લેષણ દર્શાવે છે કે કાલમેન ફિલ્ટર આગાહી - કરેક્શનના વિચારને અમલમાં મૂકે છે. અગાઉના અંદાજને એક ડગલું આગળ એક્સ્ટ્રાપોલેટ કરવામાં આવે છે અને પછી અગાઉના તમામ અવલોકનોના આધારે નવા અવલોકનનો શ્રેષ્ઠ અંદાજ મેળવવા માટે વપરાય છે. વર્તમાન અવલોકનનો "શ્રેષ્ઠ અંદાજ" અને વાસ્તવિક અવલોકન વચ્ચેની ભૂલ, એટલે કે અથવા , નવી માહિતી [ઘટક ઓર્થોગોનલ ટુ ] રજૂ કરે છે. ભૂલને વજન સાથે વેઇટેડ કરવામાં આવે છે જે ઇનપુટ પ્રક્રિયાના ભિન્નતાના મૂલ્યને ધ્યાનમાં લે છે, માપન અને અનુમાનની ભૂલ સુધારણા સિગ્નલ જનરેટ કરે છે. કરેક્શન સિગ્નલ અનુમાનિત અંદાજમાં ઉમેરવામાં આવે છે અને પરિણામ એ એક નવો અંદાજ છે.

ફિગ.7.3. કાલમેન ફિલ્ટરિંગ અલ્ગોરિધમનો ઉપયોગ કરીને ગણતરીઓનો બ્લોક ડાયાગ્રામ.

ચોખા. 7.4. એક અલગ કાલમેન ફિલ્ટરનો બ્લોક ડાયાગ્રામ.
નોંધ કરો કે કાલમાન ફિલ્ટરનું બંધારણ સમીકરણ (7.30) ને અનુરૂપ અને ફિગમાં બતાવેલ છે. 7.4, સમીકરણ (7.1) દ્વારા આપવામાં આવેલ અને ફિગમાં બતાવેલ મૂળ સંદેશ મોડેલની રચના સાથે ખૂબ સમાન છે. 7.1 એ. ફિલ્ટરિંગ અલ્ગોરિધમ એ "અપડેટિંગ" ઘટકના ઉપયોગ પર આધારિત છે, જેમાં અવલોકનના પરિણામે પ્રાપ્ત નવી માહિતી શામેલ છે.
ઉદાહરણ 7.2.કાલમેન ફિલ્ટરિંગ અલ્ગોરિધમનો ઉપયોગ સમજાવવા માટે, સમીકરણ દ્વારા આપવામાં આવેલ દ્વિ-પરિમાણીય સંદેશ મોડેલને ધ્યાનમાં લો
![]()
અવલોકન સ્કેલર મોડેલ અનુસાર હાથ ધરવામાં આવે છે ![]()
ઇનપુટ અવાજ સ્થિર છે ![]() , અને માપન અવાજ તેની સાથે બિન-સ્થિર છે
, અને માપન અવાજ તેની સાથે બિન-સ્થિર છે ![]() . બીજા શબ્દોમાં કહીએ તો, સમ સૂચકાંકો માટેના માપન વિષમ સૂચકાંકો કરતાં ઓછા સચોટ છે. ચાલો ધારીએ કે પ્રારંભિક ભૂલો (અથવા પ્રારંભિક સ્થિતિ) નો તફાવત મેટ્રિક્સ દ્વારા આપવામાં આવે છે.
. બીજા શબ્દોમાં કહીએ તો, સમ સૂચકાંકો માટેના માપન વિષમ સૂચકાંકો કરતાં ઓછા સચોટ છે. ચાલો ધારીએ કે પ્રારંભિક ભૂલો (અથવા પ્રારંભિક સ્થિતિ) નો તફાવત મેટ્રિક્સ દ્વારા આપવામાં આવે છે. ![]() . તમારે 1 થી 10 સુધીની દરેક વસ્તુ માટે મૂલ્યની ગણતરી કરવાની જરૂર છે.
. તમારે 1 થી 10 સુધીની દરેક વસ્તુ માટે મૂલ્યની ગણતરી કરવાની જરૂર છે.
સમીકરણો (7.29) અને (7.34), તેમજ પ્રારંભિક સ્થિતિનો ઉપયોગ કરીને, તમે સરળતાથી ગણતરી કરી શકો છો અને , જે અનુક્રમે સમાન છે
![]()
હવે સમીકરણ (7 23) નો ઉપયોગ કરીને તમે પશ્ચાદવર્તી ભિન્નતાની ગણતરી કરી શકો છો
![]()
તેમજ પ્રાયોરી વેરિઅન્સ, જે સમીકરણ (7.34) અનુસાર આગળના પગલા માટે બદલાય છે અને સમાન બને છે
![]()

ચોખા. 7.5. ઉદાહરણ 7.2 માં ચર્ચા કરેલ કાલમેન ફિલ્ટરના લાભો બદલવાનું
હવે તમે ગણતરી કરી શકો છો, વગેરે. વેક્ટરના ઘટકો, જ્યારે 1 થી 10 સુધી બદલાય છે, આકૃતિ 7.5 માં દર્શાવવામાં આવ્યા છે. વિષમ મૂલ્યો માટે લાભમાં લાક્ષણિક વધારો નોંધો, જેના પરિણામે પ્રમાણમાં સચોટ માપ એમ્પ્લીફાઇડ થાય છે. તે અવલોકન કરી શકાય છે કે લાભ તેની સ્થિર-સ્થિતિ સુધી પહોંચે છે, સમયાંતરે થોડા નમૂનાઓમાં મૂલ્ય બદલાય છે. જથ્થાના ગુણોત્તરના પ્રભાવની સંક્ષિપ્તમાં અને શુદ્ધ ગુણાત્મક ચર્ચા કરવી કદાચ ઉપયોગી છે, પછી ભલે તે સામાન્ય મેળવવું મુશ્કેલ હોય. માત્રાત્મક પરિણામો. પ્રથમ, તે સંબંધિત મૂલ્યો છે જે અહીં મહત્વપૂર્ણ છે, સંપૂર્ણ મૂલ્યો નહીં. ખાસ કરીને, તે બતાવવાનું સરળ છે કે જ્યારે , અને સમાન હકારાત્મક સ્કેલર સ્થિરાંક દ્વારા ગુણાકાર કરવામાં આવે છે, ત્યારે તે બદલાતું નથી. ખૂબ જ અંદાજે, અમે ફક્ત એટલું જ કહી શકીએ કે લાભ સિગ્નલ-ટુ-નોઈઝ રેશિયો પર આધારિત છે. ગુણાંક મેટ્રિક્સના ઘટકો ઘટે છે કારણ કે મેટ્રિક્સ તત્વોના મૂલ્યો ઘટે છે અને [અથવા ફક્ત માં] અથવા મેટ્રિક્સ તત્વોના મૂલ્યો વધે છે. આ પરિણામ સાહજિક રીતે સમજી શકાય તેવું લાગે છે, કારણ કે જેમ જેમ આપણે ઘટતા જઈએ છીએ તેમ આપણે રાજ્યમાં નાના અને નાના ફેરફારોની અપેક્ષા રાખવી જોઈએ, અને તેથી અવલોકનોને આટલી ચોક્કસ રીતે "ટ્રેક" કરવાની જરૂર નથી. તેવી જ રીતે, જો તે ઘટે છે, તો ચોકસાઈ વધે છે પ્રારંભિક આકારણીઅને અવલોકનોમાં સમાવિષ્ટ માહિતીની જરૂરિયાત ઓછી થાય છે અને તેથી નફો ઓછો થાય છે. બીજી બાજુ, જો તે વધે છે, તો ગેઇન ફરીથી ઘટે છે, અતિશય માપન અવાજને અંદાજમાં ઉમેરવાથી અટકાવે છે. મર્યાદામાં, જ્યારે તે શૂન્ય તરફ વલણ ધરાવે છે, જેમ કે બતાવવામાં સરળ છે, તે અસિમ્પ્ટોટિક રીતે નાં મોટા મૂલ્યો માટે શૂન્ય સુધી પહોંચે છે. જેમ જેમ ભૂલ ભિન્નતા શૂન્ય તરફ વલણ ધરાવે છે, તેમ ભૂલ ભિન્નતા પણ શૂન્ય તરફ વળે છે અને અંદાજ પ્રક્રિયા અવલોકનથી સ્વતંત્ર બને છે અને ઇનપુટ સંતૃપ્તિ તરીકે ઓળખાતી શાસનમાં પ્રવેશ કરે છે. આ મોડ તરફ દોરી શકે છે ગંભીર સમસ્યાઓવિચલન વિચલનને સુધારવા માટેની પદ્ધતિઓ વિભાગમાં વિગતવાર ચર્ચા કરવામાં આવશે. 8.5.
મહત્તમ પશ્ચાદવર્તી સંભાવનાના માપદંડ પર આધારિત અંદાજ.ચાલો આપણે એક રેખીય અંદાજ એલ્ગોરિધમ મેળવીએ, એમ ધારીને, અને સામાન્ય વિતરણ કાયદાઓ ધરાવે છે. આ કિસ્સામાં, તે બતાવવાનું સરળ છે (જુઓ § 4.2) અને તે બધા માટે સામાન્ય વિતરણ કાયદા સાથે રેન્ડમ ચલ છે. તેથી તે રેખીય અવલોકન કાર્યનું પ્રતિનિધિત્વ કરે છે. બીજા શબ્દોમાં કહીએ તો, ન્યૂનતમ ભૂલ ભિન્નતા માપદંડ પર આધારિત રેખીય અંદાજ અલ્ગોરિધમ એ ન્યૂનતમ ભૂલ ભિન્નતા સાથેનો અંદાજ અલ્ગોરિધમ છે, અને ભૂલ ભિન્નતા એ અન્ય કોઈપણ રેખીય અથવા બિનરેખીય અંદાજ અલ્ગોરિધમના ભૂલ ભિન્નતા કરતાં ઓછી અથવા બરાબર છે.
મહત્તમ પશ્ચાદવર્તી સંભાવનાના માપદંડ પર આધારિત અંદાજ અલ્ગોરિધમ મેળવવા માટે, તમારે માત્ર આપેલ મૂલ્ય માટે મૂલ્યની શરતી સંભાવના ઘનતા નક્કી કરવાની અને પછી તેની ગાણિતિક અપેક્ષા શોધવાની જરૂર છે. આપેલ મૂલ્ય માટે શરતી વિતરણ સામાન્ય હોવાથી, તે પછી, જેમ જાણીતું છે (જુઓ §6.2), અનુમાન અલ્ગોરિધમ કે જે શરતી ગાણિતિક અપેક્ષાની ગણતરી કરે છે તે માત્ર સરેરાશ સ્ક્વેર ભૂલને જ નહીં, પણ અવિભાજ્ય અને અન્ય ઘણી માટે સરેરાશ સંપૂર્ણ ભૂલને પણ ઘટાડે છે. નુકશાન કાર્યો.
આમ, અન્ય કોઈપણ નુકશાન કાર્યો હેઠળ અંદાજને ધ્યાનમાં લઈને લઘુત્તમ વિચલન અંદાજ અલ્ગોરિધમ સોંપવું શક્ય છે, ઉદાહરણ તરીકે, મહત્તમ પશ્ચાદવર્તી સંભાવના (સંક્ષિપ્ત MAP અંદાજ) ના માપદંડનો ઉપયોગ કરીને અંદાજ, જ્યારે નુકશાન કાર્ય સરળ હોવાનું પસંદ કરવામાં આવે છે અને અંદાજ શરતી ઘનતાના મોડ સાથે એકરુપ છે.
ચાલો આ તકનીકનો ઉપયોગ કરીએ અને MAV-અંદાજ અલ્ગોરિધમ બનાવીએ. કેટલાક અભિવ્યક્તિઓ કે જેની સાથે આપણે કામ કરવું પડશે તે ખૂબ લાંબી હોઈ શકે છે, પ્રસ્તુતિની પ્રક્રિયામાં આપણે કેટલીકવાર સંકેતના સરળ સ્વરૂપનો ઉપયોગ કરીશું. થોડી શિથિલતાને મંજૂરી આપીને, અમે સંભાવનાની ઘનતા માટે સૂચકાંકના હોદ્દાને છોડી દઈશું, અને અમે આ ઘનતાઓની દલીલો તરીકે વિચારણા હેઠળના રેન્ડમ ચલોને સૂચિત કરીશું. ઉદાહરણ તરીકે, બિંદુ પર રેન્ડમ ચલની સંભાવના ઘનતાનું મૂલ્ય આ કિસ્સામાં આ રીતે લખાયેલ છે; એ જ રીતે લખાયેલ છે. અને સંકેતના આ સરળ સ્વરૂપને સંભવિતતા તરીકે અર્થઘટન કરવાનો પ્રયાસ કરવાની જરૂર નથી કે (આ સ્પષ્ટ નોનસેન્સ છે), અથવા તેના બદલે, સંભાવનાની ઘનતાને કાર્ય તરીકે ગણવામાં આવવી જોઈએ, અને આ કાર્યના મૂલ્ય તરીકે નહીં કે જે તે માટે લે છે. ચોક્કસ અવલોકન. કમનસીબે, ઈજનેરો જે બિન-કઠોર ગણિતનો ઉપયોગ કરે છે તેમાં, ફંક્શન વચ્ચેનો તફાવત, એક સેટના બીજા સેટના મેપિંગ તરીકે, અને ચોક્કસ અર્થઆ કાર્ય.
સંભવિત ઘનતા કાર્ય, જ્યારે મહત્તમ પશ્ચાદવર્તી સંભાવના માપદંડના આધારે અથવા શરતી ગાણિતિક અપેક્ષાના આધારે અંદાજ કાઢવામાં આવે છે, તે અવલોકનોના આપેલ ક્રમ માટે રેન્ડમ ચલનું કાર્ય છે અને તે તરીકે સૂચવવામાં આવે છે ![]() . શરતી ગાણિતિક અપેક્ષા પર આધારિત અંદાજ અલ્ગોરિધમ તરીકે વ્યાખ્યાયિત કરવામાં આવે છે
. શરતી ગાણિતિક અપેક્ષા પર આધારિત અંદાજ અલ્ગોરિધમ તરીકે વ્યાખ્યાયિત કરવામાં આવે છે
 (7.35)
(7.35)
મહત્તમ પશ્ચાદવર્તી સંભાવનાના માપદંડ પર આધારિત અંદાજ, જેને આપણે તરીકે દર્શાવીશું, તે સમીકરણના ઉકેલ તરીકે જોવા મળે છે.
 . (7.36)
. (7.36)
તે પ્રદાન કર્યું
 (7.37)
(7.37)
જો શરત (7.37) સંતુષ્ટ હોય, જેના માટે જરૂરી છે કે બીજા ડેરિવેટિવ્સનું મેટ્રિક્સ નકારાત્મક નિશ્ચિત હોય, તો સમીકરણ (7.36) નો ઉકેલ શરતી ઘનતાના મહત્તમને અનુરૂપ છે.
માટે અભિવ્યક્તિ શોધવા માટે ![]() , આપણે ગુણાકાર પ્રમેયનો ઉપયોગ કરીએ છીએ અને લખીએ છીએ
, આપણે ગુણાકાર પ્રમેયનો ઉપયોગ કરીએ છીએ અને લખીએ છીએ ![]() કેવી રીતે
કેવી રીતે
જો આપણે તેને નવા અવલોકનો અને અગાઉના અવલોકનોના સંયોજન તરીકે ગણીએ, તો સમીકરણ (7.38) ફોર્મમાં ફરીથી લખવામાં આવશે.
 (7.39)
(7.39)
ચાલો આ અભિવ્યક્તિના અંશને જોઈએ. ગુણાકાર પ્રમેયનો ઉપયોગ કરીને, આપણે લખી શકીએ છીએ
કારણ કે જ્ઞાન નિઃશંકપણે સંરક્ષણની જરૂરિયાતને દૂર કરે છે. જો આપવામાં આવે છે, તો in એ માત્ર એક રેન્ડમ ચલ છે અને ત્યારથી સફેદ ઘોંઘાટ છે, તો પછી બંનેમાં કોઈ માહિતી શામેલ નથી. જો આપણે અભિવ્યક્તિ (7.40) ને (7.39) માં બદલીએ, તો આપણને મળશે
ગુણાકાર પ્રમેયને છેદ પર લાગુ કરીને, અમે પરિણામી અભિવ્યક્તિ ફોર્મમાં લખીએ છીએ
સામાન્ય સ્કેલર સંભાવના કાર્ય દ્વારા ઘટાડા પછી, અમે મેળવીએ છીએ
 (7.41)
(7.41)
હવે તમે નક્કી કરી શકો છો શરતી ઘનતાસમીકરણ (7.41) ની જમણી બાજુની સંભાવના માટે દરેક અભિવ્યક્તિની ગણતરી કરીને આપેલ રેન્ડમ ચલની સંભાવના. ચાલો આપણે દરેક શબ્દને અલગથી ધ્યાનમાં લઈએ, સાબિત કરીએ કે (7.41) માં સમાવિષ્ટ દરેક સંભાવના ઘનતા સામાન્ય છે, અને પ્રથમ બે ક્ષણો નક્કી કરીએ જે સામાન્ય વિતરણને લાક્ષણિકતા આપે છે. ચાલો પહેલા અન્વેષણ કરીએ. તે સમીકરણ દ્વારા આપવામાં આવ્યું હોવાથી, a સામાન્ય છે રેન્ડમ પ્રક્રિયા, તો પછી સંભાવના ઘનતા નિઃશંકપણે સામાન્ય છે, કારણ કે તે સામાન્ય રેન્ડમ પ્રક્રિયાનો સરવાળો છે અને સતત મૂલ્ય. પ્રક્રિયાનું સરેરાશ મૂલ્ય છે
કારણ કે તે શૂન્ય સરેરાશ મૂલ્ય સાથેની રેન્ડમ પ્રક્રિયા છે. રેન્ડમ પ્રક્રિયાનો તફાવત વ્યાખ્યા દ્વારા સમાન છે
અને માં આ કિસ્સામાં
તેથી સંભવિત ઘનતા નીચેના સ્વરૂપમાં લખી શકાય છે:
હવે અભિવ્યક્તિના છેદને ધ્યાનમાં લો (7.41), વધુ સ્પષ્ટ રીતે, આપેલ મૂલ્ય ત્રણની સંભાવના ઘનતા. અવલોકન મોડેલ સમીકરણનો ઉપયોગ કરીને, ![]() તરીકે લખી શકાય છે
તરીકે લખી શકાય છે
સમસ્યાની મૂળ રચના અનુસાર, તે જાણીતું છે કે તેનો સામાન્ય વિતરણ કાયદો છે અને તે પર આધાર રાખતો નથી. એમ ધારીને ![]() - સામાન્ય, કોઈ શંકા નથી
- સામાન્ય, કોઈ શંકા નથી ![]() તે સામાન્ય પણ છે, કારણ કે તે બે રેન્ડમ ચલોનું રેખીય કાર્ય (સરવાળા) છે જેનો સામાન્ય વિતરણ કાયદો છે. આપેલ u માટે રેન્ડમ ચલની સંભાવના ઘનતા સામાન્ય છે, કારણ કે આ કિસ્સામાં તે ફક્ત સાથે એકરુપ થાય છે, જે પ્રારંભિક ધારણા મુજબ, સામાન્ય છે. નીચે અમે ધારણાની માન્યતા બતાવીશું
તે સામાન્ય પણ છે, કારણ કે તે બે રેન્ડમ ચલોનું રેખીય કાર્ય (સરવાળા) છે જેનો સામાન્ય વિતરણ કાયદો છે. આપેલ u માટે રેન્ડમ ચલની સંભાવના ઘનતા સામાન્ય છે, કારણ કે આ કિસ્સામાં તે ફક્ત સાથે એકરુપ થાય છે, જે પ્રારંભિક ધારણા મુજબ, સામાન્ય છે. નીચે અમે ધારણાની માન્યતા બતાવીશું ![]() , અને તેથી
, અને તેથી ![]() દરેક માટે સામાન્ય છે. ઘનતા સાથે સરેરાશ
દરેક માટે સામાન્ય છે. ઘનતા સાથે સરેરાશ ![]() બરાબર
બરાબર
જ્યાં અગાઉ રજૂ કરાયેલ નોટેશનનો ઉપયોગ થાય છે; ![]() શૂન્ય બરાબર છે, કારણ કે તે શૂન્ય સરેરાશ સાથે સફેદ અવાજ છે. પ્રક્રિયાનું વિક્ષેપ, વ્યાખ્યા દ્વારા, આપેલ મૂલ્યની બરાબર છે, કારણ કે જથ્થાઓનું વિક્ષેપ:, આ સાંકળમાં પ્રારંભિક તરીકે ગણવામાં આવે છે, તે સામાન્ય છે. તેથી, ધારણાની પુષ્ટિ થાય છે કે ઘનતા
શૂન્ય બરાબર છે, કારણ કે તે શૂન્ય સરેરાશ સાથે સફેદ અવાજ છે. પ્રક્રિયાનું વિક્ષેપ, વ્યાખ્યા દ્વારા, આપેલ મૂલ્યની બરાબર છે, કારણ કે જથ્થાઓનું વિક્ષેપ:, આ સાંકળમાં પ્રારંભિક તરીકે ગણવામાં આવે છે, તે સામાન્ય છે. તેથી, ધારણાની પુષ્ટિ થાય છે કે ઘનતા ![]() સામાન્ય
સામાન્ય
આપેલ માટે રાજ્યનું મૂલ્યાંકન, શરતી ગાણિતિક અપેક્ષા (લઘુત્તમ ભૂલ તફાવતના માપદંડ પર આધારિત મૂલ્યાંકન) પર આધારિત છે, તે સમીકરણ (7.54) દ્વારા નક્કી કરવામાં આવે છે અને અગાઉ પ્રાપ્ત પરિણામો સાથે સુસંગત છે [જુઓ. (7.30)]. જો કે, આ કિસ્સામાં અંદાજ શરતી બરાબર છે ગાણિતિક અપેક્ષા(એક સામાન્ય વિતરણ અહીં ધારણ કરવામાં આવ્યું હોવાથી), અને તે માત્ર રેખીય અંદાજોના વર્ગમાં શ્રેષ્ઠ નથી. અલબત્ત, સામાન્ય વિતરણ માટે બંને અંદાજો એકરૂપ થાય છે, કારણ કે શરતી ગાણિતિક અપેક્ષા છે રેખીય કાર્યઅવલોકનો
MAV-અંદાજ નક્કી કરવા માટે, તે મૂલ્ય શોધવું જરૂરી છે જે મહત્તમ થાય છે ![]() . ચાલો લાભ લઈએ જાણીતી પદ્ધતિઅને અમે ઘનતાની નહીં પણ મહત્તમ માટે જોઈશું
. ચાલો લાભ લઈએ જાણીતી પદ્ધતિઅને અમે ઘનતાની નહીં પણ મહત્તમ માટે જોઈશું
અને આ કિસ્સામાં ભૂલ વેરિઅન્સ મેટ્રિક્સના ભૌતિક ગુણધર્મોને કારણે જોવા મળે છે. પરિણામે, MAV અંદાજ શરતી ગાણિતિક અપેક્ષાના અંદાજ અને લઘુત્તમ ભૂલ તફાવતના માપદંડ પર આધારિત અંદાજ સાથે મેળ ખાય છે. મૂલ્યોનો સમૂહ એ અર્થમાં અંદાજ માટે પૂરતા આંકડા છે કે તેઓ સંપૂર્ણપણે શરતી ઘનતા નક્કી કરે છે.
એ નોંધવું જોઇએ કે કોઈ સીધો ઉપયોગ કરી શકે છે મૂળ સ્વરૂપઘનતા રેકોર્ડ્સ ![]() [અભિવ્યક્તિ (7.52)], અને કોમ્પેક્ટ સ્વરૂપ (7.53) નહીં. આ અભિગમ વધુ આકર્ષક લાગે છે, કારણ કે આ કિસ્સામાં તેને વધુ કોમ્પેક્ટ સ્વરૂપના જ્ઞાનની જરૂર નથી, જે એકદમ સરળ અને સ્પષ્ટ નથી. જો આપણે અભિવ્યક્તિ (7.52) નો ઉપયોગ કરીએ છીએ
[અભિવ્યક્તિ (7.52)], અને કોમ્પેક્ટ સ્વરૂપ (7.53) નહીં. આ અભિગમ વધુ આકર્ષક લાગે છે, કારણ કે આ કિસ્સામાં તેને વધુ કોમ્પેક્ટ સ્વરૂપના જ્ઞાનની જરૂર નથી, જે એકદમ સરળ અને સ્પષ્ટ નથી. જો આપણે અભિવ્યક્તિ (7.52) નો ઉપયોગ કરીએ છીએ ![]() , તો પછી સમીકરણ (7.57) ના પરિવર્તનના પરિણામે આપણી પાસે છે
, તો પછી સમીકરણ (7.57) ના પરિવર્તનના પરિણામે આપણી પાસે છે
જો આપણે હવે એવા શબ્દોને જૂથબદ્ધ કરીએ છીએ જેમાં સમાવેશ થાય છે, તો આપણને મળશે
જેનું સોલ્યુશન પ્રમાણમાં નીચેના પરિણામ તરફ દોરી જાય છે:
જો કે શ્રેષ્ઠ અંદાજ માટેનું આ સોલ્યુશન પાછલા એક જેવા અનુકૂળ સ્વરૂપમાં પ્રસ્તુત નથી, જો આપણે મેટ્રિક્સ ઇન્વર્ઝન લેમ્મા અથવા સીધા અભિવ્યક્તિઓ (7.55) અને (7.56) નો ઉપયોગ કરીએ તો તેને સરળતાથી (7.62) સુધી ઘટાડી શકાય છે.
વિભિન્નતા માટે સંખ્યાબંધ રસપ્રદ અને ઉપયોગી અભિવ્યક્તિઓ કાલમેન ફિલ્ટરિંગ અલ્ગોરિધમ્સમાંથી મેળવી શકાય છે. અહીં "અપડેટિંગ પ્રક્રિયા" ની વિભાવના સાથે સંબંધિત કેટલાક સૌથી ઉપયોગી છે:
સમીકરણ (7.70) સાથે, અમે મેળવીએ છીએ [જે સિસ્ટમના આઉટપુટ પર કાર્ય કરતી શ્રેષ્ઠ અંદાજ પણ છે, એટલે કે જ્યારે નિરીક્ષણ મોડેલ નીચેનું સ્વરૂપ ધરાવે છે:
તેઓ સૌથી સામાન્ય ફોર્મ્યુલેશનમાં રેખીય અલગ ફિલ્ટરિંગ સમસ્યાનો ઉકેલ પૂરો પાડે છે. નિષ્કર્ષમાં, અમે નોંધીએ છીએ કે સામાન્ય પરિણામોમાંથી કોષ્ટક 1 માં આપેલા પરિણામો વિગતો તરીકે અનુસરે છે. 7.2, જો આપણે સેટ કરીએ અને શૂન્યની બરાબર કરીએ.
પ્રકરણ 5 મૂળભૂત સિદ્ધાંત શ્રેષ્ઠ ગાળણક્રિયા
5.1. નિર્ણાયક અને રેન્ડમ સિગ્નલોનું શ્રેષ્ઠ રેખીય ફિલ્ટરિંગ
ફિલ્ટરિંગનો હેતુ છે:
સિગ્નલ અને અવાજના મિશ્રણમાંથી એકંદરે ઉપયોગી સિગ્નલ મેળવવું. આ કિસ્સામાં, શ્રેષ્ઠતા માપદંડ સિગ્નલ આકાર (સ્પેક્ટ્રમ) ની ન્યૂનતમ વિકૃતિ હોઈ શકે છે;
માહિતી વહન કરતી સિગ્નલના પરિમાણોનું પુનઃઉત્પાદન. આ કિસ્સામાં, શ્રેષ્ઠતા માપદંડ રેખીય ફિલ્ટર અથવા કોરિલેટરના આઉટપુટ પર મહત્તમ સિગ્નલ-ટુ-અવાજ ગુણોત્તર હોઈ શકે છે.
નીચેના પ્રકારના ફિલ્ટરેશનને અલગ પાડવામાં આવે છે:
1. લીનિયર ફિલ્ટરિંગ (ઉમેર, એમ્પ્લીફિકેશન, ડિફરન્સિએશન, એકીકરણ, વગેરે). અહીં આઉટપુટ સિગ્નલ રેખીય વિભેદક સમીકરણો દ્વારા વર્ણવવામાં આવે છે. રેખીય ફિલ્ટરિંગની મુખ્ય મિલકત એ બદલાતા ઇનપુટ સિગ્નલ અને આઉટપુટ સિગ્નલ વચ્ચેનો સંબંધ છે, એટલે કે. જો ઇનપુટ સિગ્નલ કેટલાક ઘટકોનો સરવાળો છે, તો આઉટપુટ સિગ્નલ પ્રમાણસર ઘટકોનો સરવાળો પણ હશે (સુપરપોઝિશનનો સિદ્ધાંત અવલોકન કરવામાં આવે છે).
2. બિનરેખીય ફિલ્ટરિંગ (ઘાત, મૂળ નિષ્કર્ષણ, ગુણાકાર, વગેરે). અહીં આઉટપુટ સિગ્નલ બિનરેખીય વિભેદક સમીકરણો દ્વારા વર્ણવવામાં આવે છે.
વ્યવહારમાં, એકલા રેખીય ફિલ્ટરિંગ દ્વારા મેળવવું અશક્ય છે.
શ્રેષ્ઠ મેળ ખાતી ફિલ્ટરિંગ.કોટેલનીકોવ-સિગર્ટ માપદંડને ધ્યાનમાં લેતા, શ્રેષ્ઠ રીસીવર બતાવવામાં આવ્યું હતું, જે અંતરાલ પરના સહસંબંધ અભિન્નની ગણતરીના સિદ્ધાંત પર બનેલ છે.
તે ત્યાં નોંધ્યું હતું કે આ સમસ્યાને મેળ ખાતા ફિલ્ટર્સનો ઉપયોગ કરીને ઉકેલી શકાય છે. જો કે, ત્યાં કોઈ એક શ્રેષ્ઠ ફિલ્ટર નથી, કારણ કે બધું નીચેના પરિબળો પર આધારિત છે:
1. અમારા માટે કયા ગુણવત્તા માપદંડ મહત્વપૂર્ણ છે, અને આ રેડિયો સિસ્ટમના હેતુ દ્વારા નક્કી કરવામાં આવે છે. આ સિગ્નલ ડિટેક્શન, ફિલ્ટર આઉટપુટનો સિગ્નલ-ટુ-નોઈઝ રેશિયો, વેવફોર્મ વગેરે હોઈ શકે છે.
2. કયા સંકેતો શોધવાની જરૂર છે (નિર્ધારિત, સ્વતંત્ર, સતત, રેન્ડમ).
3. રેડિયો ચેનલમાં કયા પ્રકારનો ઘોંઘાટ અને દખલગીરી કાર્ય કરે છે (વધારા, પલ્સ, કેન્દ્રિત).
તેથી, શ્રેષ્ઠતાનો અર્થ ફક્ત સંકેતો અને અવાજના વિશિષ્ટ મોડેલો માટે જ લાગુ પડે છે.
મેળ ખાતા ફિલ્ટરમાં અલગ સિગ્નલોનું સ્વાગત.જાણીતા પરિમાણો સાથેના સંકેતો માટે, શ્રેષ્ઠ ફિલ્ટરે આઉટપુટ પર મહત્તમ ગુણવત્તા માપદંડ આપવો જોઈએ, ઉદાહરણ તરીકે, મહત્તમ સિગ્નલ-ટુ-નોઈઝ રેશિયો. આ કામગીરી સિગ્નલોને મેચ્ડ ફિલ્ટર (MF) માં સંકલિત કરીને પરિપૂર્ણ કરી શકાય છે. આ કરવા માટે, તમારી પાસે એક ફિલ્ટર હોવું જરૂરી છે જેનો આવેગ પ્રતિભાવ ખાસ કરીને આ સિગ્નલને અનુરૂપ હોય.
તે જાણીતું છે કે મેળ ખાતા ફિલ્ટરનો આવેગ પ્રતિભાવ ઇનપુટ સિગ્નલ (ફિગ. 5.1) ની ટાઇમ-શિફ્ટ અને મિરર-ઇનવર્ટેડ કૉપિ હોવી જોઈએ.
મેળ ખાતા ફિલ્ટરનો આવેગ પ્રતિભાવ, જ્યારે , શૂન્યની બરાબર હોય, ત્યારે મૂલ્ય ઇનપુટ પલ્સની અવધિ કરતાં ઓછું ન હોઈ શકે. માઈનસ ચિહ્ન ઇનપુટ સિગ્નલના સંબંધમાં SF ના આવેગ પ્રતિભાવની વિશિષ્ટતા દર્શાવે છે.

ચલોને બદલતી વખતે અને જ્યારે આવેગ પ્રતિભાવ સમાન હોય છે, ત્યારે કન્વોલ્યુશન ઇન્ટિગ્રલ (ડુહેમેલ ઇન્ટિગ્રલ)ને આ રીતે રજૂ કરી શકાય છે.
|
|
સહસંબંધ શિફ્ટ ક્યાં છે.
આ ક્ષણે મહત્તમ આઉટપુટ સિગ્નલ દેખાશે. આનો અર્થ એ છે કે સમગ્ર સિગ્નલ સમયગાળા દ્વારા પ્રક્રિયા કરવામાં આવે છે. આવશ્યકપણે, આ ક્ષણે ઇનપુટ સિગ્નલ અને મિરર કૉપિ ગોઠવાયેલ છે, જે () ને અનુરૂપ છે, જેનો અર્થ થાય છે.
મેળ ખાતા ફિલ્ટરની નોંધપાત્ર મિલકત એ છે કે તે આરએમએસ અવાજ મૂલ્યમાં પીક આઉટપુટ સિગ્નલનો ઉચ્ચતમ ગુણોત્તર પ્રદાન કરે છે, એટલે કે. તે મહત્તમ સંભાવના પૂરી પાડે છે ().
અહીં, તે મહત્તમ સિગ્નલ-ટુ-અવાજ ગુણોત્તર છે જે સુનિશ્ચિત થયેલ છે, અને સિગ્નલ આકારનું પ્રજનન નથી, એટલે કે. બધું ઊર્જા દ્વારા નક્કી થાય છે, સિગ્નલના આકારથી નહીં.
ચાલો અમુક ચોક્કસ કાર્યો જોઈએ.
નિર્ણાયક સંકેતનું મેળ ખાતું ફિલ્ટરિંગ.આ કિસ્સામાં, પ્રોસેસ્ડ સિગ્નલનો આકાર અગાઉથી જાણીતો છે. અહીં મેળ ખાતા ફિલ્ટરની લાક્ષણિકતાઓ જાણીતા સિગ્નલ મૂલ્યો દ્વારા સંપૂર્ણપણે નક્કી કરવામાં આવે છે. ચાલો આપણે ફક્ત એ હકીકત નક્કી કરવાની જરૂર છે કે સ્વીકૃત અમલીકરણમાં સંકેત છે. આ ગુણવત્તા માપદંડ છે. તે સ્પષ્ટ છે કે મેળ ખાતું ફિલ્ટર સિગ્નલ આકારને સાચવી શકશે નહીં, કારણ કે મહત્તમ સિગ્નલ-ટુ-અવાજ ગુણોત્તર પ્રદાન કરવા માટે શોધને માત્ર મેળ ખાતા ફિલ્ટરની જરૂર છે. અહીં પ્રક્રિયાની ગુણવત્તા માટેનો માપદંડ ચોક્કસપણે આ વલણ છે.
સૂત્ર (5.2) માં, આવેગ પ્રતિભાવ તરીકે રજૂ કરી શકાય છે
જો ફિલ્ટર રેખીય હોય, તો સિગ્નલની અસર અને ફિલ્ટર પર અવાજની અસરને સ્વતંત્ર ગણી શકાય. તેથી, અમે આગળ આ બે પ્રક્રિયાઓને અલગથી ધ્યાનમાં લઈશું.
મૂલ્ય (5.4) ને (5.2) માં બદલીને, અમે સિગ્નલ કન્વોલ્યુશન ઇન્ટિગ્રલ મેળવીએ છીએ
આમ, આઉટપુટ સિગ્નલ, સતત ગુણાંક સુધી, ઇનપુટ સિગ્નલ સાથે એકરુપ હોય છે અને ઇનપુટ સિગ્નલની ઊર્જા સમાન હોય છે.
પ્રાપ્ત સિગ્નલના સ્પેક્ટ્રમ સાથે મેળ ખાતા ફિલ્ટરની કંપનવિસ્તાર-આવર્તન લાક્ષણિકતાનું જટિલ જોડાણ આ ક્ષણે સિગ્નલના વર્ણપટના ઘટકો વચ્ચે મ્યુચ્યુઅલ તબક્કાના શિફ્ટનું વળતર તરફ દોરી જાય છે. ભૌતિક રીતે, આનો અર્થ એ છે કે તરત જ, સિગ્નલના તમામ સ્પેક્ટ્રલ ઘટકો તબક્કામાં (તબક્કામાં) ઉમેરાય છે, આઉટપુટ પીક બનાવે છે. તે કહેવાય છે વળતર પ્રારંભિક તબક્કાઓ . આ કિસ્સામાં, મેળ ખાતા ફિલ્ટરના આઉટપુટ પર ઊર્જા વધારાની અવધિ ઇનપુટ પલ્સની અવધિ કરતાં ટૂંકી બને છે, એટલે કે. થઈ રહ્યું છે સંકોચનસમાન ગુણાંક સાથે સંકેત
જેટલું મોટું, સહસંબંધ કાર્ય સંકુચિત અને ઘોંઘાટના સ્તર પર સિગ્નલ ઊર્જાનો વધુ પડતો.
મેળ ખાતા ફિલ્ટરના આઉટપુટ પર મહત્તમ મૂલ્ય માત્ર સિગ્નલ ઊર્જા દ્વારા નક્કી કરવામાં આવે છે અને તે તેના આકાર પર આધારિત નથી. આ કિસ્સામાં, મેળ ખાતા ફિલ્ટરનું ટ્રાન્સમિશન ગુણાંક તે ફ્રીક્વન્સીઝ પર વધારે છે જ્યાં ઉપયોગી સિગ્નલ ઊર્જાનો મોટો ભાગ કેન્દ્રિત હોય છે અને જ્યાં સિગ્નલની વર્ણપટની ઘનતા ઓછી હોય છે.
સિગ્નલના મજબૂત સ્પેક્ટ્રલ ઘટકોના કંપનવિસ્તારમાં વધારા સાથે પ્રારંભિક તબક્કાઓના વળતરનું સંયોજન સફેદ અવાજની પૃષ્ઠભૂમિ સામે સિગ્નલ શોધવા માટે શ્રેષ્ઠ SF સુનિશ્ચિત કરે છે.
મેળ ખાતા ફિલ્ટર દ્વારા સફેદ અવાજ પસાર કરવો.ચાલો આપણે મેળ ખાતા ફિલ્ટર પર સફેદ અવાજની અસરને ધ્યાનમાં લઈએ, જેનો આવેગ પ્રતિભાવ સિગ્નલ સાથે મેળ ખાય છે.
મેળ ખાતા ફિલ્ટરના આઉટપુટ પર અવાજની સ્પેક્ટ્રલ ઘનતા ઇનપુટ અવાજની સ્પેક્ટ્રલ ઘનતાના ઉત્પાદન અને મેળ ખાતા ફિલ્ટરના ટ્રાન્સમિશન ગુણાંકના મોડ્યુલસના ચોરસ જેટલી હોય છે.
|
|
મેળ ખાતા ફિલ્ટરનું ટ્રાન્સમિશન ગુણાંક ક્યાં છે.
ગુણાંક એ મેળ ખાતા ફિલ્ટરનો કંપનવિસ્તાર-આવર્તન પ્રતિભાવ છે, જે આવેગ પ્રતિભાવના ફોરિયર ટ્રાન્સફોર્મ તરીકે મેળવે છે.
જો સ્પેક્ટ્રલ ઘનતાસફેદ અવાજ સતત છે, અને રેડિયો સિસ્ટમફ્રિક્વન્સી બેન્ડ દ્વારા મર્યાદિત છે, પછી મેળ ખાતા ફિલ્ટરના ઇનપુટ પર સ્પેક્ટ્રલ અવાજની ઘનતા
પારસેવાલની સમાનતા મુજબ
(5.13) નું વર્ગમૂળ લઈને, આપણે સફેદ અવાજનું મૂળ સરેરાશ ચોરસ મૂલ્ય શોધીએ છીએ
અને આ સફેદ અવાજની સ્પેક્ટ્રલ ઘનતા સાથે ઇનપુટ સિગ્નલની ઊર્જાના ગુણોત્તર સિવાય બીજું કંઈ નથી, જે સિગ્નલના આકાર પર આધારિત નથી.
અનિશ્ચિતતાના કિસ્સામાં શ્રેષ્ઠ સુસંગત રિસેપ્શન માટેની પદ્ધતિઓનો વિચાર કરતી વખતે, જેમ કે રડાર સિસ્ટમ્સમાં, નેમેન-પિયરસન માપદંડને અમલમાં મૂકવા માટે મલ્ટિ-ચેનલ કોરિલેટરનો ઉપયોગ કરવામાં આવે છે.
શ્રેષ્ઠ મેળ ખાતા ફિલ્ટરિંગ સાથે, દરેક ચેનલના સહસંબંધકોને મેળ ખાતા ફિલ્ટર્સ દ્વારા બદલવામાં આવે છે (ફિગ. 5.2). આ કિસ્સામાં, સિગ્નલના આગમનના સમયનો સંદર્ભ લેવાની જરૂર નથી.

બિન-સફેદ અવાજ માટે સિગ્નલ-ટુ-નોઈઝ રેશિયો. "સફેદ અવાજ એ અસંબંધિત અવાજ છે. સામાન્ય રીતે, અવાજ સહસંબંધિત હોઈ શકે છે અને મનસ્વી વર્ણપટ શક્તિ ધરાવે છે. આવા ઘોંઘાટને "સફેદ" કરવા માટે, વિશિષ્ટ વ્હાઈટનિંગ ફિલ્ટર (WF) નો ઉપયોગ કરવામાં આવે છે (ફિગ. 5.3), જેનો ટ્રાન્સમિશન ગુણાંક ઇનપુટ બિન-સફેદ અવાજના અસમાન સ્પેક્ટ્રમને વળતર આપવા માટે પસંદ કરવામાં આવે છે. વ્હાઇટીંગ ફિલ્ટરનું આઉટપુટ સ્પેક્ટ્રલ ઘનતા સાથે સફેદ અવાજ ઉત્પન્ન કરશે એન 0 .

વ્હાઇટીંગ ફિલ્ટર સિગ્નલમાં તેના ફેરફારો કરશે, સિગ્નલ-ટુ-અવાજ ગુણોત્તર અભિવ્યક્તિ દ્વારા નક્કી કરવામાં આવશે.
OF ના આઉટપુટ પર સિગ્નલ ઊર્જા ક્યાં છે.
જેમ જાણીતું છે, ફિલ્ટરિંગનો સાર એ રેન્ડમ પ્રક્રિયાના સમય-વિવિધ પરિમાણોનું સતત મૂલ્યાંકન છે. જો સંદેશ સ્કેલર છે માર્કોવ પ્રક્રિયા(સ્થિર ગૌસીયન પ્રક્રિયા માટે આનો અર્થ એ છે કે સહપ્રવાહ કાર્યનું સ્વરૂપ Aexp(-B|t-u|) છે, તો પછી સમસ્યાનો ઉકેલ આના પર આધારિત હોઈ શકે છે નીચેના સિદ્ધાંતો, ધ્યેયની સિદ્ધિને સરળ બનાવવી:
અમારા માટે રુચિની પ્રક્રિયાઓનું વર્ણન સમય-વિવિધ પરિમાણો સાથે રેખીય સિસ્ટમ્સનો ઉપયોગ કરીને હાથ ધરવામાં આવવું જોઈએ, જે સિસ્ટમના ઇનપુટ્સ પર સફેદ અવાજ લાગુ કરવામાં આવે ત્યારે તે પેદા કરશે;
સંદેશ જનરેટ કરતી રેખીય પ્રણાલીને વિભેદક સમીકરણનો ઉપયોગ કરીને વર્ણવવામાં આવવી જોઈએ જેનો ઉકેલ ઇચ્છિત સંદેશ છે;
રેખીય સિસ્ટમના આઉટપુટ મૂલ્ય તરીકેનો શ્રેષ્ઠ અંદાજ વિભેદક સમીકરણના ઉકેલ તરીકે ઉલ્લેખિત થવો જોઈએ, જેના ગુણાંક પ્રક્રિયાઓના આંકડા દ્વારા નક્કી કરવામાં આવે છે.
આ સિદ્ધાંતો અનુસાર બાંધવામાં આવેલી લીનિયર સિસ્ટમ્સને કાલમેન-બ્યુસી ફિલ્ટર્સ કહેવામાં આવે છે, જે આ ક્ષેત્રમાં મૂળ કાર્ય સાથે સંબંધિત છે. આ સિદ્ધાંતોથી વિપરીત, ઇન્ટિગ્રલ વિનર ફિલ્ટરિંગમાં પ્રક્રિયાઓનું વર્ણન કોવેરિયન્સ ફંક્શન્સ, રેખીય સિસ્ટમ્સ - ઇમ્પલ્સનો ઉપયોગ કરીને હાથ ધરવામાં આવે છે. ક્ષણિક પ્રતિભાવ, શ્રેષ્ઠ અંદાજો - વિનર-હોપ્ફ અભિન્ન સમીકરણના ઉકેલ તરીકે.
શ્રેષ્ઠ કાલમેન ફિલ્ટર ઇનનું વિભેદક સમીકરણ પ્રમાણભૂત સ્વરૂપફોર્મ ધરાવે છે:
શ્રેષ્ઠ ફિલ્ટરનો મેટ્રિક્સ ગેઇન ક્યાં છે.
કાલમેન ફિલ્ટર બિન-સ્થિર રેન્ડમ પ્રક્રિયાઓનું ગતિશીલ શ્રેષ્ઠ ફિલ્ટરિંગ કરે છે. શ્રેષ્ઠ ફિલ્ટરિંગ સમસ્યાનો ઉકેલ વેક્ટર-મેટ્રિક્સ વિભેદક (અથવા તફાવત) સમીકરણોની સિસ્ટમને ઉકેલવા માટે ઘટાડવામાં આવે છે. આ પદ્ધતિ તમને રિકરન્ટ સ્વરૂપમાં સમીકરણોની બંધ સિસ્ટમ ચલાવવાની મંજૂરી આપે છે, જે તકનીકી અમલીકરણ માટે સૌથી અનુકૂળ છે. અનિવાર્યપણે, કાલમેન ફિલ્ટર એ એક કોમ્પ્યુટેશનલ માહિતી પ્રોસેસિંગ અલ્ગોરિધમ છે જે મૂળ સિસ્ટમ વિશે પ્રાથમિક માહિતીના સંકુલનો ઉપયોગ કરે છે (સંરચના, પરિમાણો, રાજ્યના અવાજ અને માપન અવાજની આંકડાકીય લાક્ષણિકતાઓ, પ્રારંભિક પરિસ્થિતિઓ વિશેની માહિતી વગેરે). આ ફિલ્ટર ઉત્પન્ન કરે છે આંકડાકીય પ્રક્રિયાસ્ત્રોત સિસ્ટમ મોડેલના ગતિશીલ ગુણધર્મોને ધ્યાનમાં લેતા અવલોકન માહિતી. કાલમેન ફિલ્ટરનું માળખું એ મૂળ ગતિશીલ સિસ્ટમનું એક મોડેલ છે જેમાં ફિલ્ટરિંગ ભૂલ સુધારણા સાથે કરેક્શન સિગ્નલનો ઉપયોગ કરવામાં આવે છે.
ફોર્મનું કરેક્શન સિગ્નલ ક્યાં છે:
આ કિસ્સામાં, શ્રેષ્ઠ બિન-સ્થિર ગતિશીલ ફિલ્ટરકાલમેન એ એક બંધ સ્વચાલિત નિયંત્રણ સિસ્ટમ છે જેમાં મૂળ સિસ્ટમનું ગાણિતિક મોડલ હોય છે, અને મોડલના આઉટપુટ પર રાજ્યનો અંદાજ જનરેટ થાય છે, અને ઇનપુટ પર મેટ્રિક્સ નોન-સ્ટેશનરી ગેઇન સાથે કરેક્શન સિગ્નલ પ્રાપ્ત થાય છે. K(t):
તેથી, ગતિશીલ ફિલ્ટરિંગ અલ્ગોરિધમ પર આધારિત છે શાસ્ત્રીય સિદ્ધાંતમેટ્રિક્સ ગેઇન K(t) સાથે વિચલન દ્વારા નિયમન, ન્યૂનતમ સરેરાશ ચોરસ ફિલ્ટરિંગ ભૂલ પૂરી પાડે છે. સુધારણા સંકેતમાં મૂળ સિસ્ટમની સ્થિતિના વર્તમાન અવલોકન સિગ્નલ z(t)નો સમાવેશ થાય છે, જે મૂળ સિસ્ટમના મોડલની સ્થિતિના વર્તમાન સંકેત દ્વારા પૂરક છે. સિગ્નલ એ ફિલ્ટરિંગ ભૂલ સુધારણા સિગ્નલ છે અને લાક્ષણિકતા ધરાવે છે વધારાની માહિતીવર્તમાન માપ z(t) અને વર્તમાન માપ z(t) પહેલાના અંદાજોના પરિણામોમાંથી મેળવેલ રાજ્ય અંદાજો વચ્ચે. શ્રેષ્ઠ કાલમેન ફિલ્ટરના મેટ્રિક્સ ડાયાગ્રામમાં ફિગમાં બતાવેલ ફોર્મ છે. 4.18. આ યોજના ગતિશીલ ફિલ્ટરિંગ અલ્ગોરિધમનો અમલ કરે છે, જ્યારે મૂળ સિસ્ટમની સ્થિતિ વિભેદક સમીકરણો દ્વારા નિર્દિષ્ટ કરવામાં આવે છે, જેની જમણી બાજુ અવલોકન પર આધારિત નથી.
માહિતી પ્રક્રિયાની સ્વતંત્ર પદ્ધતિઓના વિકાસના સંદર્ભમાં શ્રેષ્ઠ સ્વતંત્ર કાલમેન ફિલ્ટરિંગ ખાસ કરીને વ્યાપક બન્યું છે. તે તફાવત વેક્ટર-મેટ્રિક્સ સમીકરણો દ્વારા વર્ણવેલ અલગ ગતિશીલ સિસ્ટમો માટે સતત શ્રેષ્ઠ ગતિશીલ ફિલ્ટરિંગના પરિણામોનું વિસ્તરણ છે.
ચોખા. 4.17. શ્રેષ્ઠ કાલમેન ફિલ્ટરનું મેટ્રિક્સ સર્કિટ
શ્રેષ્ઠ સમીકરણ રેખીય ફિલ્ટરતમને અનુક્રમે સ્કોર્સની ગણતરી કરવાની મંજૂરી આપે છે. સ્કોરની ગણતરી કરવા માટે, ફક્ત અગાઉના સ્કોર મૂલ્યો અને પેરામીટર નંબરનો ઉપયોગ કરવામાં આવે છે. એટ-ટાઇમ અંદાજનું મૂલ્ય એ-ટાઈમ માપન અને સમયાંતરે માપનના અંદાજ વચ્ચેના ભારિત તફાવતના ઉમેરા સાથે સમયના અંદાજમાંથી ગણવામાં આવે છે. આમ, પુનરાવર્તિત સ્વરૂપમાં અલગ કાલમેન ફિલ્ટર અનુક્રમિક અંદાજોની ગણતરી માટે પુનરાવર્તિત પ્રક્રિયા હાથ ધરે છે, જેમાં દરેક પગલા પર ગણતરીના પરિણામોની થોડી સંખ્યાને યાદ રાખવાની જરૂર પડે છે.
અલગ કાલમેન ફિલ્ટરનું મેટ્રિક્સ સર્કિટ ફિગમાં બતાવવામાં આવ્યું છે. 4.19 મૂળ ગતિશીલ સિસ્ટમના મોડેલો સાથે અને માપન સિસ્ટમ.
ચોખા. 4.18. એક અલગ કાલમેન ફિલ્ટરનું મેટ્રિક્સ સર્કિટ
ફિલ્ટરેશન સમીકરણ મેળવવા માટેનો આધાર ગતિશીલ સિસ્ટમની સ્થિતિના સમીકરણો અને અવલોકન (માપ) સમીકરણ છે. રેખીય ગતિશીલ સિસ્ટમની સ્થિતિનું સમીકરણ વેક્ટર-મેટ્રિક્સ સ્વરૂપમાં તફાવત સમીકરણોની સિસ્ટમ દ્વારા વર્ણવવામાં આવે છે:
ક્યાં - સંક્રમણ મેટ્રિક્સપરિમાણની સ્થિતિઓ , - ડાયનેમિક સિસ્ટમની પરિમાણીય સ્થિતિ વેક્ટર; - ડિસ્ટર્બન્સ મેટ્રિક્સ, અથવા પરિમાણનું ઇનપુટ સિગ્નલ; - રેન્ડમ ગૌસીયન ક્રમનું પરિમાણીય વેક્ટર.
માપન સિસ્ટમ મોડેલના આઉટપુટ પર પ્રાપ્ત સિગ્નલનું નિરીક્ષણ (માપવા) માટેનું સમીકરણ તફાવત-વેક્ટર સમીકરણ દ્વારા વર્ણવવામાં આવ્યું છે:
અવલોકન (માપ) નું પરિમાણીય વેક્ટર ક્યાં છે; - માપન ભૂલોના રેન્ડમ ગૌસીયન અસંબંધિત ક્રમનું પરિમાણીય વેક્ટર જે ગતિશીલ સિસ્ટમની સ્થિતિનું અવલોકન કરવાના પરિણામને વિકૃત કરે છે; પરિમાણ પરિમાણ મેટ્રિક્સ
ચાલો ધારીએ કે આ ક્ષણે સિસ્ટમની સ્થિતિનો અંદાજ અને સંક્રમણ મેટ્રિક્સ જાણીતું છે. પછી આ અંદાજને પ્રારંભિક એક તરીકે લઈ શકાય છે અને સમયના એક તબક્કે અંદાજની ગણતરી સમીકરણ અનુસાર કરી શકાય છે:
આ અંદાજ અગાઉના અવલોકનો પરથી અનુમાનિત (એક્સ્ટ્રાપોલેટેડ) છે. તેની ગણતરી કરતી વખતે, આ ક્ષણે લીધેલ ગતિશીલ સિસ્ટમની સ્થિતિનું છેલ્લું માપ વપરાયું ન હતું. આ સિસ્ટમ સ્ટેટ વેક્ટરનો અંદાજ કાઢવામાં ભૂલો તરફ દોરી જશે. ટ્રાન્ઝિશન મેટ્રિક્સ દ્વારા આ ક્ષણે અંદાજની ભૂલ માં અનુગામી તમામ અંદાજો સુધી વિસ્તરે છે, અને ફિલ્ટર ઓપરેશનના લાંબા સમયગાળા દરમિયાન, ભૂલો એકઠા થઈ શકે છે અને અસંતોષકારક પરિણામો તરફ દોરી શકે છે. એક સમયે માપનો ઉપયોગ કરીને અને કરેક્શન સિગ્નલ જનરેટ કરીને અંદાજને સુધારી શકાય છે: . અહીંથી
આ અભિવ્યક્તિમાં (9.14) અવેજીમાં, અમે પ્રામાણિક સ્વરૂપમાં અલગ કાલમેન ફિલ્ટરનું સમીકરણ મેળવીએ છીએ:
આવા ફિલ્ટરના શ્રેષ્ઠ ટ્રાન્સમિશન ગુણાંકે સ્થિતિ (4.152) અનુસાર સરેરાશ ચોરસ ફિલ્ટરિંગ ભૂલની ન્યૂનતમ પ્રદાન કરવી જોઈએ.
સુરક્ષા પ્રશ્નોપ્રકરણ 4 સુધી
1. GAS NK માં નિર્ણય લેવાના કયા માપદંડોનો ઉપયોગ કરવામાં આવે છે?
2. "આદર્શ નિરીક્ષક", "નાયમન-પિયર્સન" અને "વૉલ્ડ" શોધ માપદંડ વચ્ચે સમાનતા અને તફાવતો શું છે?
3. શું છે ભૌતિક અસ્તિત્વસાચી તપાસ, યોગ્ય બિન-શોધ, ચૂકી ગયેલ સિગ્નલ અને ખોટા એલાર્મની સંભાવનાઓ?
4. "એક બિંદુએ" ખોટા અલાર્મની સંભાવના મલ્ટિ-ચેનલ સિસ્ટમ સાથે કેવી રીતે સરખાવવામાં આવે છે?
5. નેમેન-પિયરસન માપદંડને અમલમાં મૂકતી વખતે તપાસ થ્રેશોલ્ડ કેવી રીતે પસંદ કરવામાં આવે છે?
6. કોટેલનિકોવ-સિગર્ટ માપદંડનો અમલ કરતી વખતે તપાસ થ્રેશોલ્ડ કેવી રીતે પસંદ કરવામાં આવે છે?
7. વાલ્ડ ડિટેક્શન માપદંડનો અમલ કરતી વખતે ડિટેક્શન થ્રેશોલ્ડ કેવી રીતે પસંદ કરવામાં આવે છે?
8. સહસંબંધ રીસીવર અને મેચ કરેલ ફિલ્ટરની પર્યાપ્તતા અને લક્ષણો શું છે?
9. આકારણીની માન્યતાનો સાર શું છે?
10. મૂલ્યાંકન અસરકારકતાનો સાર શું છે?
11. નિષ્પક્ષ અંદાજનો સાર શું છે?
12. ફિશર ઇન્ફોર્મેશન મેટ્રિક્સ શું છે?
13. સોનાર બાંધવામાં દિશા શોધવાની લાક્ષણિકતા કેવી રીતે બને છે?
14. ચિહ્નોનો શબ્દકોશ અને સોનાર વસ્તુઓની છબીઓના મૂળાક્ષરો કેવી રીતે રચાય છે?
15. સોનાર પદાર્થોના વર્ગીકરણ અને માન્યતાની વિભાવનાઓ વચ્ચે પર્યાપ્તતા અને તફાવત શું છે?
શ્રેષ્ઠ વિનર ફિલ્ટર શોધવું એ Wiener-Hopf ઇન્ટિગ્રલ સમીકરણના ઉપયોગ પર આધારિત હતું, જેમાં સ્થિર રેન્ડમ પ્રક્રિયાઓ ધ્યાનમાં લેવામાં આવી હતી. આવર્તન ડોમેન. 1960 માં, આર. કાલમેન અને આર. બુસીએ સમયના ડોમેનમાં રેખીય ફિલ્ટરિંગની સમસ્યાને ધ્યાનમાં લીધી અને, "સ્ટેટ સ્પેસ" ની વિભાવનાનો ઉપયોગ કરીને, એક નવો પ્રસ્તાવ મૂક્યો. અસરકારક પદ્ધતિરેન્ડમ ભૂલના ચોરસની ન્યૂનતમ ગાણિતિક અપેક્ષાના માપદંડ અનુસાર શ્રેષ્ઠ સિસ્ટમોનું સંશ્લેષણ, સ્થિર અને બિન-સ્થિર માર્કોવ રેન્ડમ પ્રક્રિયાઓ બંને માટે લાગુ પડે છે. કાલમેન અને બ્યુસી દ્વારા ઉપયોગમાં લેવાતી "સ્ટેટ સ્પેસ" ની વિભાવના એ ધારણા પર આધારિત છે કે રેન્ડમ પ્રક્રિયા માર્કોવિયન છે, શ્રેષ્ઠ રેખીય પ્રણાલીઓના સંશ્લેષણ માટેના તેમના અભિગમને કેટલીકવાર શ્રેષ્ઠ રેખીય ફિલ્ટરિંગનો માર્કોવ સિદ્ધાંત કહેવામાં આવે છે.
ઉપયોગ ન કરતી બધી રેન્ડમ પ્રક્રિયાઓનું વર્ણન સહસંબંધ કાર્યોઅથવા વર્ણપટની ઘનતા, અને રાજ્યના વિભેદક સમીકરણો અથવા સમીકરણોની મદદથી, કાલમેન અને બ્યુસીએ બતાવ્યું કે રેન્ડમ પ્રભાવ હેઠળ શ્રેષ્ઠ રેખીય સિસ્ટમ(શ્રેષ્ઠ કાલમેન-બ્યુસી ફિલ્ટર) એ અસંગત રેખીય વિભેદક સમીકરણોની કેટલીક સિસ્ટમને સંતોષવી આવશ્યક છે. આ વિભેદક સમીકરણોનો ઉપયોગ કરીને શ્રેષ્ઠ સિસ્ટમ શોધવી એ Wiener-Hopf ઈન્ટિગ્રલ સમીકરણોનો ઉપયોગ કરતાં વધુ સરળ છે, ખાસ કરીને બિન-સ્થિર રેન્ડમ પ્રક્રિયાઓના કિસ્સામાં.
શ્રેષ્ઠ ફિલ્ટર સમીકરણોની વ્યુત્પત્તિ કાલમેન અને બુસી દ્વારા બહુવિધ રેન્ડમ પ્રક્રિયાઓ માટે હાથ ધરવામાં આવી હતી. ચાલો સરળ, પરંતુ ઘણીવાર વ્યવહારમાં, એક-પરિમાણીય ફિલ્ટર્સના ઉદાહરણનો ઉપયોગ કરીને કાલમાન-બુસી પદ્ધતિના મુખ્ય વિચારથી પરિચિત થઈએ.
ચાલો ધારીએ કે સિન્થેસાઇઝ કરવામાં આવી રહેલી સિસ્ટમએ ચોક્કસ સિગ્નલનું પુનઃઉત્પાદન કરવું જોઈએ, જે સામાન્ય કિસ્સામાં બિન-સ્થિર રેન્ડમ પ્રક્રિયા છે. ધારો કે આ સિગ્નલ ઉપરાંત, સિસ્ટમના ઇનપુટ પર પણ અવાજ છે
જે, સામાન્ય કિસ્સામાં, શૂન્ય સરેરાશ મૂલ્ય સાથે "સફેદ અવાજ" પ્રકારની બિન-સ્થિર રેન્ડમ પ્રક્રિયા છે. આમ, કુલ ઇનપુટ સિગ્નલ
એક-પરિમાણીય શ્રેષ્ઠ કાલમેન-બ્યુસી ફિલ્ટર માટે સમીકરણ મેળવવા માટે, તે જરૂરી છે કે રેન્ડમ પ્રક્રિયા પ્રથમ નીચેના સ્વરૂપના પ્રથમ-ક્રમના વિભેદક સમીકરણ દ્વારા રજૂ થવી જોઈએ:
રેન્ડમ પ્રક્રિયાની આંકડાકીય લાક્ષણિકતાઓના આધારે સમયનું ચોક્કસ કાર્ય ક્યાં છે - શૂન્ય સરેરાશ મૂલ્ય સાથે "સફેદ અવાજ" પ્રકારની બિન-સ્થિર રેન્ડમ પ્રક્રિયા.
બિન-સ્થિર રેન્ડમ પ્રક્રિયાઓના સહસંબંધ કાર્યોનું સ્વરૂપ છે

જ્યાં સમયના સતત, સતત વિભેદક કાર્યો છે, અને
સ્થિર રેન્ડમ પ્રક્રિયાઓના વિશેષ કિસ્સામાં, તેમના સહસંબંધ કાર્યો
જો સિસ્ટમના આઉટપુટ પરની રેન્ડમ પ્રક્રિયા સમાન હોય, તો સિસ્ટમની રેન્ડમ ભૂલ પુનઃઉત્પાદિત સિગ્નલ અને આઉટપુટ સિગ્નલ વચ્ચેના તફાવતની સમાન હોય છે
કાલમેન અને બ્યુસીએ બતાવ્યું કે શ્રેષ્ઠ સિસ્ટમ (શ્રેષ્ઠ કાલમેન-બ્યુસી ફિલ્ટર), કોઈપણ સમયે રેન્ડમ ભૂલના વર્ગની ન્યૂનતમ ગાણિતિક અપેક્ષા સાથે સંકેતનું પ્રજનન સુનિશ્ચિત કરે છે, તેનું વર્ણન બિન-સમાન વિભેદક સમીકરણ દ્વારા કરવું જોઈએ. ફોર્મ
આમ, શ્રેષ્ઠ કાલમાન-બ્યોસી ફિલ્ટરનું સંશ્લેષણ કરતી વખતે, વિભેદક સમીકરણ (9.140) માં આવા સમય કાર્યો શોધવામાં સમસ્યા ઓછી થાય છે જે સ્ક્વેર્ડ રેન્ડમ ભૂલની ન્યૂનતમ ગાણિતિક અપેક્ષાને સુનિશ્ચિત કરશે, એટલે કે.
એમ માનીને કે રેન્ડમ પ્રક્રિયા ફોર્મ (9.135) માં રજૂ કરવામાં આવી છે, અમે પુરાવા વિના, ન્યૂનતમ (9.141) સુનિશ્ચિત કરતા કાર્યો શોધવા માટેના સૂત્રો રજૂ કરીએ છીએ.
વિધેયોને વ્યાખ્યાયિત કરતા પહેલા, રેન્ડમ એરર (ભૂલ ભિન્નતા) ના વર્ગની ગાણિતિક અપેક્ષા સમાન અમુક સમય કાર્ય શોધો:
તેને નીચેના રિકાટી વિભેદક સમીકરણના ઉકેલ તરીકે વ્યાખ્યાયિત કરવામાં આવે છે:
(9.143) ઉકેલવા માટે તમારે સામાન્ય રીતે પ્રારંભિક મૂલ્ય જાણવાની જરૂર છે, તેથી
ફંક્શન શોધ્યા પછી, ફોર્મ્યુલાનો ઉપયોગ કરીને ફંક્શન નક્કી કરો
![]()
અને સૂત્ર અનુસાર કાર્ય
સૌથી વધુ મુશ્કેલ તબક્કો Kalman-Bucy પદ્ધતિ દ્વારા શ્રેષ્ઠ ફિલ્ટર્સનું સંશ્લેષણ એ રિક્કાટી સમીકરણ (9.143) નો ઉકેલ છે. સામાન્ય રીતે, તેને કમ્પ્યુટરનો ઉપયોગ કરવાની જરૂર છે.
સમીકરણ (9.143), તેની વિશિષ્ટતા અને સ્થિરતાના ઉકેલના અસ્તિત્વનો અભ્યાસ કરવાના પ્રશ્નો પણ સ્વતંત્ર મહત્વના છે.
આપેલ (9.146), શ્રેષ્ઠ Kalman-Bucy ફિલ્ટર સમીકરણ કેટલીકવાર નીચે પ્રમાણે લખવામાં આવે છે:
વિભેદક સમીકરણ (9.140) ફિગમાં બતાવેલ શ્રેષ્ઠ ફિલ્ટરના બ્લોક ડાયાગ્રામને અનુરૂપ છે. 9.19, એ; વિભેદક સમીકરણ (9.147) ફિગમાં બતાવેલ બ્લોક ડાયાગ્રામને અનુરૂપ છે. 9.19, બી. આમ, શ્રેષ્ઠ કાલમેન-બ્યુસી ફિલ્ટરને કેટલીક ગતિશીલ સિસ્ટમ તરીકે ગણી શકાય પ્રતિસાદ, અંજીર માં બતાવેલ બ્લોક ડાયાગ્રામ ધરાવે છે. 9.19, a, અથવા ફિગમાં. 9.19, બી. સ્વાભાવિક રીતે, આ બંને માળખાકીય આકૃતિઓ સમાન છે.
બિન-સ્થિર રેન્ડમ પ્રક્રિયાઓ માટે, કાર્યો સમય પર આધાર રાખે છે અને શ્રેષ્ઠ Kalman-Bucy ફિલ્ટર બિન-સ્થિર છે.
સ્થિર રેન્ડમ પ્રક્રિયાઓ માટે, કાર્યો અને સ્થિર સ્થિતિમાં પણ, કાર્યો સમય પર આધાર રાખતા નથી, તેથી આ કિસ્સામાં શ્રેષ્ઠ કાલમેન-બ્યુસી ફિલ્ટર સ્થિર છે, જે વિભેદક સમીકરણ દ્વારા નિર્ધારિત છે. સતત ગુણાંક
(9.148) દ્વારા વર્ણવેલ સિસ્ટમ, સ્થિર સ્થિતિમાં, તેના આઉટપુટ પર સ્થિર પુનઃઉત્પાદન કરશે રેન્ડમ સિગ્નલન્યૂનતમ સરેરાશ ચોરસ ભૂલ સાથે.


સ્વાભાવિક રીતે, માટે સ્થિર પ્રક્રિયાઓકાલમેન-બુસી પદ્ધતિ અને વિનર પદ્ધતિ દ્વારા મેળવેલા પરિણામો એકરૂપ છે. સમીકરણ (9.148), સમયના ડોમેનમાં મેળવેલા, સમીકરણ (9.125) દ્વારા આવર્તન ડોમેનમાં વ્યાખ્યાયિત શ્રેષ્ઠ વિનર ફિલ્ટરની સમકક્ષ છે.
ચાલો આપણે વિભેદક સમીકરણ (9.135) ના રૂપમાં રેન્ડમ પ્રક્રિયાને રજૂ કરવાની સંભાવના વિશે કાલમેન-બુસી ફિલ્ટર્સ માટેના ખૂબ જ મહત્વપૂર્ણ પ્રશ્ન પર ટૂંકમાં ધ્યાન આપીએ.
શોધવું (9.135) આકાર આપનાર ફિલ્ટર (સ્થિર અથવા બિન-સ્થિર) નક્કી કરવાની સમસ્યા સાથે સંકળાયેલું છે, જે, જ્યારે તેના ઇનપુટ પર સફેદ અવાજના સંપર્કમાં આવે છે, ત્યારે વ્યક્તિને તેના આઉટપુટ પર આપેલ રેન્ડમ પ્રક્રિયા મેળવવાની મંજૂરી આપે છે. બ્લોક ડાયાગ્રામ(9.135) અનુસાર આવા આકારનું ફિલ્ટર ફિગમાં બતાવ્યા પ્રમાણે રજૂ કરી શકાય છે. 9.20.
સ્થિર રેન્ડમ પ્રક્રિયાઓ માટે, ફિલ્ટર્સને આકાર આપવાના પરિમાણો નક્કી કરવા માટેની પદ્ધતિઓ સારી રીતે વિકસિત છે. આ કિસ્સાઓમાં, આકાર આપનાર ફિલ્ટરને સતત ગુણાંક સાથેના સામાન્ય વિભેદક સમીકરણ દ્વારા અથવા યોગ્ય આકાર આપનાર ફિલ્ટર ટ્રાન્સફર કાર્ય દ્વારા વર્ણવી શકાય છે. જ્યારે સ્થિર રેન્ડમ પ્રક્રિયાની સ્પેક્ટ્રલ ઘનતા માટેની અભિવ્યક્તિ આવર્તનના અપૂર્ણાંક તર્કસંગત કાર્યનું સ્વરૂપ ધરાવે છે, એટલે કે, જ્યારે વર્ણપટની ઘનતા માટે અભિવ્યક્તિ હોઈ શકે છે ત્યારે આકાર આપનાર ફિલ્ટરના સ્થાનાંતરણ કાર્યને શોધવાનું ખાસ કરીને સરળ છે. બે જટિલ સંયોજન પરિબળોના ઉત્પાદન તરીકે રજૂ થાય છે:
"સફેદ અવાજ" પ્રકારના સ્થિર રેન્ડમ સિગ્નલને આકાર આપતા ફિલ્ટરના ઇનપુટ પર કાર્ય કરવા દો, જેમાં સ્પેક્ટ્રલ ડેન્સિટી હોય છે, પછી શેપિંગ ફિલ્ટરના આઉટપુટ પર સિગ્નલની વર્ણપટની ઘનતા હોય છે.
ધ્યાનમાં લેતા (9.149), અમે લખી શકીએ છીએ
શેપિંગ ફિલ્ટરનું ફ્રીક્વન્સી ટ્રાન્સફર ફંક્શન ક્યાં છે
છેલ્લી અભિવ્યક્તિમાં સ્થાનાંતરિત કરીને આપણે આકાર આપતા ફિલ્ટરના સ્થાનાંતરણ કાર્ય માટે અભિવ્યક્તિ મેળવીએ છીએ
![]()
જાણીને ટ્રાન્સફર કાર્યફિલ્ટર બનાવતા, આપણે ફોર્મ (9.135) નું વિભેદક સમીકરણ શોધીએ છીએ, જે રેન્ડમ પ્રક્રિયાઓને સંબંધિત છે
જો વર્ણપટની ઘનતા આવર્તનનું અપૂર્ણાંક તર્કસંગત કાર્ય નથી અથવા તે પ્રાયોગિક રીતે મેળવવામાં આવે છે, તો આકાર આપનાર ફિલ્ટર શોધવા માટે તે પહેલા અંદાજિત હોવું આવશ્યક છે. અપૂર્ણાંક તર્કસંગત કાર્યફ્રીક્વન્સીઝ
નિષ્કર્ષમાં, એ નોંધવું જોઈએ કે જો ઇનપુટ પ્રભાવો સ્થિર રેન્ડમ પ્રક્રિયાઓ છે, તો કાલમેન-બ્યુસી પદ્ધતિનો શ્રેષ્ઠ વિનર ફિલ્ટર્સને સંશ્લેષણ કરવાની પદ્ધતિ પર કોઈ ફાયદો નથી. આ પદ્ધતિનો ઉપયોગ મુખ્યત્વે શ્રેષ્ઠ બિન-સ્થિર રેખીય ફિલ્ટર્સને સંશ્લેષણ કરવા માટે થાય છે.
જ્યારે પુનઃઉત્પાદિત સંકેત રેન્ડમ ગુણાંક સાથે બહુપદી દ્વારા વર્ણવવામાં આવે છે ત્યારે પણ તે શ્રેષ્ઠ ફિલ્ટરની રચના અને પરિમાણોને તદ્દન સરળ રીતે શોધવાનું શક્ય બનાવે છે:
જાણીતી આંકડાકીય લાક્ષણિકતાઓ સાથે રેન્ડમ ચલો ક્યાં છે.
શ્રેષ્ઠ રેખીય કાલમેન-બ્યુસી ફિલ્ટર્સનું સંશ્લેષણ, શરૂઆતમાં સફેદ અવાજના સ્વરૂપમાં દખલગીરી માટે હાથ ધરવામાં આવ્યું હતું, જે પાછળથી વધુ વિકસિત થયું હતું. સામાન્ય કેસો, ઉદાહરણ તરીકે, અસમાન સ્પેક્ટ્રલ ઘનતા ધરાવતા સહસંબંધિત હસ્તક્ષેપના કિસ્સામાં, બિનરેખીય ફિલ્ટરિંગ વગેરેના કિસ્સામાં. ચાલો આપણે છેલ્લે નોંધ લઈએ કે શ્રેષ્ઠ કાલમેન-બ્યુસી ફિલ્ટર્સ, જેમ કે શ્રેષ્ઠ વિનર ફિલ્ટર્સ, માત્ર શ્રેષ્ઠ પ્રજનનની સમસ્યાને ઉકેલવા માટે પરવાનગી આપે છે.
અવાજ (ફિલ્ટરિંગ) ની પૃષ્ઠભૂમિ સામે સંકેત, પણ આંકડાકીય અપેક્ષા, આંકડાકીય તફાવત, વગેરેની સમસ્યાઓ.
ઉદાહરણ 9.8. રેખીય ટ્રેકિંગ સિસ્ટમના ઇનપુટ પર એક સ્થિર રેન્ડમ પ્રક્રિયા છે જેની વર્ણપટની ઘનતા
અને "સફેદ અવાજ" પ્રકારનો રેન્ડમ અવાજ, જેમાં વર્ણપટની ઘનતા હોય છે
ગુણાંકના સંખ્યાત્મક મૂલ્યો
Kalman-Bucy પદ્ધતિ દ્વારા સિસ્ટમના શ્રેષ્ઠ સ્થાનાંતરણ કાર્યને નિર્ધારિત કરો, ન્યૂનતમ સરેરાશ ચોરસ ભૂલની ખાતરી કરો.
1. સિસ્ટમ ઉપયોગી સિગ્નલનું પુનઃઉત્પાદન કરવા માટે રચાયેલ હોવાથી, કન્વર્ટિંગ ઓપરેટર સિગ્નલનું પુનઃઉત્પાદન કરે છે, તેથી,
(9.149) અનુસાર, અમે સ્પેક્ટ્રલ ઘનતા માટેની અભિવ્યક્તિ જટિલ સંયોજક પરિબળોના ઉત્પાદનના સ્વરૂપમાં રજૂ કરીએ છીએ.
અને અમે શોધીએ છીએ
2. આપેલ સ્થિર રેન્ડમ પ્રક્રિયાને "સફેદ અવાજ" પ્રકારની સ્થિર રેન્ડમ પ્રક્રિયાને અમુક આકાર આપતી ફિલ્ટરની પ્રતિક્રિયા તરીકે ધ્યાનમાં લેતા, સ્પેક્ટ્રલ ઘનતા ધરાવતા, અમને આ આકાર આપનાર ફિલ્ટરનું ફ્રીક્વન્સી ટ્રાન્સફર ફંક્શન (9.150) અનુસાર મળે છે:
3. શેપિંગ ફિલ્ટરનું ટ્રાન્સફર ફંક્શન શોધો:

4. ફોર્મિંગ ફિલ્ટરનું પરિણામી ટ્રાન્સફર ફંક્શન રેન્ડમ પ્રક્રિયાઓને લગતા નીચેના વિભેદક સમીકરણને અનુરૂપ છે

ફોર્મ (9.135) માં છેલ્લું વિભેદક સમીકરણ લાવવા માટે, અમે ધારીએ છીએ કે સફેદ અવાજની સ્પેક્ટ્રલ ઘનતા છે અને અંતિમ રેન્ડમ પ્રક્રિયા તરીકે રજૂ કરી શકાય છે
ટોમસ્ક સ્ટેટ યુનિવર્સિટી 2011 મેનેજમેન્ટનું બુલેટિન, કમ્પ્યુટર ટેકનોલોજીઅને કોમ્પ્યુટર સાયન્સ નંબર 3(16) UDC 517.511 V.I. સ્માગિન, એસ.વી. અજાણ્યા વિક્ષેપો સાથે લીનિયર ડિસક્રીટ નોનસ્ટેશનરી સિસ્ટમ્સમાં સ્મેજિન ફિલ્ટરિંગ એક શ્રેષ્ઠ ફિલ્ટરનું સંશ્લેષણ કરવા માટેનું એક અલ્ગોરિધમ કે જે ડિસક્રીટ રેખીય નોનસ્ટેશનરી ડાયનેમિક સિસ્ટમના સ્ટેટ વેક્ટરનું મૂલ્યાંકન નિર્ધારિત કરે છે તેને એડિટિવ અવ્યવસ્થિત અજ્ઞાત વિક્ષેપો સમાવિષ્ટ ગણવામાં આવે છે. કોમ્પ્યુટેશનલ પ્રયોગના પરિણામો રજૂ કરવામાં આવ્યા છે. મુખ્ય શબ્દો: લીનિયર ડિસ્ક્રીટ નોન-સ્ટેશનરી સિસ્ટમ્સ, કાલમેન ફિલ્ટર, અજાણ્યા ખલેલ. ઘણા લેખકોની કૃતિઓમાં મહાન ધ્યાનકાલમેન ફિલ્ટરિંગ અલ્ગોરિધમ્સના વિકાસ માટે સમર્પિત છે અજ્ઞાત એડિટિવ ડિસ્ટર્બન્સ અને પેરામીટર્સ સાથે સિસ્ટમ્સના વર્ગ માટે કે જેનો વાસ્તવિક મોડલ તરીકે ઉપયોગ કરી શકાય છે ભૌતિક સિસ્ટમો, અજ્ઞાત નિષ્ફળતાઓ સાથે ઑબ્જેક્ટના મોડલ. રાજ્ય વેક્ટર અંદાજોની ગણતરી માટે જાણીતી પદ્ધતિઓ એલ્ગોરિધમ્સ પર આધારિત છે જે અજાણ્યા વિક્ષેપના અંદાજનો ઉપયોગ કરે છે. પેપર્સ સ્ટેટ સ્પેસના વિસ્તરણ માટેના અલ્ગોરિધમ્સની ચર્ચા કરે છે (ઓબ્જેક્ટના મુખ્ય મોડલમાં અવલોકનક્ષમ વિક્ષેપનું મોડલ ઉમેરવામાં આવે છે) અને બે-સ્ટેજ ફિલ્ટરિંગ અલ્ગોરિધમ કે જે સમસ્યાના વિઘટનને કારણે કોમ્પ્યુટેશનલ ખર્ચ ઘટાડે છે. પેપર્સ રિકરન્ટ શ્રેષ્ઠ ફિલ્ટરિંગ એલ્ગોરિધમ્સનો અભ્યાસ કરે છે જે અજ્ઞાત વિક્ષેપના અંદાજનો ઉપયોગ કરે છે જે તેમની દ્રાવ્યતા માટે એકદમ કડક શરતો ધરાવે છે. IN આ કામવિક્ષેપના અજાણ્યા સતત ઘટક સાથેના એક અલગ બિન-સ્થિર ઑબ્જેક્ટ માટે, એક શ્રેષ્ઠ ફિલ્ટરિંગ પદ્ધતિ પ્રસ્તાવિત છે જે અજાણ્યા ખલેલના અંદાજનો ઉપયોગ કરતી નથી. પદ્ધતિ મોડેલને રૂપાંતરિત કરવા અને તેને રેખીય કાલમેન ફિલ્ટરિંગની સમસ્યામાં ઘટાડવા પર આધારિત છે. IN આ લેખપરિણામોને બિન-સ્થિર સ્વતંત્ર ઑબ્જેક્ટ માટે સમસ્યા હલ કરવાના કિસ્સામાં સામાન્યકૃત કરવામાં આવે છે. 1. સમસ્યાનું નિવેદન અમે એક અલગ સિસ્ટમને ધ્યાનમાં લઈએ છીએ જે નીચેના તફાવત સમીકરણો દ્વારા વર્ણવવામાં આવે છે: x(k + 1) = A(k) x(k) + f + q (k), x(0) = x0 , (1) જ્યાં x(k) ∈ R n – રાજ્ય વેક્ટર; A(k) – n×n મેટ્રિક્સ; f - અજ્ઞાત સતત વેક્ટર; q(k) - સફેદ ગૌસીયન રેન્ડમ ક્રમલાક્ષણિકતાઓ સાથે M (q (k)) = 0, M(q(k)q Τ (j)) = Q(k)δk, j. (2) અવલોકન ચેનલનું સ્વરૂપ y (k) = S (k) x(k) + v(k) , (3) y (k) ∈ R l – માપન વેક્ટર છે; S(k) – પરિમાણનું મેટ્રિક્સ l × n; v(k) - સફેદ ગૌસ- V.I. સ્માગિન, એસ.વી. Smagin 44 Sov માપન ભૂલોનો રેન્ડમ ક્રમ, લાક્ષણિકતાઓ સાથે: M(v(k)) = 0, M(q (k)v Τ (j)) = 0, M(v(k)v Τ (j)) = V (k)δi , j ; (4) મેટ્રિસિસ (S(k), A(k)) માટે અવલોકનક્ષમતા શરતો સંતુષ્ટ છે. વેક્ટર x0 રેન્ડમ છે અને M(x(0)) = x0 , M ((x(0) − x0)(x(0) − x0 સાથે q(k) અને v(k) પ્રક્રિયાઓ પર આધાર રાખતો નથી. ) T ) = P0 . સિસ્ટમ (1) અને અવલોકન ચેનલ (3) માટે, તે ફિલ્ટરનું સંશ્લેષણ કરવું જરૂરી છે જે વિક્ષેપના અજાણ્યા સતત ઘટકના અંદાજનો ઉપયોગ કર્યા વિના રાજ્ય વેક્ટરના અંદાજની ગણતરી કરે છે. 2. ફિલ્ટર સિન્થેસિસ ચાલો અલગ સિસ્ટમનું પરિવર્તન કરીએ (1). અમે સમીકરણ (1) સમાન સમીકરણમાંથી બાદબાકી કરીને ઑબ્જેક્ટના વર્ણનમાંથી ખલેલ f ના સતત ઘટકને બાકાત કરીએ છીએ, પરંતુ એક ઘડિયાળ ચક્ર દ્વારા ખસેડવામાં આવે છે: x(k) = A(k − 1) x(k − 1) + f + q(k − 1) . (5) પરિણામે આપણને મળે છે નીચેના સમીકરણ: x(k + 1) = (A(k) + En) x(k) − A(k − 1) x(k − 1) + q (k) − q(k − 1) . (6) ચાલો સમીકરણ (6) ઓળખ x(k) = x(k) માં ઉમેરીને સિસ્ટમની સ્ટેટ સ્પેસને વિસ્તૃત કરીએ. ચાલો x(k) ⎞ ⎛ q(k) − q(k − 1) ⎞ સૂચવીએ. X (k) = ⎛⎜ ⎟ ⎟ , q (k) = ⎜ 0 ⎝ ⎠ ⎝ x(k − 1) ⎠ ચાલો સિસ્ટમ (1) ને વેક્ટર-મેટ્રિક્સ સ્વરૂપમાં રજૂ કરીએ X (k + 1) = A(k) X ( k) + q (k), X (0) = X 0 , (7) (8) જ્યાં A(k) – 2n × 2n મેટ્રિક્સમાં નીચેનું બ્લોક માળખું છે: ⎛ A(k) + En A(k) ) = ⎜ En ⎝ − A(k − 1) ⎞ ⎟. 0 ⎠ (9) રેન્ડમ વેક્ટર X 0 = (x0Τ x−Τ1)Τ નીચેના લક્ષણો ધરાવે છે: M( X (0)) = X 0 , M ((X 0 − X 0)(X 0 − X 0)Τ ) = P0 , (x0Τ (10) x−Τ1)Τ જ્યાં X 0 = . નોંધ કરો કે અહીં આપણે એક n-પરિમાણીય વેક્ટર x−1 પણ રજૂ કરીએ છીએ, જે q(k) અને v(k) થી સ્વતંત્ર છે, અને લાક્ષણિકતાઓ (10) ઑબ્જેક્ટ (1) વિશેની પ્રાથમિક માહિતીમાંથી મેળવી શકાય છે. નોંધ કરો કે માનવામાં આવેલા મોડેલમાં (8) પ્રક્રિયા q (k) સફેદ ગૌસિયન ક્રમ નથી; ⎪ M(q (k)q (j)) = ⎨Q (k − 1), જો j = k − 1, ⎪ 0, જો 0 ≤ j< k − 1, ⎩ (11) Q(k) + Q(k − 1) 0 ⎞ ⎛ −Q(k − 1) 0 ⎞ . Q(k) = ⎛⎜ ⎟ , Q (k − 1) = ⎜ 0 0 0 0 ⎟⎠ ⎝ ⎠ ⎝ (12) Τ где Фильтрация в линейных дискретных нестационарных системах 45 Представим канал наблюдений для расширенной системы (8) в виде y (k) = S (k) X (k) + v(k) , (13) где S (k) = (S (k) 0) , v(k) − случайная последовательность ошибок измерений с характеристиками (4). В качестве уравнения для вычисления оценки вектора состояния расширенной системы выберем уравнение, по своей структуре совпадающее с фильтром Калмана: Xˆ (k + 1) = A(k) Xˆ (k) + K (k)(y (k + 1) − S (k + 1) A(k) Xˆ (k)) , Xˆ (0) = X . (14) 0 Учитывая (8) и (14), получим следующее уравнение для ошибки e(k) = Xˆ (k) − X (k) : e(k + 1) = (A(k) − K (k) S (k + 1) A(k))e(k) + K (k)v(k + 1) + (K (k) S (k + 1) − E2 n)q (k) . (15) В силу (11) и (15), матрица P (k) = M{e(k)eΤ (k)} определится из следующего разностного уравнения: P (k + 1) = (A(k) − K (k) S (k + 1) A(k)) P (k)(A(k) − K (k) S (k + 1) A(k))Τ + +(K (k) S (k + 1) − E2 n)Q (k)(K (k) S (k + 1) − E2 n)Τ + K (k)V (k + 1) K Τ (k) + +(A(k) − K (k) S (k + 1) A(k))(K (k − 1) S (k) − E2 n) × ×Q (k − 1)(K (k) S (k + 1) − E2 n)Τ + (K (k) S (k + 1) − E2 n) × ×Q (k − 1)(K (k − 1) S (k) − E2 n)Τ (A(k) − K (k) S (k + 1) A(k))Τ , P (0) = P0 . (16) Оптимизируемый критерий зададим в виде J (k + 1) = trP (k + 1) . (17) Оптимальные коэффициенты передачи фильтра K(k) определяются из условия dJ (k + 1) =0. (18) dK (k) Учитывая (17) и જમણી બાજુસમીકરણ (16), મેટ્રિક્સમાંથી ટ્રેસના મેટ્રિક્સ ભિન્નતાના નિયમો લાગુ કરીને, અમે શરત (18) મેટ્રિક્સ K(k) નક્કી કરવા માટેનું સમીકરણ મેળવીએ છીએ: − A(k) P (k) A(k)Τ S (k + 1) T + K (k) S (k + 1) A(k) P (k) A(k)Τ S (k + 1)Τ + + K (k) S (k + 1) Q (k) S (k) Τ − Q (k) S (k + 1)Τ − K (k) S (k + 1) Q (k − 1) × ×S (k)Τ K (k − 1 Τ A(k)Τ S (k + 1)Τ + K (k) S (k + 1) Q (k − 1) A(k)Τ S (k + 1)Τ − − K (k) S (k + 1) A(k) K (k − 1) S (k)Q (k − 1) S (k + 1)Τ + + K (k) S (k + 1) A(k) Q ( k − 1) S (k + 1) T + Q (k − 1) S (k) T K (k − 1) T × × A(k) T S (k + 1) T − Q (k − 1) A(k)T S ( k + 1)Τ − A(k)Q (k − 1) S (k + 1)Τ + + A(k) K (k − 1) S (k) Q (k − 1) S (k + 1 )T + K (k)V (k + 1) = 0 . (19) K(k) માટે છેલ્લું સમીકરણ ઉકેલવાથી નીચેનું પરિણામ મળે છે: K (k) = P (k) S (k + 1)Τ (S (k + 1) P (k) S (k + 1) Τ + V (k + 1)) −1 , (20) 46 V.I. સ્માગિન, એસ.વી. Smagin જ્યાં P (k) = A(k) P (k) A(k)Τ + Q (k − 1)(E2 n − S (k)Τ K (k − 1)Τ) A(k)Τ + + A(k)(E2 n − K (k − 1) S (k))Q (k − 1) + Q (k) . (21) નોંધ કરો કે ટ્રાન્સફર ગુણાંક (20) ની ગણતરી કરવા માટે, (21) ના કારણે, K(−1) ની પ્રારંભિક કિંમતો સેટ કરવી જરૂરી છે. સમીકરણ (16) માં શ્રેષ્ઠ ટ્રાન્સમિશન ગુણાંક (20) માટે અભિવ્યક્તિને બદલીને, અમે સમીકરણ P (k + 1) = (E2 n − K (k) S (k + 1)) P(k) , P ( 0) = P0 . (22) ચાલો P (k) અને P (k) મેટ્રિસિસની સમપ્રમાણતા અને બ્લોક રજૂઆતને ધ્યાનમાં લઈને, પ્રમેયના સ્વરૂપમાં મુખ્ય પરિણામ ઘડીએ : ⎛ p (k) P(k) = ⎜ 1 ⎝ p2 (k) ⎛ p (k) p2Τ ( k) ⎞ , P (k) = ⎜ 1 p3 (k) ⎟⎠ ⎝ p2 (k) p2Τ (k) ⎞ , p3 (k) ⎟⎠ (23) બ્લોક માળખાં મેટ્રિક્સ A(k), Q(k), Q (k), S (k) અને મેટ્રિક્સ K (k) ની રજૂઆત ⎛ K (k) ⎞ K (k) = ⎜ 1 ⎟ સ્વરૂપમાં. (24) ⎝ K 2 (k) ⎠ પ્રમેય. અજાણ્યા સતત વિક્ષેપ સાથેની પ્રક્રિયાને સમીકરણો (1) દ્વારા નિર્ધારિત કરવા દો અને નિરીક્ષણ ચેનલનું સ્વરૂપ (3) છે. પછી શ્રેષ્ઠ ફિલ્ટરિંગ અલ્ગોરિધમ નીચેના તફાવત સમીકરણો દ્વારા નક્કી કરવામાં આવે છે: xˆ (k + 1) = (A(k) + En) xˆ (k) − A(k − 1) xˆ (k − 1) + K1 (k) (y (k + 1) − − S (k + 1) [(A(k) + En) xˆ (k) − A(k − 1) xˆ (k − 1)] (25) s પ્રારંભિક શરતો xˆ(0) = x0 , xˆ(1) = M(x(1)) = x1 . (25) માં મેટ્રિક્સ K1 (k) ફોર્મ્યુલા (26) K1 (k) = p1 (k) S (k + 1) T (S (k + 1) p1 (k) S (k + 1) દ્વારા નક્કી થાય છે )T + V (k + 1)) −1, જ્યાં મેટ્રિક્સ p1 (k) ની ગણતરી સમીકરણોની સિસ્ટમમાંથી કરવામાં આવે છે (27) p1 (k) = (A(k) + En) p1 (k)(A( k) + En)Τ − A(k − 1) p2 (k)(A(k) + En)Τ − −(A(k) + En) p2Τ (k) A(k − 1)Τ + A( k − 1) p3 (k ) A(k − 1)Τ + Q(k − 1) S (k)Τ K1 (k − 1)Τ × ×(A(k) + En)Τ − Q(k − 1) S (k)Τ K 2 (k − 1)Τ AΤ (k − 1) + +(A(k) + En) K1 (k − 1) S (k)Q(k − 1) − A( k − 1) K 2 ( k − 1) S (k) × × Q(k − 1) − (A(k) + En)Q(k − 1) − Q(k − 1)(A(k) + En)Τ + Q(k) + Q(k − 1) , p2 (k) = p1 (k)(A(k) + En)Τ − p2Τ (k) A(k − 1)Τ + + K1 (k − 1) S ( k) Q(k − 1) − Q(k − 1) , p3 (k) = p1 (k) , p1 (k + 1) = (En − K1 (k) S (k + 1)) p1 (k ) , p1 (0) = p1,0 , p2 (k + 1) = − K 2 (k) S (k + 1) p1 (k) + p2 (k) , p2 (0 ) = p2,0 , p3 (k + 1) = − K 2 (k) S (k + 1) p2Τ (k) + p3 (k) , p3 (0) = p3,0 , K 2 (k) = p2 (k) S (k + 1)Τ (S (k + 1) p1 (k) S (k + 1)T + V (k + 1)) −1 . (28) રેખીય અલગ બિન-સ્થિર સિસ્ટમોમાં ફિલ્ટરિંગ 47 માં (28) પ્રારંભિક પરિસ્થિતિઓ p1,0, p2,0, p3,0, મેટ્રિક્સ P0 ના અનુરૂપ બ્લોક્સ છે. નોંધ કરો કે (28) માં ગણતરીઓ કરવા માટે, K1 (−1) અને K 2 (−1) માટે પ્રારંભિક શરતો સેટ કરવી જરૂરી છે. ટિપ્પણી. નિયંત્રિત ઑબ્જેક્ટ x(k + 1) = A(k) x(k) + B(k)u (k) + f + q(k), x(0) = x0 , (29) અજાણ્યા સતત ખલેલ f સિવાય ઑબ્જેક્ટ, તેને એવા સ્વરૂપમાં રૂપાંતરિત કરવું જરૂરી છે જે એક શબ્દ દ્વારા (8) થી અલગ હશે: X (k + 1) = A(k) X (k) + B (k)(u (k) − u ( k − 1) + q (k), X (0) = X 0 , (30) જ્યાં મેટ્રિક્સ A(k) સૂત્ર (9) માં આપવામાં આવે છે, q (k) લાક્ષણિકતાઓ ધરાવે છે (11), (12) માં ( 30) મેટ્રિક્સ B () માં B (k) ⎞ B (k) = ⎛⎜ ⎟ ⎝ 0 ⎠ પછી ફિલ્ટર સમીકરણો નીચે મુજબ હશે: (31) xˆ (k + 1) = (A. (k) + En) xˆ (k) − A(k − 1) xˆ (k − 1) + B(k)(u (k) − u (k − 1)) + K1 (k)(y (k) + 1) − − S (k + 1) [(A(k) + En) xˆ (k) − A(k − 1) xˆ (k − 1) + B(k)(u (k) − u ( k − 1))] , (32) પ્રારંભિક શરતો સાથે (26), અને મેટ્રિક્સ K1 (k) એ (27) અને (28) ગણતરીના પ્રયોગના પરિણામો અનુસાર નક્કી કરવામાં આવે છે પ્રકાર (1) અને અવલોકન ચેનલ (3) ના બીજા-ક્રમના મોડેલ માટે અલ્ગોરિધમ. નીચેના મૂલ્યો સાથેપરિમાણો: 0 1 0 ⎞ ⎞ ; Q = ⎛ 0.01 ; વી = 0.9; A(k) = ⎛⎜ ⎟ ⎜ 0 0, 02 ⎟⎠ ⎝ ⎝ 0, 05 0.925 + 0.1sin(0, 01k) ⎠ 1, 0 1, 0 0 ⎞ S = (1 1) x0 = ⎛⎜ ⎞⎟ ; P0 = ⎛⎜ (33) ⎟. ⎝ 1.5 ⎠ ⎝ 0 1, 0 ⎠ વેક્ટર x(k) અંદાજોની ગણતરી બે તબક્કાના ફિલ્ટરિંગ અલ્ગોરિધમનો ઉપયોગ કરીને કરી શકાય છે. આ કિસ્સામાં માપન મોડલ (1)ને ધ્યાનમાં લેતા y (k + 1) = Sx(k + 1) + v(k + 1) = SA(k) x(k) + Sf + Sq( k) + v(k + 1) . (34) અજ્ઞાત વેક્ટર f નો અંદાજ કાઢવા માટે આવર્તક સમીકરણો fˆ (k + 1) = fˆ (k) + K (k)(y (k + 1) − SA(k) xˆ (k) − Sfˆ (k) સ્વરૂપ ધરાવે છે )) , fˆ (0) = f , 0 f Τ Τ Τ −1 K f (k) = Pf (k) S (SPf (k) S + SQS + V) , જ્યાં Pf (k + 1) = (E2 − K f (k) S) Pf (k), Pf (0) = Pf0 , (35) M( f ) = f 0 , M((f − f 0)(f − f 0)Τ ) = Pf0 . (36) V.I. સ્માગિન, એસ.વી. Smagin 48 અજાણ્યા સતત ઇનપુટ સાથે ઑબ્જેક્ટ માટે સ્ટેટ વેક્ટરનો અંદાજ સમીકરણ દ્વારા આપવામાં આવે છે: xˆ (k + 1) = A(k) xˆ (k) + fˆ (k) + K (k)(y (k) + 1) − SA(k ) xˆ (k) − Sfˆ (k)), (37) x જ્યાં મેટ્રિક્સ K x (k) કાલમાન ફિલ્ટરના સ્થાનાંતરણ ગુણાંકને નિર્ધારિત કરે છે. મોડેલિંગ કરતી વખતે આપણે 0 1, 0 0 ⎞ f 0 = ⎛⎜ ⎞⎟ , Pf0 = ⎛⎜ (38) ⎟ નો ઉપયોગ કરીએ છીએ. ⎝0⎠ ⎝ 0 1, 0 ⎠ આ ઉદાહરણ માટે વિસ્તૃત કાલમેન ફિલ્ટરનો ઉપયોગ (આ કિસ્સામાં, સમીકરણ (1) સમીકરણ f(k+1) = f(k) ઉમેરીને વિસ્તૃત કરવામાં આવે છે. ડાયનેમિક્સ, ઓબ્ઝર્વેશન ચેનલ અને એડિટિવ ડિસ્ટર્બન્સની તીવ્રતાના નીચેના મેટ્રિસિસ સાથે એક અલગ સિસ્ટમ માટે કાલમેન ફિલ્ટર બનાવો: Q 0⎞ ⎛ A(k) E2 ⎞ , (S 0) , ⎛⎜ (39) ⎟. ⎜ 0 E2 ⎟⎠ ⎝ 0 0⎠ ⎝ આમાં ઉપયોગ કરો આ ઉદાહરણમાંઅજ્ઞાત ઇનપુટ વેક્ટર: n≥m અને l≥m ના શ્રેષ્ઠ અંદાજોના અસ્તિત્વ માટેની શરતોને પૂર્ણ કરવામાં નિષ્ફળતાને કારણે કાર્યોમાં વર્ણવેલ પદ્ધતિઓ અશક્ય છે. (40) અજ્ઞાત વિક્ષેપને f = Gd તરીકે વ્યાખ્યાયિત કરવામાં આવે છે, જ્યાં d એ અજાણ્યો m-પરિમાણીય વેક્ટર છે, G એ n × m જાણીતો મેટ્રિક્સ છે. ધ્યાનમાં લેવાયેલા ઉદાહરણમાં, G = E2, n = 2, m = 2, l = 1, જેનો અર્થ છે કે શરતો (40) સંતુષ્ટ નથી. ફિલ્ટરિંગ અલ્ગોરિધમનો ઉપયોગ ત્રણ સાથે અજાણ્યા ચલ વિક્ષેપ માટે પણ અભ્યાસ કરવામાં આવ્યો હતો. શક્ય મૂલ્યોવેક્ટર f ના ઘટકો: ⎧ 1, જો 0 ≤ k ≤ 9, ⎪ f1 (k) = f 2 (k) = ⎨ −1, જો 9< k < 25, ⎪ 1, если 25 ≤ k ≤ 50. ⎩ На рис. 1 приведены реализации процессов и их оценок для трех сравниваемых фильтров. Отметим, что при реализации алгоритма фильтрации (25), начальные значения K1 (−1) и K 2 (−1) задавались нулевые. x1(k) x1(k) x2(k) x2(k) 2 10 0 –10 0 3 4 20 30 40 k –10 0 4 1 0 1 10 3 10 2 10 20 30 40 k Рис. 1. Реализации процессов и оценок (1 – реализация x(k); 2 – оценка, построенная по алгоритму (25); 3 – оценка, построенная по двухэтапному алгоритму; 4 – оценка для расширенного фильтра Калмана) Фильтрация в линейных дискретных нестационарных системах 49 На рис. 2 приведены ошибки оценивания компонент вектора состояния. e1(k) 4 2 e2(k) 4 3 1 0 –2 –4 –6 0 2 2 3 1 0 2 –2 10 20 30 40 k –4 0 10 20 30 40 k Рис. 2. Графики ошибок фильтрации (1 – ошибка для оценки, построенной по алгоритму (25); 2 – ошибка для оценки, построенной по двухэтапному алгоритму; 3 – ошибка для расширенного фильтра Калмана) Как видно из рисунков для рассмотренного примера, качество оценок, полученных с помощью фильтра (25), лучше, чем для двухэтапного алгоритма фильтрации и расширенного фильтра Калмана, использующих оценки неизвестного возмущения. Отметим также, что для алгоритма фильтрации (25) не нужно задавать априорную информацию о характеристиках распределения начальных значений f 0 и Pf0 . Ниже, в таблице, приведены средние значения среднеквадратических ошибок оценивания для трех рассматриваемых методов, рассчитанных по 50 реализациям. Как видно из таблицы, предложенный метод фильтрации (25) обеспечивает સરેરાશ ભૂલ અન્ય પદ્ધતિઓ કરતાં 3-4 ગણી ઓછી. રાજ્ય વેક્ટર ઘટકો અલ્ગોરિધમ (25) e1,avg = 0.0912 બે-તબક્કાના અલ્ગોરિધમ e1,avg = 0.3128 વિસ્તૃત કાલમેન ફિલ્ટર e1,avg = 0.4103 e2,avg = 0.4103 e2,avg = 0. 0 ,2917 e2,av = 0.4296 નિષ્કર્ષ એવા ઑબ્જેક્ટ માટે અલગ શ્રેષ્ઠ બિન-સ્થિર ફિલ્ટરના સંશ્લેષણ માટે એક અલ્ગોરિધમ વિકસાવવામાં આવ્યું છે જેની વિક્ષેપમાં અજ્ઞાત સ્થિર ઘટક હોય છે. એલ્ગોરિધમ સ્ટેટ સ્પેસના વિસ્તરણ અને મોડેલમાંથી અજાણ્યા ઘટકને બાકાત રાખવાના આધારે બનાવવામાં આવ્યું છે. ક્લાસિકલ કાલમેન ફિલ્ટરથી વિપરીત, સૂચિત ફિલ્ટર અગાઉના બે પગલાં પર બાંધવામાં આવેલા રિકરન્ટ અંદાજોનો ઉપયોગ કરે છે. જેમ કે કોમ્પ્યુટેશનલ પ્રયોગના પરિણામો દર્શાવે છે, અલ્ગોરિધમને વિક્ષેપના ભાગરૂપે સતત અજાણ્યા ઉમેરણ ઘટક પર લાગુ કરી શકાય છે. સંદર્ભો 1. Astrom K., Eykhoff P. સિસ્ટમ ઓળખ. એક સર્વેક્ષણ // ઓટોમેટિકા. 1971. વી. 7. પી. 123−162. 2. ફ્રિડલેન્ડ B. પુનરાવર્તિત ફિલ્ટરિંગમાં પૂર્વગ્રહની સારવાર // IEEE ટ્રાન્સ. ઓટોમેટ પર. કોન્ટ્રા. 1969. વી. એસી-14. પૃષ્ઠ 359−367. 3. ચેન જે., પેટન આર.જે. અજ્ઞાત વિક્ષેપ સાથે સ્ટોકેસ્ટિક સિસ્ટમ્સનું શ્રેષ્ઠ ફિલ્ટરિંગ અને મજબૂત ખામી નિદાન // IEE પ્રોક. નિયંત્રણ સિદ્ધાંત એપ્લિકેશન. 1996. વી. 143. પૃષ્ઠ 31–36. 50 V.I. સ્માગિન, એસ.વી. Smagin 4. Darouach M., Zasadzinski M. અજ્ઞાત એક્ઝોજેનસ ઇનપુટ્સ સાથે સિસ્ટમો માટે નિષ્પક્ષ લઘુત્તમ તફાવત અંદાજ // Automatica. 1997. વી. 33. પૃષ્ઠ 717–719. 5. Darouach M., Zasadzinski M., Xu S. J. અજાણ્યા ઇનપુટ્સ સાથે લીનિયર સિસ્ટમ્સ માટે પૂર્ણ-ક્રમ નિરીક્ષકો // IEEE ટ્રાન્સ. ઓટોમેટ પર. કોન્ટ્રા. 1999. વી. એસી-39. પી. 606. 6. ગિલિજન્સ એસ., મૂર બી. લીનિયર ડિસ્ક્રીટ-ટાઇમ સિસ્ટમ્સ માટે નિષ્પક્ષ લઘુત્તમ-વિવિધ ઇનપુટ અને રાજ્ય અંદાજ // ઓટોમેટિકા. 2007. વી. 43. પૃષ્ઠ 111–116. 7. Hou M., Patton R. અજ્ઞાત ઇનપુટ્સ સાથે સિસ્ટમો માટે શ્રેષ્ઠ ફિલ્ટરિંગ // IEEE ટ્રાન્સ. ઓટોમેટ પર. કોન્ટ્રા. 1998. વી. એસી-43. પૃષ્ઠ 445–449. 8. Hsieh C.-S. અજ્ઞાત ઇનપુટ્સ સાથે સિસ્ટમો માટે નિષ્પક્ષ લઘુત્તમ-વિવિધતા અંદાજ માટે એકીકૃત ઉકેલ // પ્રોક.17મી વર્લ્ડ કોંગ્રેસ ધ ઇન્ટરનેશનલ ફેડરેશન ઓફ ઓટોમેટિક કંટ્રોલ. સિઓલ. કોરિયા. જુલાઈ 6 - 11, 2008. પૃષ્ઠ 14502–14509. 9. Hsieh C.-S. અજાણ્યા ઇનપુટ્સ સાથે સિસ્ટમો માટે મજબૂત બે-સ્ટેજ કાલમેન ફિલ્ટર્સ // IEEE ટ્રાન્સ. ઓટોમેટ પર. કોન્ટ્રા. 2000. વી. એસી-45. પૃષ્ઠ 2374–2378. 10. Hsieh C.-S. અજ્ઞાત ઇનપુટ્સ સાથે સિસ્ટમો માટે શ્રેષ્ઠ નિષ્પક્ષ લઘુત્તમ-વિવિધ ફિલ્ટરનું વિસ્તરણ // Proc. ઇલેક્ટ્રોનિક સિસ્ટમ્સની નોનલાઇનર ડાયનેમિક્સ પર 15મી IEEE ઇન્ટરનેશનલ વર્કશોપ. ટોકુશિમા. જાપાન. 2007. પૃષ્ઠ 217–220. 11. Hsieh C. -એસ. અજ્ઞાત ઇનપુટ્સ સાથે અનિશ્ચિત સિસ્ટમો માટે મજબૂત પેરામીટરાઇઝ્ડ ન્યૂનતમ વિચલન ફિલ્ટરિંગ // Proc. અમેરિકન નિયંત્રણ પરિષદ. ન્યુયોર્ક. 2007, પૃષ્ઠ 5118–5123. 12. કાલમન આર.ઇ., વ્યસ્ત આર. રેખીય ફિલ્ટરિંગ અને આગાહી સિદ્ધાંતમાં નવા પરિણામો // ટ્રાન્સ. ASME જે. બેઝિક એન્જી. 1961. વી. 83. પૃષ્ઠ 95-108. 13. બ્રામર કે., ઝિફલિંગ જી. કાલમેન-બ્યુસી ફિલ્ટર. એમ.: નૌકા, 1972. 200 પૃષ્ઠ. 14. પુગાચેવ વી.એસ., સિનિટસિન આઈ.એન. સ્ટોકેસ્ટિક વિભેદક સમીકરણોએમ.: નૌકા, 1990. 630 પૃષ્ઠ. 15. સ્માગિન એસ.વી. રેખીય માં ફિલ્ટરિંગ સ્વતંત્ર સિસ્ટમોઅજાણ્યા ખલેલ સાથે // ઓટોમેટ્રી. 2009. ટી. 45. નંબર 6. પી. 29−37. 16. એમોસોવ એ.એ., કોલ્પાકોવ વી.વી. સ્કેલર-મેટ્રિક્સ ડિફરન્સિએશન અને તેની એપ્લિકેશન રચનાત્મક કાર્યોસંચાર સિદ્ધાંત // માહિતી પ્રસારણની સમસ્યાઓ. 1972. નંબર 1. પી. 3−15. Smagin Valery Ivanovich Smagin Sergey Valerievich Tomsk State University E-mail: [ઇમેઇલ સુરક્ષિત]; [ઇમેઇલ સુરક્ષિત] 6 ડિસેમ્બર, 2010 ના રોજ સંપાદક દ્વારા પ્રાપ્ત.